

3.Загальні теоретичні відомості
3.1. Загальна теорія мостових схем
Всі первинні вимірювальні перетворювачі (ПВП), які використовуються для
вимірювання загально-технічних параметрів (температура, тиск, витрати, рівень тощо) технологічних процесів, можна умовно розділити на дві групи:
- активні (генераторні), які перетворюють вимірюваний параметр у напругу, електрорушійну силу, або струм, та
- пасивні (параметричні), які перетворюють параметр в опір, індуктивність та ємність.
Найбільш універсальним для вимірювання сигналів ПВП в обох випадках є:
- використовування зрівноважених та незрівноважених мостових схем для перетворення вимірювальної інформації пасивних ПВП (принцип роботи грунтується на вимірюванні зміни опору ПВП методом зрівноваженого або незрівноваженого моста); т а - використовування незрівноважених мостових схем ( як компенсаційних) для перетворення вимірювальної інформації генераторних ПВП.
На рис. 1,а приведена схема одинарного чотириплечного лабораторного

 в)
в)
Рис. 1. Вимірювальна схема одинарного моста Уітстона.
зрівноваженого моста Уітстона, який працює у комплекті з термометром опо-
ру (ТО).
Мостова схема – це чотири з’єднаних
між собою опори R![]() ,
R
,
R![]() ,
R
,
R![]() та
та
R![]() ,
що утворюють квадрат. Суть роботи такої
схеми полягає в тому, що вона дозволяє
визначити один невідомий опір R
,
що утворюють квадрат. Суть роботи такої
схеми полягає в тому, що вона дозволяє
визначити один невідомий опір R![]() ТО
за допомогою трьох відомих R
ТО
за допомогою трьох відомих R![]() ,
R
,
R![]() та
R
та
R![]() .
Невідомий опір R
.
Невідомий опір R![]() може
бути ввімненим (рис. 1,в) у будь-яку із
сторін квадрату (вони називаються
плечами моста).
може
бути ввімненим (рис. 1,в) у будь-яку із
сторін квадрату (вони називаються
плечами моста).
До інших термінів
мостової схеми відносяться: вершини
моста (![]() ),
верхня (
),
верхня (![]() )
та нижня (
)
та нижня (![]() )
вітки моста та діагоналі живлення і
вимірювальна з відповідними напругами
)
вітки моста та діагоналі живлення і
вимірювальна з відповідними напругами![]() та
та![]() .
.
Розрізняють мости постійного та змінного струмів. До мостів постійного струму відносяться схеми мостів, в плечах яких знаходяться тільки активні опори і які живляться напругою постійного струму. До них умовно відносять і мости, які живляться змінним струмом, але при умові наявності тільки активних опорів у їхніх плечах. До мостів змінного струму відносяться схеми мостів, в плечах яких знаходяться реактивні опори і які живляться напругою
змінного струму.
У зрівноважених
лабораторних та автоматичних мостах
напруга у вимірювальній діагоналі
повинна дорівнювати нулю у момент видачі
інформації про значення невідомого
опору, тобто,
![]() =
0 – це основна умова балансу (рівноваги)
моста. Напруга у вимірювальній діагоналі
моста при його зрівноважуванні буває
в межах декількох мВ. Тому в якості
приладів, їх називають нуль-приладами
(НП),
що фіксують момент, коли
=
0 – це основна умова балансу (рівноваги)
моста. Напруга у вимірювальній діагоналі
моста при його зрівноважуванні буває
в межах декількох мВ. Тому в якості
приладів, їх називають нуль-приладами
(НП),
що фіксують момент, коли
![]() =
0, використовують прилади із високою
чутливістю. В мостових лабораторних
схемах постійного струму в якості НП
використовують гальванометри
магнітоелектричної системи, міліамперметри
(рис.1,в) або спеціальні електронні
підсилювачі в автоматичних мостах.
Відмінності лабораторних мостів змінного
струму в тому, що на низьких частотах
живлення (50 Гц) в якостіНП
використовують вібраційні гальванометри,
а на підвищених частотах - телефони.
Живлення останніх здійснюється від
електронних генераторів, а як покажчики
рівноваги в мостах використовуються
спеціальні електронні прилади.
=
0, використовують прилади із високою
чутливістю. В мостових лабораторних
схемах постійного струму в якості НП
використовують гальванометри
магнітоелектричної системи, міліамперметри
(рис.1,в) або спеціальні електронні
підсилювачі в автоматичних мостах.
Відмінності лабораторних мостів змінного
струму в тому, що на низьких частотах
живлення (50 Гц) в якостіНП
використовують вібраційні гальванометри,
а на підвищених частотах - телефони.
Живлення останніх здійснюється від
електронних генераторів, а як покажчики
рівноваги в мостах використовуються
спеціальні електронні прилади.
Виведемо
залежність напруги у вимірювальній
діагоналі
(рис. 1,а) від значень напруги живлення
![]() та опорів плечей моста при умові, що
опір НП, який ввімкнений у вимірювальну
діагональ дуже великий (сотні кОм) і ним
можна нехтувати (або перемикач
розімкнений). В цьому випадку
та опорів плечей моста при умові, що
опір НП, який ввімкнений у вимірювальну
діагональ дуже великий (сотні кОм) і ним
можна нехтувати (або перемикач
розімкнений). В цьому випадку![]() =
=![]() у верхній вітці моста, а
у верхній вітці моста, а![]() =
=![]() - у нижній, і можемо визначити напругу
у вимірювальній діагоналі як різницю
потенціалів між точками
- у нижній, і можемо визначити напругу
у вимірювальній діагоналі як різницю
потенціалів між точками![]() та
та![]() ,
яка в свою чергу залежить від спадів
напруг на резисторах
,
яка в свою чергу залежить від спадів
напруг на резисторах![]() та
та![]() :
:
![]() =
=
![]() -
-![]() =
=![]() .
(1)
.
(1)
Після перетворення (їх виконати студенту самостійно!!!) залежності (1), отримуємо:
![]() =
=
![]() .
(2)
.
(2)![]()
Умова рівноваги
моста, тобто,
![]() =0,
може бути досягнута, якщо чисельник
рівняння (2) буде теж дорівнювати нулю.
Тому, як наслідок рівноваги:
=0,
може бути досягнута, якщо чисельник
рівняння (2) буде теж дорівнювати нулю.
Тому, як наслідок рівноваги:
![]() =
=
![]() .
(3)
.
(3)
Рівняння (3) можемо записати у вигляді основного рівняння зрівноважування:
![]() =
=
![]() .
(4)
.
(4)
Для виконування
зрівноважування в якості опору
![]() використовують реохорд, що є змінним
опором, який має одночасно шкалу зміни
свого опору (рис.1,а).
використовують реохорд, що є змінним
опором, який має одночасно шкалу зміни
свого опору (рис.1,а).
При умові
![]() =
=![]() та досягненні, за рахунок зміни опору
та досягненні, за рахунок зміни опору![]() ,
умови рівноваги
,
умови рівноваги
моста
![]() =
0, яка фіксується нуль-приладом, -
невідомий опір
=
0, яка фіксується нуль-приладом, -
невідомий опір![]() дорівнює
дорівнює![]() .
.
Якщо реохорд ввімкнений в одне плече моста(рис. 1,а,б), то таку схему
зрівноважування називають схемою порівняння. В більшості випадків
рівновагу автоматичних мостів забезпечують зміною відношення двох
суміжних плечей, між яким установлюють реохорд (рис. 2.) Реохорд з опором
![]() установлений між
опорами
установлений між
опорами
![]() та
та![]() ,
а точкою
,
а точкою![]() вимірювальної діагоналі з напругою
вимірювальної діагоналі з напругою![]() для даної схеми, є потенціал на повзунку
реохорда.
для даної схеми, є потенціал на повзунку
реохорда.
В лабораторних
мостах (рис. 1,а,б) зрівноважування
виконують, переміщуючи повзунок реохорда
вручну, а в автоматичних (рис. 2) – таке
переміщення здійснюється за рахунок
використовування реверсивного двигуна
(РД) та спеціальної кінематичної схеми.
В автоматичних мостах використовується
також спеціальний електронний підсилювач
ЕП,
який здійснює вимірювання напруги
![]() у вимірювальній діагоналі і перетворює
знак її зміни, у відповідності із
рівнянням (2), на напругу змінного стуму
у керуючій обмотці (ОК) РД, при чому із
зсувом фази між струмом та напругою
живлення в ОК, яка дорівнює або нулю,
або 180
у вимірювальній діагоналі і перетворює
знак її зміни, у відповідності із
рівнянням (2), на напругу змінного стуму
у керуючій обмотці (ОК) РД, при чому із
зсувом фази між струмом та напругою
живлення в ОК, яка дорівнює або нулю,
або 180![]() в залежності від знаку відхилення
в залежності від знаку відхилення![]() від нуля.ЕП
генерує
також напругу в обмотку (ОЗ) збудження
РД, підготовлюючи його до обертання.
Обмотки ОЗ та ОК зсунуті в просторі на
90
від нуля.ЕП
генерує
також напругу в обмотку (ОЗ) збудження
РД, підготовлюючи його до обертання.
Обмотки ОЗ та ОК зсунуті в просторі на
90![]() .
Якщо міст зрівноважений, то напруга в
ОК відсутня і РД не обертається. Зміна
опору
.
Якщо міст зрівноважений, то напруга в
ОК відсутня і РД не обертається. Зміна
опору![]() виводить міст із рівноваги і на керуючій
обмотці ОК з’являється напруга з
зсувом фази 0 або 180
виводить міст із рівноваги і на керуючій
обмотці ОК з’являється напруга з
зсувом фази 0 або 180![]() .
Одночасно обидві напруги на обмотках
ОЗ та ОК утворюють обертальне магнітне
поле, яке приводить до обертання РД за
або проти годинникової стрілки. Це
приводить до переміщення повзунка
реохорда (в одну або протилежну сторону)
в положення, яке відповідає стану нової
рівноваги моста. З повзунком реохорда
зв'язана стрілка його шкали, положення
якої на шкалі, як правило, завчасно
проградуйованій у одиницях вимірюваного
параметру (наприклад, температурі),
відтворює не значення шуканого опору,
а безпосередньо значення вимірюваного
параметру.
.
Одночасно обидві напруги на обмотках
ОЗ та ОК утворюють обертальне магнітне
поле, яке приводить до обертання РД за
або проти годинникової стрілки. Це
приводить до переміщення повзунка
реохорда (в одну або протилежну сторону)
в положення, яке відповідає стану нової
рівноваги моста. З повзунком реохорда
зв'язана стрілка його шкали, положення
якої на шкалі, як правило, завчасно
проградуйованій у одиницях вимірюваного
параметру (наприклад, температурі),
відтворює не значення шуканого опору,
а безпосередньо значення вимірюваного
параметру.
По способу під'єднання термометрів опору (ТО) до мостів розрізняють схеми в два та в три проводи.
За схемою в два проводи (рис. 1,а) ТО з’єднується з мостом двома

Рис. 2. Схема автоматичного моста для вимірювання температури у разі
під'єднання
ТО
![]() до мосту за схемою у два проводи.
до мосту за схемою у два проводи.
проводами з опором
![]() (з одного та другого кінців
(з одного та другого кінців![]() )
і на результати
)
і на результати
вимірювань буде впливати як довжина цих проводів, так і температура
середовища, в якому
вони проходять. Умова рівноваги моста
в цьому випадку відповідає залежності:
![]() =
=![]() ,
а шуканий опір
,
а шуканий опір![]() =
=![]() -
2
-
2![]() .
.
Для забезпечення
градуювання ТО
за такою схемою (рис.1,а), необхідно щоб
незалежно від довжини дротів з’єднання
(опорів
![]() ),
забезпечувалась їхня постійність. Для
цього, додатково (рис. 2) до опорів дротів
з’єднання з опорами
),
забезпечувалась їхня постійність. Для
цього, додатково (рис. 2) до опорів дротів
з’єднання з опорами![]() ,
у ланцюг кола вводять зрівняльні котушки
з опорами
,
у ланцюг кола вводять зрівняльні котушки
з опорами![]()
![]() 2,5
Ом. Мости градуюють за такою схемою на
номінальний сумарний опір дротів
під'єднання, який дорівнює:
2,5
Ом. Мости градуюють за такою схемою на
номінальний сумарний опір дротів
під'єднання, який дорівнює:![]() =
2(
=
2(![]() +
+![]() )
= 5 Ом.
)
= 5 Ом.
Але така схема не
компенсує додаткову похибку від впливу
зміни температури середовища (вона має
значення 20
![]() С
для нормальних умов) на лінію з’єднання,
яка може бути суттєвою.
С
для нормальних умов) на лінію з’єднання,
яка може бути суттєвою.
Тому для виключення
впливу зміни температури та довжини
проводів з’єднання на результати
вимірювання, застосовують схему з’єднання
ТО з мостовою схемою в три дроти. Для
цього в схему вводять третій дріт, яким
одну із клем живлення безпосередньо
під'єднують до головки ТО (рис. 1,б та
рис. 3). Таким
чином, одна із точок вимірювальної
діагоналі (точка В
на рис. 3), знаходиться на одній із клем
головки ТО. Суть такої схеми з’єднання
в тому, що дроти лінії з’єднання з
опорами
![]() (для рис.1,б) тепер входять у суміжні
плечі мостової схеми. А умова рівноваги
має вигляд:
(для рис.1,б) тепер входять у суміжні
плечі мостової схеми. А умова рівноваги
має вигляд:
![]() +
+![]() )
=
)
=![]() .
.
Якщо розрити
дужки цієї залежності (виконати
самостійно!!!),
то видно, що за умови рівності
![]() (яку в таких схемах забезпечують) та
рівності опорів дротів з’єднання
(яку в таких схемах забезпечують) та
рівності опорів дротів з’єднання![]() ,
яка виконується за однакової їх довжині
та поперечного перерізу, довжина дротів
лінії з’єднання з опором
,
яка виконується за однакової їх довжині
та поперечного перерізу, довжина дротів
лінії з’єднання з опором![]() та зміна цього опору, що визивається
зміною температури навколишнього
середовища, практично не впливають на
результати вимірювань.
та зміна цього опору, що визивається
зміною температури навколишнього
середовища, практично не впливають на
результати вимірювань.
Спрощена схема автоматичного моста для вимірювання температури за тридротовою схемою ввімкнення первинного вимірювального перетворювача
![]() приведена на
рис.3.
приведена на
рис.3.
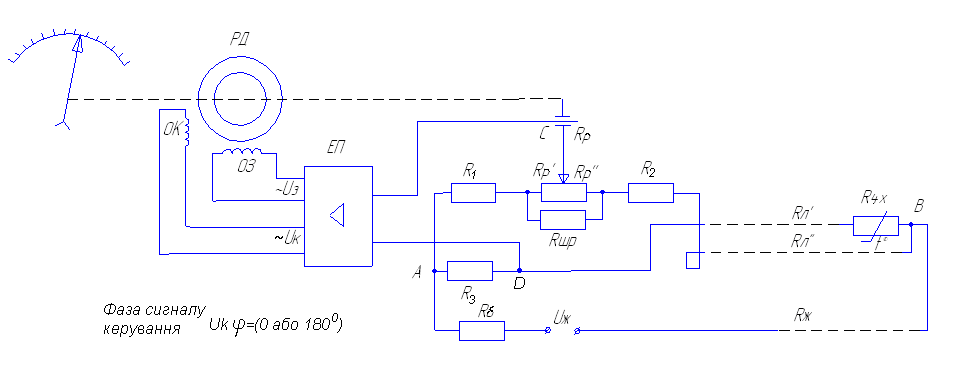
Рис.3.
Схема
автоматичного моста для вимірювання
температури у разі під'єднання ТО
![]() до мосту за схемою у три проводи.
до мосту за схемою у три проводи.