

Приклади виконання самостійної роботи
Приклад 1. Обчислити a, b, якщо x=2, y=0,5, z=10,
 ;
;![]() .
.
Розв’язок
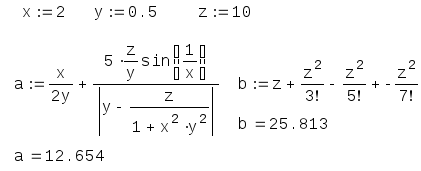
Приклад
2. Знайти
![]() ,
якщо натуральне число n=9,
,
якщо натуральне число n=9,![]() ;
;![]() ;
;![]() ;
;![]() 10.
10.
Розв’язок

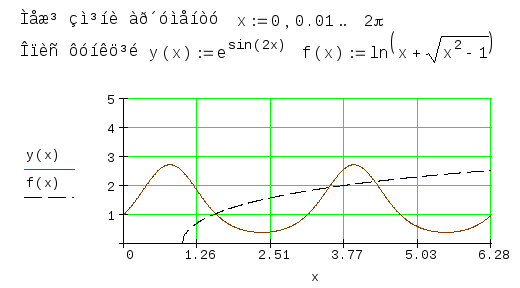
Приклад
3.
Побудувати графіки функцій
![]() та
та![]() на інтервалі [0,
на інтервалі [0,![]() ]
з кроком 0.01.
]
з кроком 0.01.
Розв’язок
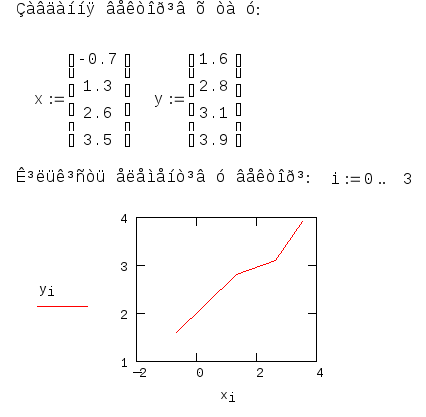
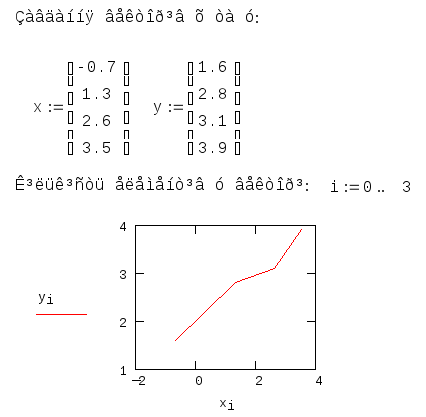
Приклад 4. Побудувати графік функції, що заданий таблицею (векторами х і y).
Таблиця 1.2 – Значення х і y
|
Змінна |
Значення змінних | |||
|
х |
-0,7 |
1,3 |
2,6 |
3,5 |
|
y |
1,6 |
2,8 |
3,1 |
3,9 |
Розв’язок
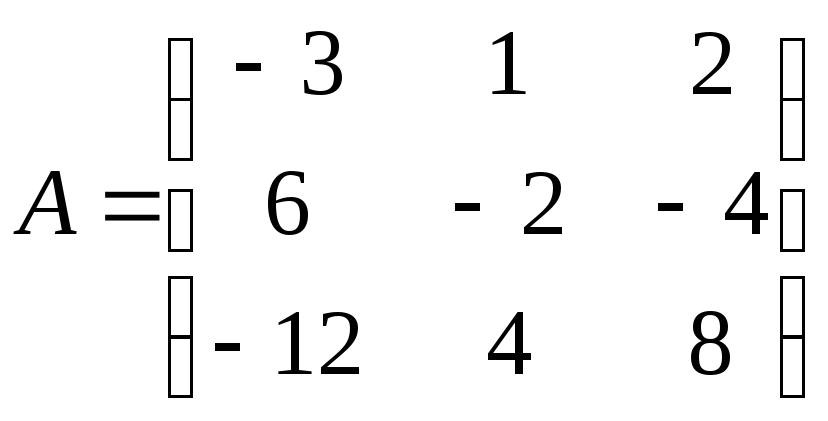
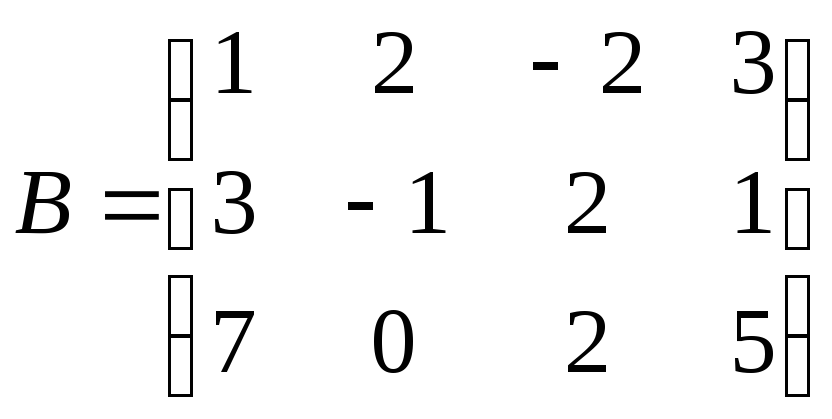
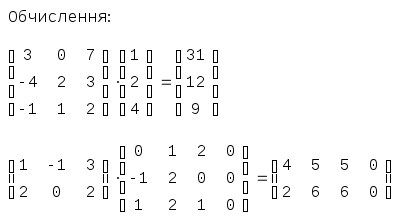
Приклад 5. Провести наступні дії над матрицями:
транспонувати матрицю
 ;
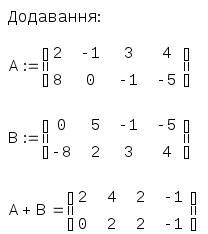
;додати матриці
 і
і ;
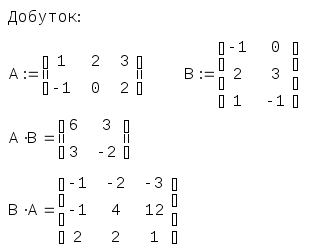
;знайти добутки
 і
і ,
якщо
,
якщо ,
, ;
;обчислити
 ,
,
 ;
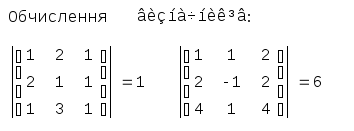
;обчислити визначники матриць
 ,
, ;
;визначити ранґ матриці
 ,
, .
.
Розв’язок


Приклад 6. Обчислити визначені
інтеґрали![]() ,
,![]() .
.
Розв’язок

Порядок виконання і завдання для самостійної роботи
Завантажити пакет MathCAD.
Обчислити математичні вирази, наведені у табл. Б.1 додатка Б.
Обчислити вираз, наведений у табл. Б.2 додатку Б, якщо
 ;
; ;
; ;
; .
.Обчислити визначені інтеґрали, наведені у табл. Б.3 додатка Б.
Побудувати графіки функцій
 ,
, ,
де
,
де ,
, ,
, ,
які визначено на відрізку [а, b] для n
точок (табл. Б.4, додаток Б). Графіки
функцій подати в одній графічній
області. Змінити розмір графічної
області, тип з’єднання точок графіків.
,
які визначено на відрізку [а, b] для n
точок (табл. Б.4, додаток Б). Графіки
функцій подати в одній графічній
області. Змінити розмір графічної
області, тип з’єднання точок графіків.
Примітка. Для виконання завдання необхідно мати уявлення про принципи роботи у середовищі пакета MathCAD, знати команди математичної панелі інструментів, загальної панелі та панелі редаґування тексту; уміти проводити обчислення в автоматичному (Auto) та ручному (Manual) режимах, задавати ранжирувані змінні і будувати графіки функцій.
Контрольні запитання
Охарактеризуйте функціональні можливості прикладного пакета MathCAD.
Назвіть галузі використання пакета і основні об’єкти, з якими він працює.
Назвіть основні команди математичної панелі інструментів пакета MathCAD.
Назвіть основні команди загальної панелі та панелі редаґування тексту пакета MathCAD.
Що таке ранжирована змінна? Як вона задається?
Як побудувати графіки функцій у пакеті MathCAD?
Література: [5, С. 30-320; 6, С. 22-227].
Практичне заняття № 2
ТЕМА. Розв’язання систем лінійних алґебраїчних рівнянь
МЕТА: вивчення чисельних методів розв’язання систем лінійних алґебраїчних рівнянь і придбання навичок їх розрахунку на ЕОМ з використанням пакета MathCAD.
Рекомендації щодо оброблення результатів
Ряд задач аналізу і синтезу фізичних систем різної природи (механічних, гідравлічних, електричних тощо) зводяться до розв’язання систем лінійних алґебраїчних рівнянь (СЛАР). Система n лінійних алґебраїчних рівнянь з n невідомими має вигляд [1, 7, 11]:
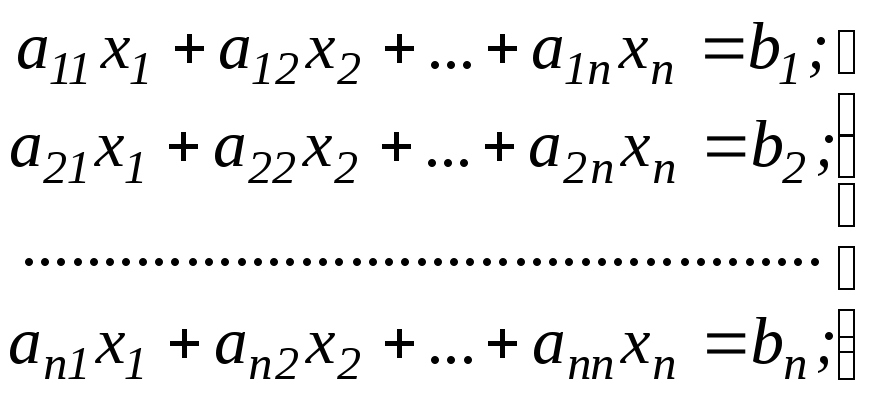 (2.1)
(2.1)
або у векторно-матричній формі
![]() , (2.2)
, (2.2)
де
 –
матриця коефіцієнтів;
–
матриця коефіцієнтів;
 –
вектор-стовпець вільних членів;
–
вектор-стовпець вільних членів;
 –
вектор-стовпець невідомих.
–
вектор-стовпець невідомих.
Запис системи (2.1) у вигляді матричного рівняння (2.2) відрізняється компактністю, дозволяє простіше оцінити властивості й закономірності явищ, спрощує і систематизує операції з перетворення і розв’язання початкових рівнянь.
Насамперед,
під час розв’язання СЛАР треба
переконатися, що вона має єдиний
розв’язок (тобто матриця коефіцієнтів
спільна) – якщо ранґ (rang) матриці A
дорівнює ранґу розширеної матриці D:
rang A = rang D. Система також має єдине
розв’язання, якщо rang A дорівнює кількості
невідомих n, і нескінченно багато
розв’язань, якщо rang An.
Якщо матриця A квадратна та її визначник
(детермінант) не дорівнює нулю: detA![]() 0,
то вона називається невласною
(неособливою). Матриця, що є невласною,
спільна, і має єдине розв’язання.
0,
то вона називається невласною
(неособливою). Матриця, що є невласною,
спільна, і має єдине розв’язання.
Для розв’язання рівняння (2.2) необхідно виконати наступні дії:
![]() ;
;
![]() , (2.3)
, (2.3)
де
![]() – обернена матриця для матриці
A.
– обернена матриця для матриці
A.
Обчислення оберненої матриці здійснюють у такому порядку:
транспонувати початкову матрицю А, тобто знайти
 (замінити рядки матриці її стовпцями);
(замінити рядки матриці її стовпцями);замінити кожний елемент отриманої матриці її алґебраїчним доповненням
 ,
де
,
де – мінор елемента
– мінор елемента ,
визначник (n-1)-го порядку, утворений з
даного визначника закреслюванням і-го
рядка та і-го стовпця;
,
визначник (n-1)-го порядку, утворений з
даного визначника закреслюванням і-го
рядка та і-го стовпця;обчислити визначник
 матриці
матриці ;
;розділити кожне значення
 на
на .
.
Розв’язання рівнянь матричним способом не завжди ефективно, оскільки пов’язано з тим, що коефіцієнти матриці А можуть мати різні порядки і при переводу в обернену матрицю накопичується помилка.
Якщо
матриця А
невироджена,
тобто якщо її визначник не дорівнює
нулю
![]() ,
то система рівнянь має єдине розв’язання.
Значення невідомих
,
то система рівнянь має єдине розв’язання.
Значення невідомих![]() може бути отримано за формулами Крамера:
може бути отримано за формулами Крамера:
![]() ,
,![]() ,
… ,
,
… ,![]() , (2.4)
, (2.4)
де
![]() і
і![]() –
відповідно
визначники матриць
–
відповідно
визначники матриць
![]() іА.
іА.
Визначник
(детермінант)
![]() отримують з
отримують з![]() заміною стовпця, складеного з коефіцієнтів
заміною стовпця, складеного з коефіцієнтів![]() при невідомому
при невідомому![]() ,
стовпцем, складеним з вільних членів
,
стовпцем, складеним з вільних членів![]() .
.
Так,
наприклад:  .
.
Обчислення визначника матриці 2-го порядку здійснюють за схемою:
![]() . (2.5)
. (2.5)
Обчислення визначника матриці 3-го порядку (за правилом Саррюса приписують перші два стовпці) здійснюють таким чином:

![]() . (2.6)
. (2.6)
На практиці для розв’язання матричних рівнянь застосовують прямі (точні) та ітераційні (наближені) чисельні методи.
Прямими називають методи, які в припущенні, що обчислення ведуть без округлень, дозволяють отримати точне розв'язання за кінцеве число арифметичних операцій.
До прямих методів відносять: метод Крамера, методи Ґаусса і його модифікації. Такі методи застосовують на практиці для розв’язання систем на ЕОМ з числами порядку не вище ніж 103.
Ітераційні методи навіть у припущенні, що обчислення ведуть без округлень, дають наближене розв'язання системи з наперед заданою точністю. Точне розв'язання в даному випадку теоретично може бути отримано як результат нескінченного процесу. Характерними представниками цього класу є метод простих ітерацій, метод Зейделя. На практиці ітераційні методи застосовують для розв’язання систем з числами порядку 106.
Відомо, що у випадках, коли матриця коефіцієнтів містить велику кількість нульових елементів, ітераційні методи заздалегідь дають краще розв’язання, ніж прямі методи.
Обчислення
за методом Ґаусса полягає в проведенні
двох етапів: прямого і зворотного ходів.
Серед елементів
![]() де
де![]() матриці А вибирають найбільший за
модулем
матриці А вибирають найбільший за
модулем![]() ,
який називають головним елементом.
Відповідний рядок матриці А з номером
р називають головним рядком. Припустимо,
що
,
який називають головним елементом.
Відповідний рядок матриці А з номером
р називають головним рядком. Припустимо,
що![]() .
Якщо ця рівність не виконується, то
міняємо місцями перший рядок з рядком
р і перший стовпець зі стовпцем
.
Якщо ця рівність не виконується, то
міняємо місцями перший рядок з рядком
р і перший стовпець зі стовпцем![]() і здійснюємо відповідну перенумерацію
коефіцієнтів і невідомих. Інформація
о перенумерації запам’ятовується. У
результаті цих операцій перший рядок
стає головним [1, 11].
і здійснюємо відповідну перенумерацію
коефіцієнтів і невідомих. Інформація
о перенумерації запам’ятовується. У
результаті цих операцій перший рядок
стає головним [1, 11].
Прямий
хід методу Ґаусса полягає в приведенні
початкової матриці до матриці коефіцієнтів
трикутного вигляду, у якій елементи
під головною діагоналлю дорівнюють
нулю. Для цього розділимо на
![]() коефіцієнти першого рівняння (2.1). З
кожного рівняння віднімемо перше
рівняння, попередньо помножене на
відповідний коефіцієнт при
коефіцієнти першого рівняння (2.1). З
кожного рівняння віднімемо перше
рівняння, попередньо помножене на
відповідний коефіцієнт при![]() .
Над іншими рівняннями системи проводимо
аналогічні перетворення. Повторюючи
цей процес, отримаємо рівносильну
систему з трикутною матрицею. У матричному
вигляді прямий хід методу Ґаусса можна
записати так:
.
Над іншими рівняннями системи проводимо
аналогічні перетворення. Повторюючи
цей процес, отримаємо рівносильну
систему з трикутною матрицею. У матричному
вигляді прямий хід методу Ґаусса можна
записати так:
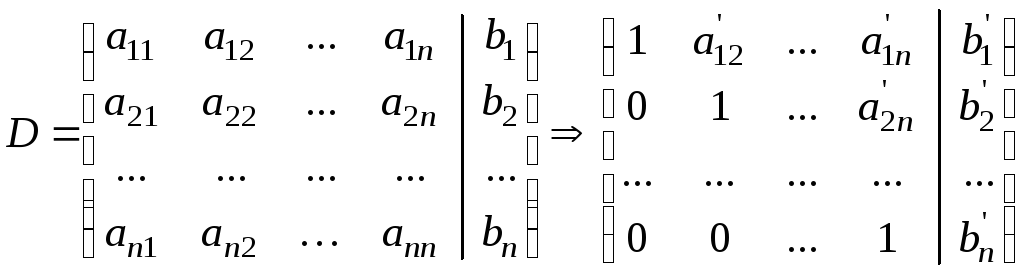 ,
(2.7)
,
(2.7)
де
D –
розширена матриця;
![]() –
перетворені коефіцієнти матриці A та
вектора B.
–
перетворені коефіцієнти матриці A та
вектора B.
Зворотний хід методу Ґаусса полягає в перетворенні трикутної матриці так, щоб у перших n стовпцях отримали одиничну матрицю, а в останньому (n+1)-ому стовпчику цієї матриці містилось розв’язання системи. Розв’язання матриці трикутного вигляду (2.7):
![]() . (2.8)
. (2.8)
Вибір
як головного найбільшого за модулем
елемента матриці А забезпечує найменшу
величину
![]() ,
на яку помножують головний рядок у
процесі послідовного виключення
невідомих. Це, у свою чергу, істотно
зменшує похибку обчислень. Метод Ґаусса
з вибором головного елемента надійний,
простий і широко застосовується під
час розв’язання СЛАР на ЕОМ.
,
на яку помножують головний рядок у
процесі послідовного виключення
невідомих. Це, у свою чергу, істотно
зменшує похибку обчислень. Метод Ґаусса
з вибором головного елемента надійний,
простий і широко застосовується під
час розв’язання СЛАР на ЕОМ.
Під час використання ітераційних методів СЛАР необхідно привести систему (2.1) до ітераційного вигляду [1]:
 (2.9)
(2.9)
або у матричній формі [7]:
![]() ,
k=1, 2, . . . (2.10)
,
k=1, 2, . . . (2.10)
де k – номер ітерації.
Елементи матриці та вектора обчислюють за формулами:
![]() ;
;
![]() ;
;
![]() ;
i, j=1,2,..., n
;
i, j=1,2,..., n
Ітераційний процес припиняється при виконанні умови:
![]() , (2.11)
, (2.11)
де – задана точність.
Приведення початкової СЛАР до вигляду (2.10) може бути виконано різними засобами, але необхідно вибрати такий, щоб система (2.10) приводила до ітераційного процесу, який збігається. Таку задачу завжди розв’язують за допомогою лінійних комбінацій, якщо система має розв’язання. Аналіз збіжності ітераційних методів розв’язання СЛАР пов'язаний з поняттям норми матриці. Найбільше поширення отримали наступні норми матриць [1, 7]:
![]() –максимальна
із сум модулів коефіцієнтів при невідомих
у правій частині системи (2.9), узятих по
рядках, має бути менше одиниці;
–максимальна
із сум модулів коефіцієнтів при невідомих
у правій частині системи (2.9), узятих по
рядках, має бути менше одиниці;
![]() –максимальна
із сум модулів коефіцієнтів при невідомих
у правій частині системи (2.9), узятих по
стовпцях, має бути менше одиниці;
–максимальна
із сум модулів коефіцієнтів при невідомих
у правій частині системи (2.9), узятих по
стовпцях, має бути менше одиниці;
![]() –сума
квадратів усіх коефіцієнтів при
невідомих у правій частині системи
(2.9) має бути менше одиниці.
–сума
квадратів усіх коефіцієнтів при
невідомих у правій частині системи
(2.9) має бути менше одиниці.
Існує правило: якщо хоча б одна з перелічених норм матриці коефіцієнтів рівняння (2.10) менше одиниці, то ітераційний процес буде збіжним при будь-якому виборі початкового наближення. Для застосування ітераційного процесу можна скористатися нерівністю
![]() . (2.12)
. (2.12)
Тобто, якщо діагональні елементи матриці A переважають інші, то для даної матриці можна застосовувати ітераційний процес. Якщо нерівність (2.11) не виконується, то за допомогою лінійних комбінацій можна досягти виконання вказаної вимоги.
У деяких випадках, зручно оцінити кількість ітерацій для досягнення заданої точності розв’язання системи (2.8):
![]() , (2.13)
, (2.13)
де
![]() –
норма вектора коефіцієнтів вільних
членів системи (2.10).
–
норма вектора коефіцієнтів вільних
членів системи (2.10).