

2.2. Порядок виконання роботи
Визначити частоту обертання захоплювального органа, карманчикового та крючкового БЗП (рис. 2.1, 2.2).
Визначити кількість захоплювальних органів
 .
.Завантажити заготовки в бункери відповідних БЗП.
Включити відповідні БЗП і відрегулювати їх роботу.
Визначити
 шляхом трьох вимірювань за секундоміром
(табл. 2.1, 2.2).
шляхом трьох вимірювань за секундоміром
(табл. 2.1, 2.2).Визначити
 за формулою (2.3) для заданого значенняn.
за формулою (2.3) для заданого значенняn.Порівняти експериментальні дані з теоретичними, які наведені в літературі.
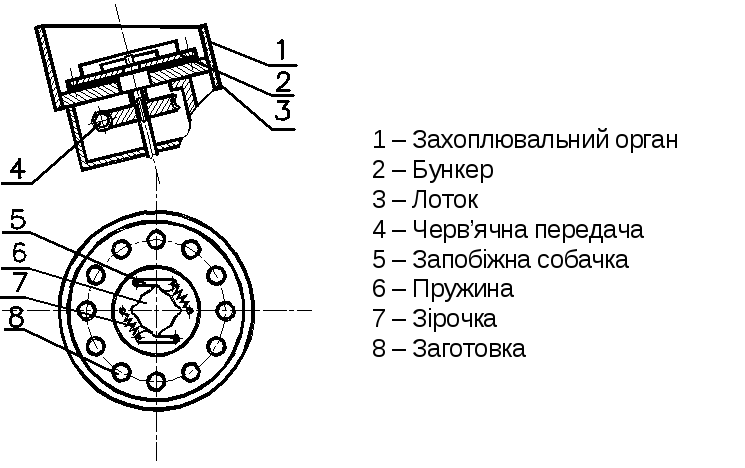
Рис. 2.1 – Схема карманчикового БЗП

Рис. 2.2 – Схема крючкового БЗП
Таблиця 2.1 – Результати вимірювань (для карманчикового БЗП)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
![]()
Таблиця 2.2 – Результати вимірювань (для крючкового БЗП)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
![]()
2.3. Порядок оформлення звіту
Вказати мету роботи.
Зробити теоретичний розрахунок продуктивності і коефіцієнта заповнення пристроїв, що захоплюють заготовки.
Накреслити схеми відповідних БЗП.
Визначити експериментальні значення
 і
і відповідних БЗП.
відповідних БЗП.Визначити розбіжність між теоретичними та експериментальними даними у відсотках.
2.4. Контрольні запитання
Назвіть способи живлення заготовками верстатів-автоматів.
Назвіть різновиди БЗП та їх складові вузли.
Основні принципи побудови БЗП.
Як визначити коефіцієнт заповнення?
Як визначити продуктивність БЗП?
Які залежності існують між продуктивністю і частотою обертання органа БЗП, що захоплює заготовки?
|
Лабораторна робота 3
ЕКСПЕРИМЕНТАЛЬНЕ ВИЗНАЧЕННЯ ЗАЛЕЖНОСТІ ГРАНИЧНОГО КУТА ПІДЙОМУ ЛОТКА ВІД ПАРАМЕТРІВ РЕЖИМУ ВІБРОТРАНСПОРТУВАННЯ |
Мета роботи
Ознайомитись з конструкцією вібраційного лотка-транспортера.
Експериментально визначити граничні кути підйому для різних матеріалів при різних значеннях параметра режиму і побудувати криву
 .
.
Прилади та обладнання
Вібраційний лоток-транспортер з електромагнітним приводом.
Платформа зі змінним кутом нахилу до горизонту, з шкалою кутів нахилу.
Оптичний пристрій для виміру поздовжньої складової амплітуди коливань лотка-транспортера.
Зразки різних матеріалів прямокутної форми.
3.1. Загальні положення
Якщо
лоток (рис. 3.1) коливається за синусоїдальним
законом під деяким кутом до горизонту,
то за певних умов виникає спрямоване
переміщення виробу, що лежить на лотку.
Процес вібраційного переміщення
складається з ряду чергових етапів:
розгону, спільного руху виробу з лотком,
вільного польоту і гальмування.
Кількість і порядок проходження етапів
якісно визначають режим вібраційного
переміщення. Середня швидкість
транспортування виробу
![]() залежить від наступних параметрів:
залежить від наступних параметрів:![]() – амплітуди коливань лотка (
– амплітуди коливань лотка (![]() – нормальна складова;
– нормальна складова;![]() – поздовжня складова);
– поздовжня складова);![]() – кругової частоти коливань (
– кругової частоти коливань (![]() ,
де
,
де![]() – частота коливань, Гц);
– частота коливань, Гц);![]() –
кута нахилу вектора амплітуди коливань
до горизонту;
–
кута нахилу вектора амплітуди коливань
до горизонту;
![]() – кута нахилу лотка до горизонту;
– кута нахилу лотка до горизонту;![]() – коефіцієнта тертя виробу по лотку.
– коефіцієнта тертя виробу по лотку.
Середню
швидкість вібротранспортування виробу
зручно подати у вигляді безрозмірної
величини – коефіцієнта швидкості
![]() ,
що показує, яку часткумаксимальної
швидкості у поздовжньому напрямку лоток
віддає виробу.
,
що показує, яку часткумаксимальної
швидкості у поздовжньому напрямку лоток
віддає виробу.
Коефіцієнт
швидкості
![]() є критерієм ефективності режиму
вібротранспортування: чим ближче
є критерієм ефективності режиму
вібротранспортування: чим ближче![]() до одиниці, тим більш ефективний режим.
Коефіцієнт
до одиниці, тим більш ефективний режим.
Коефіцієнт![]() виражається через деякі параметри, як
лотка так і режиму, що можуть бути подані
у безрозмірній формі.
виражається через деякі параметри, як
лотка так і режиму, що можуть бути подані
у безрозмірній формі.

Рис. 3.1 – Схема переміщення деталі на вібраційному лотку
Коефіцієнт швидкості визначається за формулою:
![]() .
(3.1)
.
(3.1)
Параметр режиму визначається за формулою:
![]() .
(3.2)
.
(3.2)
Параметр
режиму показує, в скільки разів максимальне
значення нормального прискорення
лотка
![]() більше складової прискорення вільного
падіння
більше складової прискорення вільного
падіння![]() у тому самому напрямку. При
у тому самому напрямку. При![]() режими вібропереміщення безвідривні,
при
режими вібропереміщення безвідривні,
при![]() ,
має місце етап вільного польоту виробу
(відривні режими).
,
має місце етап вільного польоту виробу
(відривні режими).
Параметр
![]() показує співвідношення кута кидання
показує співвідношення кута кидання
![]() і кута (коефіцієнта)тертя,
що дозволяє узагальнено розглядати
режими вібротранспортування, і
визначається за формулою:
і кута (коефіцієнта)тертя,
що дозволяє узагальнено розглядати
режими вібротранспортування, і
визначається за формулою:
![]() ,
(3.3)
,
(3.3)
де
![]() .
.
З виразів (3.1) і (3.3) випливає, що:
![]()
![]() .
(3.4)
.
(3.4)
Параметр
![]() показує
співвідношення кута нахилу лотка та
кута (коефіцієнта) тертя і визначається
за формулою:
показує
співвідношення кута нахилу лотка та
кута (коефіцієнта) тертя і визначається
за формулою:
![]() .
(3.5)
.
(3.5)
Для
випадку абсолютно непружного удару
теоретична залежність
![]() зображена графічно на рис. 3.2 і 3.3.
зображена графічно на рис. 3.2 і 3.3.

Рис.
3.2 – Графіки залежності
![]() від
від![]() при деяких значеннях
при деяких значеннях![]()

Рис.
3.3 – Графіки залежності
![]() від
від![]() при зміні
при зміні![]() і постійному значенні
і постійному значенні![]()
З
графіків випливає, що для малих величин
![]() зі збільшенням
зі збільшенням![]() коефіцієнт
коефіцієнт![]() зменшується, асимптотично наближаючись
до деякого постійного значення, яке
збільшується при зменшенні
зменшується, асимптотично наближаючись
до деякого постійного значення, яке
збільшується при зменшенні![]() .
.
Зі
збільшенням
![]() ,
коефіцієнт
,
коефіцієнт![]() починає різко зменшуватись (див. рис.
3.3) і при деякому граничному значенні
починає різко зменшуватись (див. рис.
3.3) і при деякому граничному значенні
![]() коефіцієнт
коефіцієнт
![]() = 0.
= 0.
Це
пояснюється тим, що зі збільшенням кута
![]() (і тим самим
(і тим самим![]() ),
поздовжня складова сила ваги
),
поздовжня складова сила ваги![]() ,
що перешкоджає переміщенню виробу вгору
по лотку, збільшується, а нормальна
складова
,
що перешкоджає переміщенню виробу вгору
по лотку, збільшується, а нормальна
складова![]() – зменшується, зменшуючи при цьому і
силу тертя на етапі розгону (див. рис.
3.1), хоча при цьому і зменшується сила
тертя на етапі гальмування. Однак це
зменшення не може компенсувати збільшення
поздовжньої складової
– зменшується, зменшуючи при цьому і
силу тертя на етапі розгону (див. рис.
3.1), хоча при цьому і зменшується сила
тертя на етапі гальмування. Однак це
зменшення не може компенсувати збільшення
поздовжньої складової![]() ,
спрямованої проти руху виробу, і зменшення
сили тертя на етапі розгону.
,
спрямованої проти руху виробу, і зменшення
сили тертя на етапі розгону.
З
графіків (див. рис. 3.2 і 3.3) випливає, що
внаслідок збільшення
![]() при збільшенні
при збільшенні![]() для фіксованого
для фіксованого![]() значення
значення![]() повинне збільшитися. Але з фізичних
розумінь, при обмеженому значенні
коефіцієнта тертя,
повинне збільшитися. Але з фізичних
розумінь, при обмеженому значенні
коефіцієнта тертя,![]() не може безмежно рости. При значеннях
не може безмежно рости. При значеннях![]() починається ковзання вниз і, отже
починається ковзання вниз і, отже![]() при
при![]() (реально
(реально![]() ).
Тому варто очікувати, що експериментальна
крива залежності
).
Тому варто очікувати, що експериментальна
крива залежності![]() при постійному
при постійному![]() буде зі збільшенням
буде зі збільшенням![]() рости, асимптотично наближаючись до
деякої межі. При цьому, як випливає з
графіківчим
більше
рости, асимптотично наближаючись до
деякої межі. При цьому, як випливає з
графіківчим
більше
![]() ,тим
нижче повинна проходити крива
,тим
нижче повинна проходити крива
![]() .
.