

4.2. Технічні дані робота рф-202м
Робот працює при живленні електрострумом напругою 220 ± 15 В, частотою 50 ± 1 Гц та тиском пневмомережі 0,4–0,6 МПа (4–6 кГ/см2).
Потужність, що споживається роботом від джерел електроживлення – не більше 150 Вт.
Вантажопідйомність кожної руки робота – не більше 2 Н.
Кут між осями установки рук регулюється у межах 0–100º.
Похибка повторення позиціювання при одночасному керуванні за всіма координатами повинна бути не більша 0,05 мм.
Номінальна величина лінійного переміщення кожної руки не менша 200 мм, величина регулювання цього переміщення – 5 мм.
Номінальна величина вертикального переміщення колони не менша 30 мм, величина регулювання цього переміщення – 20 мм.
Номінальна величина повороту кожної руки відносно вертикальної осі – 120º, величина регулювання цього переміщення для МПВ – 0–120º.
Номінальна величина ротації МЗ – 0–90º; 0–180º.
Номінальна величина переміщення МЛД – не менше 12 мм.
Номінальні швидкості переміщення:
лінійного кожної руки – не менше 0,7 м/с (з клапанами швидкого вихлопу);
вертикальної колони – не менше 0,2 м/с;
повороту кожної руки відносно вертикальної осі – не менше 180 град/с;
ротації МЗ – не менше 360 град/с.
Робот перепрограмовується методом навчання шляхом пробного переміщення.
Кількість каналів зв’язку з зовнішнім обладнанням – 7.
Робот забезпечує запис дев’яти програм та можливість переходу з програми на програму за сигналом зовнішнього обладнання або за вибором оператора.
Робот забезпечує програмування часу витримки МЗ в точці від 0 до 9 с, з дискретністю 1 с.
Забезпечується блокування робота за сигналом обладнання.
Робот забезпечує дистанційне керування та видачу контрольної інформації.
Робот забезпечує роботу в режимі наладки.
При вимиканні забезпечується зберігання інформації.
Маса не більше, кг:
маніпулятор автоматичний (МА) – 43;
СУ – 22;
ППП – 5.
21. Габаритні розміри не більше, мм:
МА –
 ;
;СУ –
 ;
;ППП –
 .
.
4.3. Будова та робота системи керування су-202м
СУ призначена для керування роботою РТК в таких режимах роботи.
1. У режимі навчання, СУ забезпечує:
керування та програмування рухом рухомих ланцюгів МА. Максимальна кількість керуючих координат, включаючи МЗ – 11, мінімальна – 1;
видачу та програмування команд на обладнанні. Максимальна кількість одночасно виданих та програмованих команд – 7, мінімальна – 1. Кожен канал забезпечує видачу одної прямої та прийом одної відбитої команди;
програмування часу витримки МЗ в точці в діапазоні від 0 до 9 с, з дискретністю 1 с або від одного до 4,5 с, з дискретністю 0,5 с. Можливе масштабування часу витримки МЗ в межах місткості ЗП;
навчання та запис до 9 програм.
2. У режимі автоматичної роботи СУ забезпечує:
відпрацювання одного кроку програми, записаного в режимі навчання, та перехід до наступного кроку при умові наявності сигналів кінця відпрацювання за координатами, командами, витримками захватів у точці;
циклічне відтворення будь-якої із дев’яти записаних ЗП програм за бажанням оператора або за командами з обладнання;
можливість дистанційного керування та видачу контрольної інформації про стан виробу.
СУ забезпечує можливість візуального контролю інформації, що записується в ЗП при навчанні та викликається з нього в автоматичному режимі. Забезпечує автоматичний пошук програми при переході з режиму навчання в автоматичний режим.
При вмиканні живлення забезпечується автоматичний пошук вільних комірок пам’яті при переході з автоматичного режиму в режим навчання.
Алгоритм роботи СУ. Структурна схема алгоритму роботи наведена на рис. 4.2.

Рис. 4.2 – Структурна схема алгоритму роботи СУ
Алгоритм роботи СУ можна розбити на ряд часткових алгоритмів, за якими він працює в залежності від режиму роботи. Система автоматичного керування (САК) реалізує наступні режими роботи: навчання і автоматичної роботи.
Алгоритм навчання реалізується технологічною програмою. У цьому випадку на СУ встановлюється режим навчання та номер програми. При переході в режим навчання автоматично знаходиться вільне слово в ЗП, з якого починається навчання. Оператор записує в ЗП вихідне положення координат МА, вихідні команди на обладнання. Далі оператор за допомогою органів керування координатами переміщує координати в наступну точку, необхідну для виконання деякої операції та записує перехід програми. Після цього процес навчання закінчується.
У режимі навчання інформація про перехід, набрана на панелі керування (вузол завдання програми), надходить на вузол навчання, вузол обробки режимів роботи та формується в слово. Структура слова наведена на рис. 4.3.

|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
Рис. 4.3 – Структура слова
У залежності від ознаки слова, що записується в 23-му розряді, слова можуть бути двох типів:
– адресне (ознака слова дорівнює 1)
– координуюче (ознака слова дорівнює 0).
Адреса не визначає масив програми. Координуючі слова складають масив програми. Значення керуючих координат, відповідні 1–11-му розрядам слова наведені у таблиці 4.1.
Таблиця 4.1
|
Номер розряду |
Значення розряду |
Координата |
Примітка |
|
1 |
2 |
3 |
4 |
|
1 |
1 |
МГП лівий – назад |
датчик |
|
0 |
МГП – вперед |
датчик | |
|
2 |
1 |
МГП – поворот вліво |
датчик |
|
0 |
МГП – поворот вправо |
датчик |
Продовження таблиці 4.1
|
1 |
2 |
3 |
4 |
|
3 |
1 |
МЛД1 вгору |
час |
|
0 |
МЛД1 вниз |
час | |
|
4 |
1 |
МГП – ротація вліво |
час |
|
0 |
МГП – ротація вправо |
час | |
|
5 |
1 |
МЗ затиснутий |
час |
|
0 |
МЗ розтиснутий |
час | |
|
6 |
1 |
МГП правий – назад |
датчик |
|
0 |
МГП вперед |
датчик | |
|
7 |
1 |
МГП – поворот вліво |
датчик |
|
0 |
МГП – поворот вправо |
датчик | |
|
8 |
1 |
МЛД2 вгору |
час |
|
0 |
МЛД2 вниз |
час | |
|
9 |
1 |
МГП – ротація вліво |
час |
|
0 |
МГП – ротація вправо |
час | |
|
10 |
1 |
МЗ затиснутий |
час |
|
0 |
МЗ розтиснутий |
час | |
|
11 |
1 |
Модуль підйому – вниз |
датчик |
|
0 |
Модуль підйому – вгору |
датчик |
Формат та вигляд програми наведені на рис. 4.4.
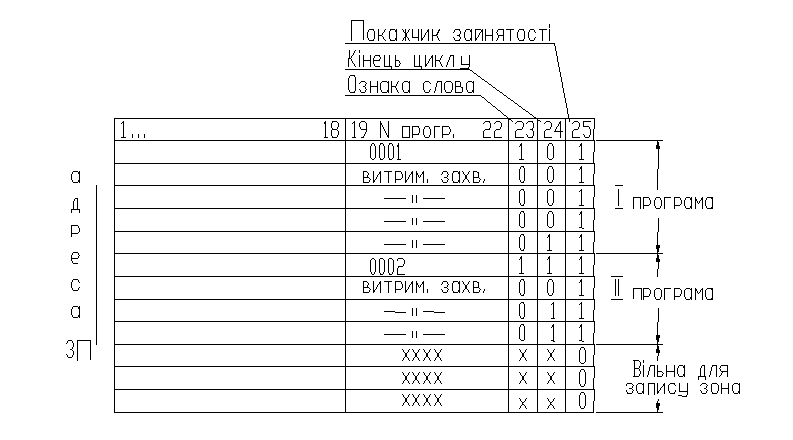
Рис. 4.4 – Формат та вигляд програми
Код слова з 1 по 11-й розряд (координати) формується у вузлі навчання. Код слова з 12 по 18-й розряд (команди) формується у вузлі обробки режимів різання.
Код слова з 19 по 22-й розряд формується у вузлі навчання 2. Тут же формуються службові ознаки – ознака слова (23-й розряд), кінець циклу (24-й розряд), покажчик зайнятості (25-й розряд).
Для зменшення кількості міжплатних з’єднань обмін інформацією між вузлами, які формують слово при навчанні та ЗП, що видають інформацію при переході в режим автоматичної роботи, здійснюється за єдиною інформаційною магістраллю, що реалізується на елементах з відкритим колектором.
Сформований код у вузлі навчання надходить у модуль пам’яті і на вузол координат та після посилення поступає на електропневматичні клапани МА. Сформований у вузлі обробки режимів роботи, код числа 12–18-го розрядів надходить на вузол видачі команд, посилюється та подається на вузол реле команд.
Перед навчанням ЗП знищується одночасним натисканням кнопок “СТИРАНИЕ” та “ЗАПИСЬ”, на початку навчання оператор натискує кнопку “Начало цикла” на панелі керування (вузол завдання програми) та вузол навчання 2 формує в 19–22-му розрядах номер вивченої програми та ознаку слова, яка дорівнює 1 в 23-му розряді. При натисканні кнопки “ЗАПИСЬ” сформоване слово записується в модулі пам’яті. Наступне навчання проводиться без натискання кнопки “Начало цикла” та в 19–22-му розрядах записується витримка МП в точці. При навчанні останнього переходу оператор натискує кнопку “Конец цикла” та вузол навчання 2 формує в 24-му розряді ознаку кінця циклу (дорівнює 1).
У автоматичному режимі роботи інформація обчислюється із ЗП та надходить на відповідні вузли СУ.
Алгоритм автоматичної роботи. Для переводу СУ в автоматичний режим оператор вмикає на панелі кнопку “АВТОМАТ”. При цьому СУ автоматично знаходить в ЗП програму, запрошену обладнанням. У випадку, якщо обладнання не запитує жодну з програм, записаних в пам’яті СУ, шукається програма, задана на панелі керування. Пошук програми в ЗП відбувається наступним чином: опитуються всі записані слова ЗП до збігу ознак адресного слова та номера програми заданому. Адреса слова з заданим номером програми запам’ятовується для циклічного відтворення програми.
Команда закінчення відпрацювання кадру (одного переходу) програми визначається закінченням відпрацювання складових його координат та команд витримки. Команду закінчення відпрацювання за координатами, виконує вузол порівняння та вузол відпрацювання орієнтовних координат. Команду закінчення відпрацювання кадру виробляє вузол відпрацювання команд. Команду закінчення відпрацювання витримки виробляє вузол адреси, в якому знаходиться програмований таймер.
Сигнал кінця відпрацювання частин кадру надходить у вузол відпрацювання програми. Якщо у відпрацьованому кадрі не була записана ознака кінця циклу, то проводиться опитування із модуля пам’яті наступного кадру.
Якщо у відпрацьованому кадрі була записана ознака кінця кадру, то після його відпрацювання у вузлі вибору програми відбувається аналіз сигналів обладнання на запитання програми. У результаті аналізу програма або відпрацьовується ще раз або вузол відпрацювання програми запускає вузол пошуку програми для пошуку у ЗП програми, запитаної обладнанням.