

Остаточный дисбаланс
После балансировки рабочего колеса из-за погрешностей измерений и неточности устройств сохраняется смещение центра масс, которое называется остаточным статическим дисбалансом. Для рабочих колес вращающихся механизмов нормативная документация задает допустимый остаточный дисбаланс. Например, для колеса сетевого насоса 1Д1250 - 125 задается остаточный дисбаланс 175 г х см (ТУ 34 - 38 - 20289 - 85).
Приспособления для статической балансировки
Н

Рис.49. Статическая балансировка на параллельных призмах
Простейшим устройством для статической балансировки являются ножи, или призмы (рис. 49), установленные строго горизонтально и параллельно. Отклонение от горизонта в плоскостях параллельной и перпендикулярной оси колеса, не должно превышать 0,1 мм на 1 м. Средством проверки может служить уровень «Геологоразведка 0,01» или уровень соответствующей точности. Колесо одевается на оправку, имеющую опорные шлифованные шейки (в качестве оправки можно использовать вал, заранее проверив его точность). Параметры призм из условий прочности и жесткости для колеса массой 100 кг и диаметром шейки оправки d = 80 мм составят: рабочая длинна L = p X d = 250 мм; ширина –около 5 мм; высота – 50 – 70 мм.
Если дать колесу возможность свободно перекатываться по ножам, то после остановки центр масс колеса займет положение, не совпадающее с нижней точкой из-за трения качения. При вращении колеса в противоположную сторону после остановки оно займет другое положение. Среднее положение нижней точки соответствует истинному положению центра масс. Для статической балансировки часто применяют дисковые устройства (рис. 50). Они не требуют точной горизонтальной установки, как ножи, и на диски (ролики) можно устанавливать роторы с разными диаметрами цапф. Точность определения центра масс меньше из-за дополнительного трения в подшипниках качения роликов.

Рис. 50. Статическая балансировка на дисковых устройствах
Применяются устройства для статической балансировки роторов в собственных подшипниках. Для снижения трения в них, которое определяет точность балансировки, применяют вибрацию основания или вращение наружных колец опорных подшипников в разные стороны.
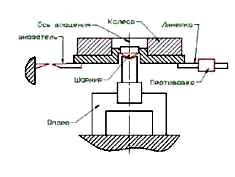
Рис.51. Балансировочные весы
Самым точным и в то же время сложным устройством статической балансировки являются балансировочные весы (рис. 51). Конструкция весов для рабочих колес приведена на рисунке. Колесо устанавливают на оправку по оси шарнира, который может качаться в одной плоскости. При повороте колеса вокруг оси в различных положениях его уравновешивают противовесом, по величине которого находят место и дисбаланс колеса.
Методы статической балансировки
Величину дисбаланса, или количество граммов корректирующей массы, определяют следующими способами.
1. метод подбора – установка противовеса в точке противоположной центру масс добиваются равновесия колеса в любых положениях;
2. метод пробной массы Мп – Мп устанавливают под прямым углом к «тяжелой точке», при этом ротор совершит поворот на угол j.
Корректирующую массу вычисляют по формуле:
![]()
или определят по номограмме (рис. 52): через точку, соответствующую пробной массе на шкале Мп, и точку, соответствующую углу отклонения от вертикали j, проводят прямую, пересечение которой с осью Мк дает величину корректирующей массы.
В качестве пробной массы можно использовать магниты или пластилин.

Рис. 52. Определение величины дисбаланса по номограмме
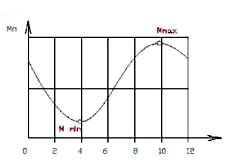
Рис.53. Определение величины дисбаланса по диаграмме
3. метод кругового обхода – самый подробный и наиболее точный, но и наиболее трудоемкий. Он применим и для тяжелых колес, где большое трение мешает точно определить место дисбаланса. Поверхность ротора делят на двенадцать или более равных частей и последовательно в каждой точке подбирают пробную массу Мп, которая приводит ротор в движение. По полученным данным строят диаграмму (рис. 53) зависимости Мп от положения ротора. Максимум кривой соответствует «легкому» месту, куда необходимо установить корректирующую массу:
![]() .
.