

2.2.1 Дискретна передаточна функція безперервної частини
Основною засадою у визначенні дискретної передаточної функції безперервної частини є вибір періоду дискретизації за допомогою теореми Котельникова, яка дозволяє відповісти на питання, як за допомогою одиничних імпульсів передати без спотворення інформацію, що міститься в безперервному сигналі, і яка при цьому повинна бути частота проходження імпульсів.
Згідно
цій теоремі, безперервна функція
![]() ,
наприклад, сигнал задавання
,
наприклад, сигнал задавання![]() ,
частотний спектр якого обмежений
частотами від
,
частотний спектр якого обмежений
частотами від![]() до
до![]() ,
повністю відтворюється дискретним
сигналом
,
повністю відтворюється дискретним
сигналом![]() ,
якщо задовольняється умова
,
якщо задовольняється умова![]() або
або![]() ,
с. Фізичний сенс такого ствердження
визначається тим, що неперервна функція,
яка не містить у своєму спектрі частот,
що перевищують
,
с. Фізичний сенс такого ствердження
визначається тим, що неперервна функція,
яка не містить у своєму спектрі частот,
що перевищують![]() ,
не може помітно змінитися за проміжок
часу
,
не може помітно змінитися за проміжок
часу![]() ,
рівний половині періоду найбільшої
частоти
,
рівний половині періоду найбільшої
частоти![]() .
.
Таким чином, період дискретизації дорівнює:
|
|
Наступним
кроком синтезу дискретної системи є
перетворення передаточної функції
безперервної частини системи управління
в імпульсну, використовуючи програму
Mathcad. Для цього необхідно
отримати решітчасту функцію шляхом
застосування зворотного перетворення
Лапласа і заміни змінної
![]() добутком
добутком![]() .
Після цього до решітчастої функції
застосовується
.
Після цього до решітчастої функції
застосовується![]() -
перетворення, в результаті передаточна
функція безперервної частини системи
в
-
перетворення, в результаті передаточна
функція безперервної частини системи
в![]() -
формі має вигляд:
-
формі має вигляд:
|
|
2.2.2 Дискретна передаточна функція корегуючої ланки
Аналогом
розрахованої раніше безперервної
корегуючої ланки в дискретній системі
є ЦОМ. Для визначення її передаточної
функції необхідно перетворити передаточну
функцію корегуючого пристрою в
![]() -
форму, використовуючи описану вище
методику.
-
форму, використовуючи описану вище
методику.
Таким чином, передаточна функція ЦОМ має вигляд:
|
|
Враховуючи,
що передаточна функція ЦОМ
![]() є відношенням зображень вихідної і
вхідної величин, узятих в цифровій
формі, то отримаємо вираз:
є відношенням зображень вихідної і
вхідної величин, узятих в цифровій
формі, то отримаємо вираз:
|
|
 .
.
Отже,
розділивши чисельник і знаменник на
![]() отримаємо
отримаємо
|
|
На
підставі знайденої функції
![]() можна отримати закон управління, ЦОМ,
що реалізується, у вигляді рекурентного
різницевого рівняння. Для цього необхідно
перейти від передаточної функції ЦОМ
до оригіналів, в результаті отримаємо:
можна отримати закон управління, ЦОМ,
що реалізується, у вигляді рекурентного
різницевого рівняння. Для цього необхідно
перейти від передаточної функції ЦОМ
до оригіналів, в результаті отримаємо:
|
|
де
![]()
![]() .
.
Таким чином, закон управління має вигляд:
|
|
Дане
рівняння відіграє роль алгоритму роботи
ЦОМ, що є дискретним фільтром з передаточною
функцією
![]() .
.
2.2.3 Дискретна передаточна функція замкнутої системи
Загальна дискретна передаточна функція розімкненої системи знаходиться, використовуючи наступну формулу:
|
|
Дана формула застосовується, оскільки дискретний фільтр та екстраполятор розділені ключовим елементом.
Тоді дискретна передаточна функція замкнутої системи матиме вигляд:
|
|
2.2.4 Аналіз синтезованої дискретної системи
Раніше зазначалося, що якісний аналіз спроектованої суднової автоматичної системи починається з визначення стійкості системи.
Стійкість
замкнутою цифрової САС визначається
видом коренів характеристичного
рівняння. У стійкій цифровій системі
корені характеристичного рівняння
![]() повинні лежати усередині
кола одиничного радіусу, тобто бути по
модулю менше одиниці.
повинні лежати усередині
кола одиничного радіусу, тобто бути по
модулю менше одиниці.
У даному прикладі курсової роботи корені характеристичного рівняння дорівнюють:
|
|
Модуль кожного кореня менше одиниці, отже, дискретна САС стійка.
Наступним етапом аналізу синтезованої системи є визначення якісних показників за виглядом перехідного процесу.
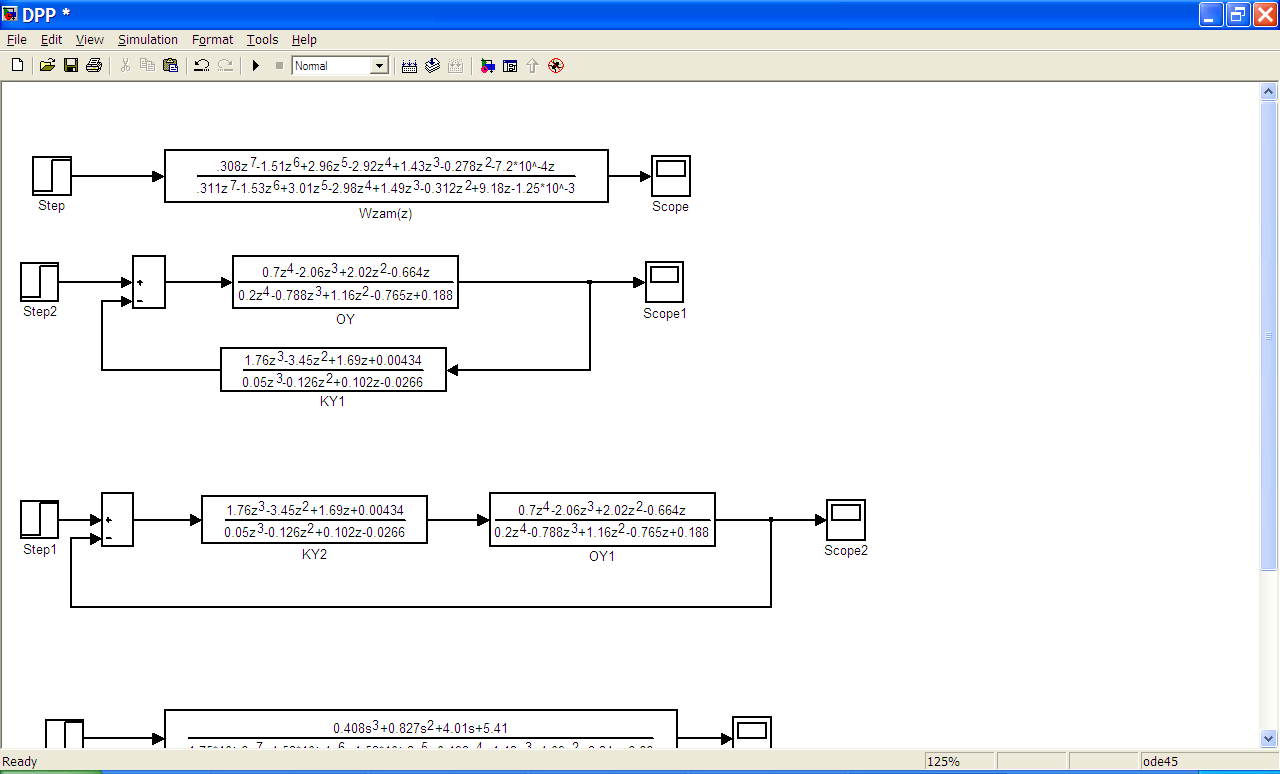
Графік перехідного процесу може бути отриманий шляхом моделювання системи в програмі MATLAB (пакет Simulink) (рис. 25, 26).
|
|
|
Рис. 25 – Структурна схема моделювання дискретної системи управління |
|
|
|
Рис. 26 – Графік перехідного процесу в замкнутій дискретній системі |
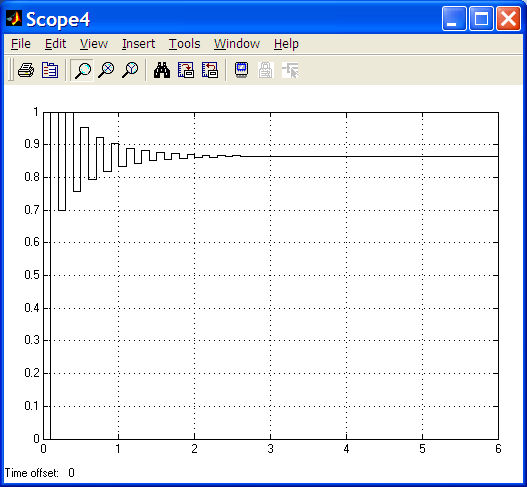
За графіком перехідного процесу можна визначити параметри, що характеризують якість процесу управління, а саме:
1) час
регулювання:
![]() .
.
Значення даного параметра задовольняє технічному завданню.
2)
максимальне перерегулювання динамічної
системи:
![]() .
.
Отримане значення перерегулювання повністю задовольняє технічному завданню і має запас по чисельному значенню.