

II. Практична частина. Приклад виконання курсової роботи
2.1 Синтез лінійної безперервної частини системи управління
Розглянемо розрахунок динамічної системи автоматичного управління із заданими показниками якості на конкретному прикладі.
Нехай структурна схема суднової системи управління має вигляд:
|
|
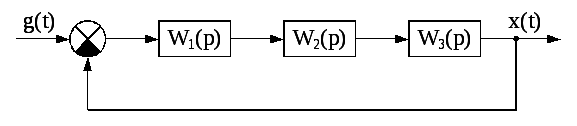
Передаточні функції структурних елементів суднової системи управління:
![]()
Значення параметрів системи:
![]()
Задані якісні показники системи:
![]()
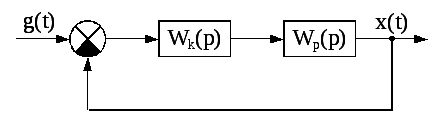
Необхідно розрахувати корегуючий пристрій, що забезпечував би заданій судновій системі управління, необхідні якісні показники. Виходячи з цього, структурна схема проектованої суднової системи управління матиме вигляд:
|
|
2.1.1 Приведення структурної схеми до робочого вигляду
У
початковій структурній схемі слід
замінити кожен коефіцієнт
![]() його конкретним виглядом, відповідно
до завдання. Така структурна схема
вважатиметься базовою при виконанні
першої частини роботи.
його конкретним виглядом, відповідно
до завдання. Така структурна схема
вважатиметься базовою при виконанні
першої частини роботи.
Разом з базовою структурною схемою буде необхідна інша, яка береться за робочу, вона матиме вигляд:
|
|
|
Рис. 12 – Робоча структурна схема |
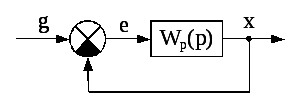
Де
![]() − передаточна функція розімкненої
системи. Перехід від початкової
структурної схеми до робочої здійснюється
шляхом застосування правил структурних
перетворень.
− передаточна функція розімкненої
системи. Перехід від початкової
структурної схеми до робочої здійснюється
шляхом застосування правил структурних
перетворень.
Розглянемо розімкнену систему:
|
|
|
Рис. 13 – Розімкнена початкова схема |

Таким чином, передаточна функція розімкненої системи відповідно до правил структурних перетворень має вигляд:
|
|
Робоча структурна схема системи і канонічний запис передаточної функції розімкненої системи є початковою для подальших розрахунків частотним методом.
Передаточна функція замкнутої системи управління відповідно до робочої структурної схеми має вигляд:
|
|
За коренями характеристичного рівняння (знаменника отриманої передаточної функції) можна визначити стійкість початкової нескорегованої системи.
Так корені знаменника:
|
|
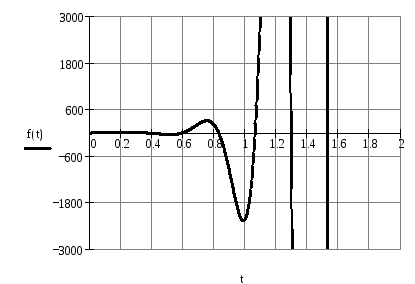
Оскільки два уявні корені знаменника мають дійсну частину більше нуля (останні менше нуля), то початкова нескорегована система є нестійкою. Нестійкість початкової системи показує і побудований в програмі Mathcad графік перехідного процесу (рис. 14).
2.1.2. Побудова ЛАЧХ початкової системи автоматичного управління.
За канонічним видом передаточної функції можна визначити зразковий вид логарифмічної амплітудно-частотної характеристики (ЛАЧХ). Для цього необхідно знайти коефіцієнт підсилення і постійні часу з виразу для передаточної функції розімкненої системи (2.1.1).
|
|
|
Рис. 14 – Вид перехідного процесу в початковій (нескорегованій) замкнутій системі |
Частоти,
що сполучаються, визначаються із
співвідношення
![]() :
:
|
|
Коефіцієнт
підсилення на частоті
![]() дорівнюватиме:
дорівнюватиме:
|
|
Перед побудовою ЛАЧХ слід вибрати і розмістити систему координат. Тут потрібно мати на увазі наступне:
1) по осі ординат розбиття йде рівномірно, в децибелах:
0 дБ, 20 дБ, 40 дБ − вгору і -20 дБ, -40 дБ ... – вниз.
2) по осі абсцис розбиття йде логарифмічне, але оцифрування в звичайному вигляді: ...0,1 c-1, 1 с-1, 10 с-1, 100 с-1 і так далі.
3) початок осі координат рекомендується помістити в точку, віддалену на 3-4 декади ліворуч від самої найменшої частоти, що сполучає (яка відповідає максимальній постійній часу в канонічному записі передаточної функції розімкненої системи).
4) при побудові фазової характеристики вісь абсцис залишається тією ж самою, вісь ординат з початку системи координат прямує вниз, розбиття її рівномірне в градусах (від’ємних): 0 град, -90 град, -180 град і так далі.
Підставимо
в передаточну функцію
![]() і запишемо
її у вигляді:
і запишемо
її у вигляді:
|
|
Побудова ЛАЧХ проводиться наступним чином:
На
частоті
![]() відкладаємо
значення 20
lg
(250)
=
48 дБ
та через цю точку проводимо пряму з
нахилом
відкладаємо
значення 20
lg
(250)
=
48 дБ
та через цю точку проводимо пряму з
нахилом ![]() ,
до частоти
,
до частоти
![]() .
Далі проводимо пряму з нахилом
.
Далі проводимо пряму з нахилом
![]() ,
що відповідає ланці
,
що відповідає ланці
![]() до частоти
до частоти
![]() .
Далі пряма з нахилом
.
Далі пряма з нахилом
![]() ,
що відповідає ланці
,
що відповідає ланці
![]() .
Далі пряма з нахилом
.
Далі пряма з нахилом
![]() ,
що відповідає ланці
,
що відповідає ланці
![]() .
.
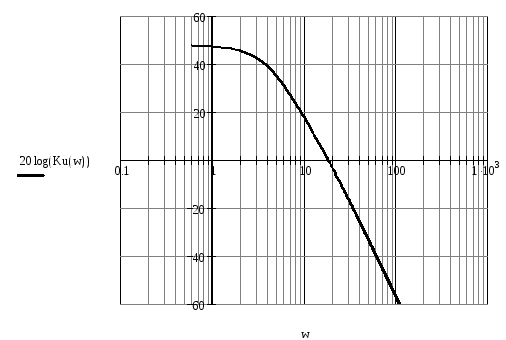
Вид ЛАЧХ, побудованої в програмі Mathcad за канонічним виглядом передаточної функції, представлений на рис. 15.
Передаточна функція нескорегованої системи в канонічній формі має вигляд:
|
|
|
|
|
Рис. 15 – ЛАЧХ початкової нескорегованої САУ |
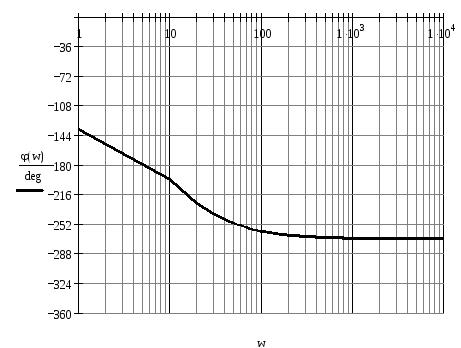
Тоді фазова характеристика системи управління визначається за допомогою формули:
|
|
Таким чином, отримаємо:
|
|
|
|
|
Рис. 16 – Логарифмічна фазо-частотна характеристика нескорегованої САУ |
2.1.3 Побудова бажаної ЛАЧХ САУ
Найбільш відповідальним етапом синтезу корегуючого пристрою є етап побудови бажаної ЛАЧХ. Він заснований на зв’язку перехідного процесу з дійсною частотною характеристикою замкнутої системи і ЛАЧХ розімкненої системи.
Для вибору корегуючих пристроїв за заданими показниками якості перехідного процесу необхідно мати в своєму розпорядженні частотні характеристики, які повинні бути побудовані відповідно до вимог, пред’явлених до динамічних властивостей системи. Процес побудови бажаних частотних характеристик в значній мірі спрощується, якщо існують залежності, що встановлюють зв’язок між основними параметрами частотних характеристик, з одного боку, і показниками якості процесу регулювання – з іншого. У довідковій літературі [3], [16] представлені характеристики часу регулювання і перерегулювання (рис. 8).
Сполучаючі
частоти, що визначають тривалість
середньочастотної ділянки, знаходяться
виходячи із заданого запасу стійкості,
який встановлюється за
![]() ,
виходячи з побудованого довідкового
графіка.
,
виходячи з побудованого довідкового
графіка.
Виходячи
із заданої величини перерегулювання
![]() за номограмою (рис. 7, а) визначається
за номограмою (рис. 7, а) визначається
![]() і співвідношення для
і співвідношення для
![]() .
За відомим заданим часом регулювання
.
За відомим заданим часом регулювання
![]() можна визначити мінімальну циклічну
частоту
можна визначити мінімальну циклічну
частоту
![]() :
:
|
|
За
відомим співвідношенням визначається
частота зрізу
![]() :
:
|
|
Отримані величини дозволяють побудувати низькочастотну і середньочастотну частини бажаної ЛАЧХ (БЛАЧХ). Виберемо злами БЛАЧХ на рівні 0.394 с-1 та 188.049 с-1. Таким чином, складові частини БЛАЧХ мають нахил 0 : -20 : -80 дБ/ дек.
Виходячи з властивості логарифмічної функції:
|
|
ЛАЧХ корегуючого пристрою може бути отримана за наступним виразом:
|
|
ЛАЧХ корегуючого пристрою, має нахили 0:-20:0:+40:+60:0 дБ/ дек. Всі характеристики будуються для розімкненої динамічної системи управління.
|
|
|
Рис. 17 – Графічне зображення ЛАЧХ початкової системи, БЛАЧХ і ЛАЧХ корегуючої ланки |
