

3. Слідкуюча система управління курсом судна з електромеханічним приводом
|
|
|
Рис. – Структурна схема слідкуючої системи управління курсом судна з електромеханічним приводом |

Об’єктом
управління в даній САС є руль; вхідна
величина – заданий кут повороту пера
руля
![]() ,
вихідна величина – реальний кут повороту
руля
,
вихідна величина – реальний кут повороту
руля
![]() .
.
Основні елементи системи та їх передаточні функції:
-
1.
ЛОТК1 − лінійний обертовий трансформатор курсу
 ;
;2.
ЛОТР2 − лінійний обертовий трансформатор руля
 ;
;3.
ЕГЗЗ − елемент гнучкого зворотного зв’язку
 ;
;4.
ЕЖЗЗ − елемент жорсткого зворотного зв’язку
 ;
;5.
МП − магнітний підсилювач
 ;
;6.
ЕМП − електромашинний підсилювач
 ;
;7.
ВД − виконавчий двигун
 .
.
Таблиця – Числові значення коефіцієнтів передаточних функцій та необхідні показники якості
|
Шифр завдання |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3.1 |
0,6 |
0,6 |
0,0005 |
0,003 |
160 |
4,7 |
0,05 |
0,015 |
0,074 |
0,375 |
5 |
20 |
20 |
|
3.2 |
0,5 |
0,4 |
0,0004 |
0,006 |
150 |
4,2 |
0,04 |
0,021 |
0,063 |
0,338 |
5 |
22 |
19 |
|
3.3 |
0,4 |
0,5 |
0,0006 |
0,004 |
140 |
4,9 |
0,06 |
0,011 |
0,058 |
0,48 |
5 |
20 |
18 |
|
3.4 |
0,6 |
0,5 |
0,0007 |
0,005 |
170 |
5,1 |
0,07 |
0,019 |
0,082 |
0,455 |
5 |
21 |
20 |
|
3.5 |
0,5 |
0,6 |
0,0005 |
0,002 |
130 |
5,4 |
0,08 |
0,027 |
0,066 |
0,346 |
5 |
23 |
19 |
|
3.6 |
0,7 |
0,8 |
0,0008 |
0,003 |
140 |
4,5 |
0,05 |
0,032 |
0,051 |
0,431 |
5 |
22 |
18 |
4. Слідкуюча система керування антеною релейно-локаційної станції (рлс) із сельсиновим вимірювальним пристроєм
|
|
|
Рис. – Структурна схема слідкуючої системи керування антеною РЛС із сельсиновим вимірювальним пристроєм |
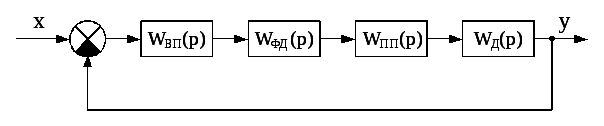
Об’єктом
управління в даній САС є антена РЛС;
вхідна величина – кут повороту
сельсин-датчика
![]() ,
вихідна величина – кут повороту антени
,
вихідна величина – кут повороту антени
![]() .
.
Основні елементи системи та їх передаточні функції:
-
1.
ВП − вимірювальний пристрій-сельсин
 ;
;2.
ФД − фазовий детектор
 ;
;3.
ПП − підсилювач потужності
 ;
;4.
Д − двигун
 .
.
Таблиця – Числові значення коефіцієнтів передаточних функцій та необхідні показники якості
|
Шифр завдання |
|
|
|
|
|
|
|
|
|
|
4.1 |
2,2 |
1,57 |
4 |
0,207 |
1,15 |
0,158 |
5 |
2 |
18 |
|
4.2 |
2,3 |
1,63 |
4,5 |
0,311 |
1,22 |
0,375 |
5 |
3 |
19 |
|
4.3 |
2,4 |
1,46 |
5,5 |
0,26 |
1,18 |
0,214 |
5 |
4 |
20 |
|
4.4 |
2,28 |
1,81 |
5 |
0,342 |
1,28 |
0,226 |
5 |
2,5 |
18 |
|
4.5 |
2,37 |
1,54 |
6 |
0,46 |
1,3 |
0,344 |
5 |
3,5 |
19 |
|
4.6 |
2,49 |
1,62 |
6,5 |
0,248 |
1,34 |
0,166 |
5 |
4,5 |
20 |