

1.4 Корегуючі пристрої
Корегуючі пристрої (КП) – це пристрої, які вводять в САС для поліпшення якості управління, для зміни (корекції) її характеристик. До корегуючих пристроїв, призначених для поліпшення динамічних властивостей САС, відносяться елементи, що характеризуються передаточними функціями диференціюючих ланок.
Вибір і розрахунок систем корекції складає головний зміст динамічного розрахунку САС. Він здійснюється методом аналізу або синтезу. Вибір КП методом аналізу зводиться до послідовного поліпшення динамічних властивостей системи. Вибір КП методом синтезу здійснюється безпосередньо з умов отримання необхідного перехідного процесу. На практиці методи аналізу і синтезу органічно доповнюють один одного.
Введення в закон управління сигналів, пропорційних похідним, дозволяє забезпечити необхідні якості САС (потрібні швидкодія і запаси стійкості) як в перехідному (динамічному), так і в сталому режимі, а також додати системі стабілізуючі властивості.
Введенням
в закон управління інтегралів досягається
необхідний порядок астатизму з метою
забезпечення у системі необхідних
величин помилок
![]() і
і![]() .
.
Корегуючі пристрої в коло одноконтурної САС можуть бути включені послідовно або паралельно.
При введенні послідовних корегуючих кіл в САС необхідно оцінювати їх позитивні і негативні сторони. Введення таких кіл є зручним, зважаючи на простоту і наочність формування управляючих дій, а, отже, порівняльної простоти їх вибору і розрахунку. Це пояснюється тим, що послідовні корегуючі кола вводяться в прямий тракт підсилення і перетворення управляючого сигналу і там, де це виявляється можливим за умовами фільтрації сигналу від перешкод, вони з успіхом виконують своє завдання.
Паралельні корегуючі кола застосовують тоді, коли потрібно здійснити складний закон управління з введенням похідних і інтегралів від сигналу помилки. Паралельне включення інтегруючих і диференціюючих корегуючих кіл дозволяє підвищити точність роботи каналу управління без значного зниження його запасу стійкості.
Для введення в закон управління сигналів, пропорційних похідним та інтегралам, застосовують різні за конструктивним виконанням і фізичними основами пристрої. Корегуючі пристрої, діляться на активні і пасивні. До активних відносяться диференціюючі та інтегруючі гіроскопи, гіротахоакселерометри, операційні підсилювачі, тахогенератори, сервомотори, до пасивних – різного роду пасивні чотириполюсники, звані в теорії САС корегуючими колами.
Пристрої
пасивного типу не містять джерел енергії,
потужність вихідного сигналу у них
менша, ніж потужність вхідного. У САС
найбільш широке застосування отримали
корегуючі пристрої у вигляді пасивних
кіл, що складаються з різних з’єднань
активних опорів
![]() ,
ємностейС,
індуктивностей
,
ємностейС,
індуктивностей
![]() (кіл
(кіл
![]() або
або![]() ).
Пасивними
корегуючими колами є чотириполюсники,
вихідна напруга яких з певною точністю
пропорційна похідній (похідним) або
інтегралу від вхідної напруги. Пасивні
корегуючі кола можуть працювати на
постійному і змінному струмі. Це важливо,
оскільки рід струму істотним чином
впливає на точність роботи, технічну
реалізацію пристроїв, на вигляд
характеристик. Найбільшого поширення
в схемах САС набули корегуючі кола
постійного струму завдяки їх великій
точності і стійкості.
).
Пасивними
корегуючими колами є чотириполюсники,
вихідна напруга яких з певною точністю
пропорційна похідній (похідним) або
інтегралу від вхідної напруги. Пасивні
корегуючі кола можуть працювати на
постійному і змінному струмі. Це важливо,
оскільки рід струму істотним чином
впливає на точність роботи, технічну
реалізацію пристроїв, на вигляд
характеристик. Найбільшого поширення
в схемах САС набули корегуючі кола
постійного струму завдяки їх великій
точності і стійкості.
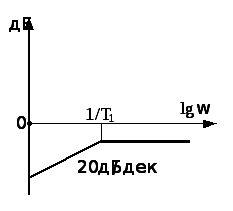
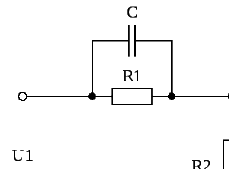
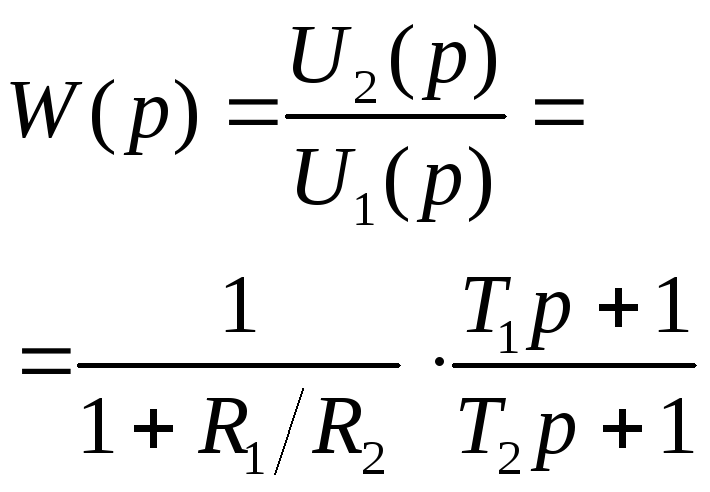
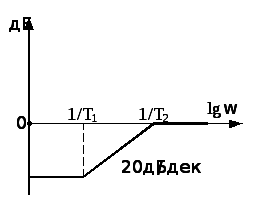
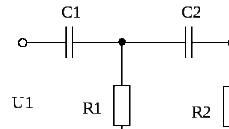
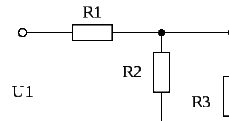
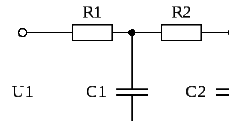
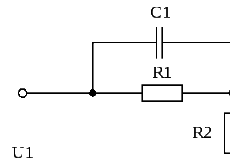
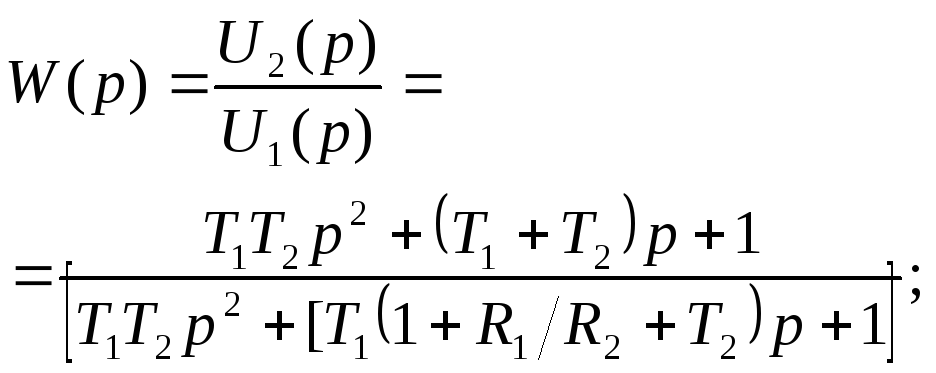
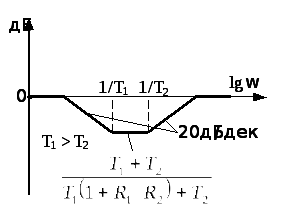
На практиці для корекції САС використовують різноманітні схеми пасивних корегуючих кіл; деякі з них наведено в таблиці 2.
Для зміни властивостей ланки або сукупності ланок в системах управління разом з послідовними і паралельними корегуючими пристроями широко застосовуються зустрічно-паралельні корегуючі кола у вигляді різного роду місцевих зворотних зв’язків, а також їх комбінації [12].
Таблиця 2 – Основні схеми пасивних корегуючих кіл
|
Схеми пасивних корегуючих контурів |
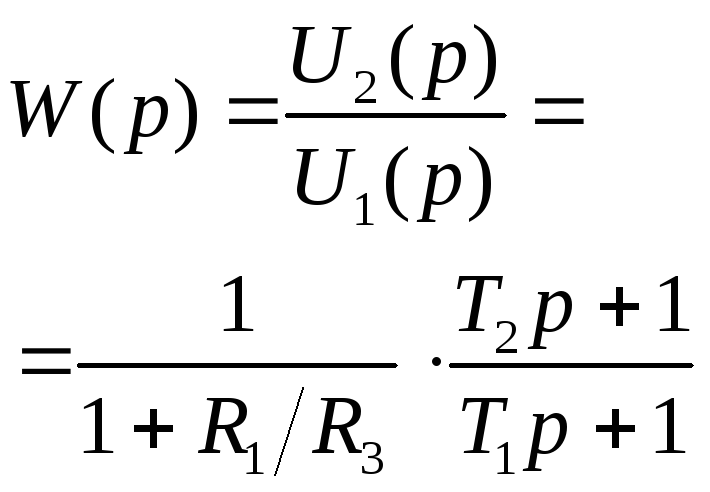
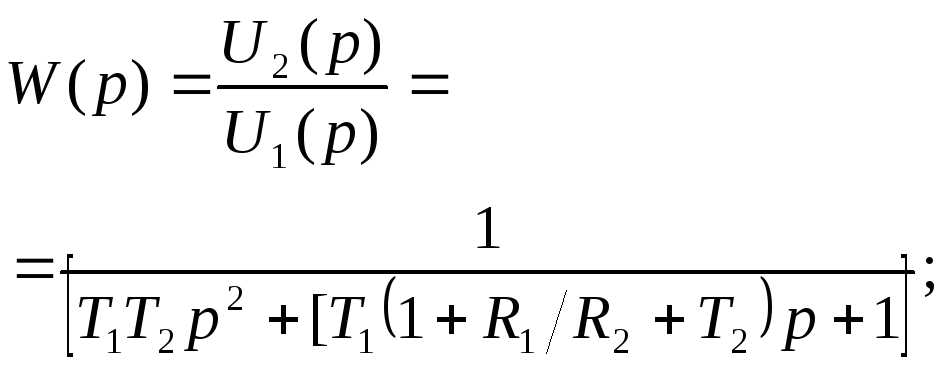
Передаточна функція |
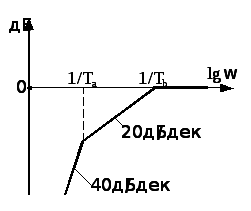
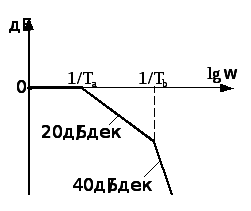
Логарифмічна амплітудна асимптотична характеристика |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

 ;
;

 ;
;
 ;
;
Перетворення динамічних властивостей ланки або кола ланок при обхваті зворотним зв’язком проводиться відповідно до формули:
|
|
де
![]() −передаточна
функція ланки зворотного зв’язку.
Залежно від виду передаточної функції
−передаточна
функція ланки зворотного зв’язку.
Залежно від виду передаточної функції
![]() зворотні зв’язки діляться на жорсткі
(ЖЗЗ)
і гнучкі
(ГЗЗ).
Прикладом використання жорсткого і
гнучкого зворотних зв’язків може
служити слідкуюча система управління
кермом з електромеханічним приводом.
зворотні зв’язки діляться на жорсткі
(ЖЗЗ)
і гнучкі
(ГЗЗ).
Прикладом використання жорсткого і
гнучкого зворотних зв’язків може
служити слідкуюча система управління
кермом з електромеханічним приводом.
При жорсткому зворотному зв’язку сигнал з виходу охоплюваної ланки (кола ланок) діє постійно (жорстко) як в перехідному, так і в сталому режимі. При гнучкому зворотному зв'язку сигнал з виходу охоплюваної ланки (кола ланок) діє вибірково (гнучко) в перехідному і сталому режимах. Зазвичай в якості ГЗЗ використовують диференціюючі та інтегруючі кола.
Для корекції в системах управління застосовують переважно від’ємні зворотні зв’язки. Додатні зворотні зв’язки використовують лише в елементах САС для збільшення коефіцієнта підсилення або зменшення постійної часу (наприклад, в магнітному підсилювачі).