I. Теоретична частина
При управлінні яким-небудь процесом вручну людина-оператор здійснює наступні функції:
1) стежить за ходом процесу, спостерігаючи за допомогою вимірювальних приладів або безпосередньо за зміною параметра, що характеризує його (або ряду параметрів);
2) порівнюючи дійсне значення цього параметра з його заданим значенням, визначає величину і знак відхилення;
3) відповідно до відхилення, що утворилося, за допомогою якого-небудь пристрою впливає на процес так, щоб усунути це відхилення.
Управління, здійснюване без участі людини, називається автоматичним управлінням.
1.1 Поняття сас. Структурні схеми сас
Судновими автоматичними системами (САС) є системи автоматичного управління (САУ), що використовуються для автоматизації складної суднової техніки.
Будь-яку САС можна представити як коло, що складається з окремих ланок, які знаходяться в тому або іншому з’єднанні між собою. Схема САС, зображена графічно (рис. 1) у вигляді окремих ланок (1-7), визначає характер їх з’єднання між собою і називається структурною схемою.
|
|
|
|
|
Рис. 1 – Структурна схема САС |
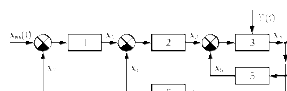
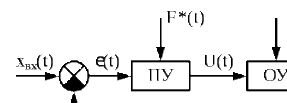
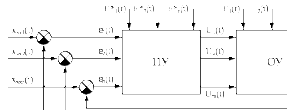
У системах автоматичного управління сигнали, що впливають на систему, можуть багато разів змінювати напрям свого проходження, розгалужуючись і підсумовуючись в різних точках схеми. Точки, від яких вхідний сигнал починає проходити по двох або декількох напрямах, називаються вузлами розгалуження. Точки, в яких алгебраїчно підсумовуються сигнали, що поступають з різних напрямів, називаються суматорами. Спрощення структурних схем шляхом об’єднання окремих ланок називається перетворенням, або згортанням структурних схем; воно дозволяє привести систему до виду одновимірної (рис. 2, а) або багатовимірної (рис. 2, б) автоматичної системи.
|
|
|
а) |
|
|
|
|
|
б) |
|
|
|
Рис. 2 – Спрощені структурні схеми САС: одновимірна автоматична система (а); багатовимірна автоматична система (б); ПУ – пристрій управління, ОУ – об’єкт управління |
У теорії автоматичного управління для математичного опису кожної ланки (елементу) САС широко використовується поняття передаточної функції. Передаточною функцією ланки або системи автоматичного управління називають відношення перетворення Лапласа вихідної величини до перетворення Лапласа вхідної величини за нульових початкових умов.
Передаточна
функція
![]() згідно визначенню може бути записана
у вигляді:
згідно визначенню може бути записана
у вигляді:
|
|
 .
.
Поведінка
системи автоматичного управління
визначається як її структурою, обумовленою
видом характеристичного рівняння
![]() або її полюсами, так і характером вхідних
дій, які визначаються видом полінома
або її полюсами, так і характером вхідних
дій, які визначаються видом полінома![]() або її нулями. При цьомуполюсами
називають
коріння характеристичного рівняння
або її нулями. При цьомуполюсами
називають
коріння характеристичного рівняння
![]() ,
анулями
–
коріння рівняння, які отримуються при
прирівнюванні нулю полінома
,
анулями
–
коріння рівняння, які отримуються при
прирівнюванні нулю полінома
![]() .
.
У структурній схемі кожна ланка САС характеризується своєю передаточною функцією.
Одне з основних завдань аналізу САС полягає у визначенні передаточних функцій ланок і систем в цілому. Самі передаточні функції є основними характеристиками ланок і САС.
При
заміні оператора
![]() на частотний оператор
на частотний оператор![]() отримуємо частотну передаточну функцію
отримуємо частотну передаточну функцію![]() :
:
|
|
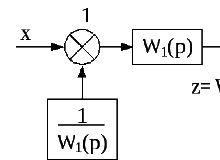
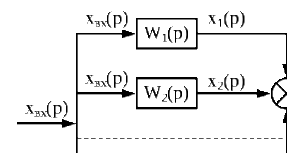
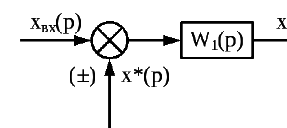
Залежно від технічної реалізації САС і отримання необхідних характеристик, ланки в САС з’єднуються в різних комбінаціях. Якою б складною не була б структурна схема САС, в ній завжди можна виділити три типові з’єднання ланок: послідовне (рис. 3, а), паралельне (рис. 3, б) і зустрічно-паралельне (рис. 3, в).
|
|
|
|
а) | |
|
| |
|
|
|
|
б) | |
|
| |
|
|
|
|
в) | |
|
| |
|
Рис. 3 – Типові з'єднання ланок: послідовне (a); паралельне (б); зустрічно-паралельне (в) | |
Предметом структурного аналізу є побудова і перетворення структурних схем САС з метою визначення передаточної функції системи і подальшого дослідження її якісних характеристик.
Побудова структурної схеми САС може бути здійснена за функціональною схемою САС після визначення ланок за передаточними функціями елементів, що входять в систему, або за рівняннями руху складного об’єкту (судна), наприклад, що відображає взаємозв’язок гідродинамічних сил і моментів.
Структурна схема САС, як правило, складна багатоконтурна, побудована тим або іншим способом, повинна бути перетворена шляхом згортання в одноконтурну САС.
В процесі згортання структурної схеми необхідно користуватися правилами перетворення, наведеними в таблиці 1.1.
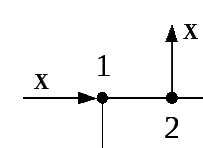
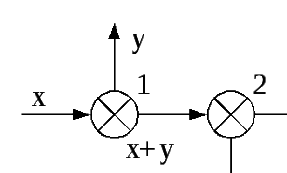
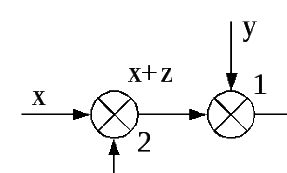
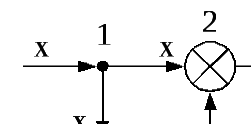
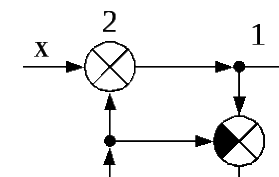
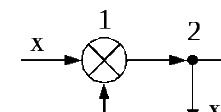
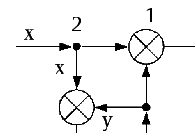
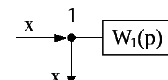
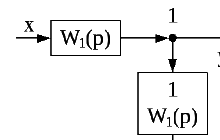
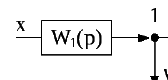
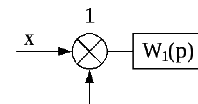
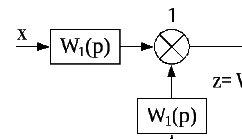
Таблиця 1 – Правила перетворення структурних схем
|
Перетворення |
Початкова схема |
Еквівалентна схема |
|
Перенесення вузлів |
|
|
|
Перенесення суматорів |
|
|
|
Перенесення вузла через суматор |
|
|
|
Перенесення суматора через вузол |
|
|
|
Перенесення вузла через ланку по ходу сигналу |
|
|
|
Перенесення вузла через ланку проти ходу сигналу |
|
|
|
Перенесення суматора через ланку по ходу сигналу |
|
|
|
Перенесення суматора через ланку проти ходу сигналу |
|
|