

1 Структурный анализ рычажного механизма
Структурный анализ необходим для выявления особенностей строения механизма, определения последовательности его кинематического и динамического анализа в курсовом проекте.
Рассмотрим механизм зубодолбёжного станка. Кинематическая схема представлена на рисунке 1.1.
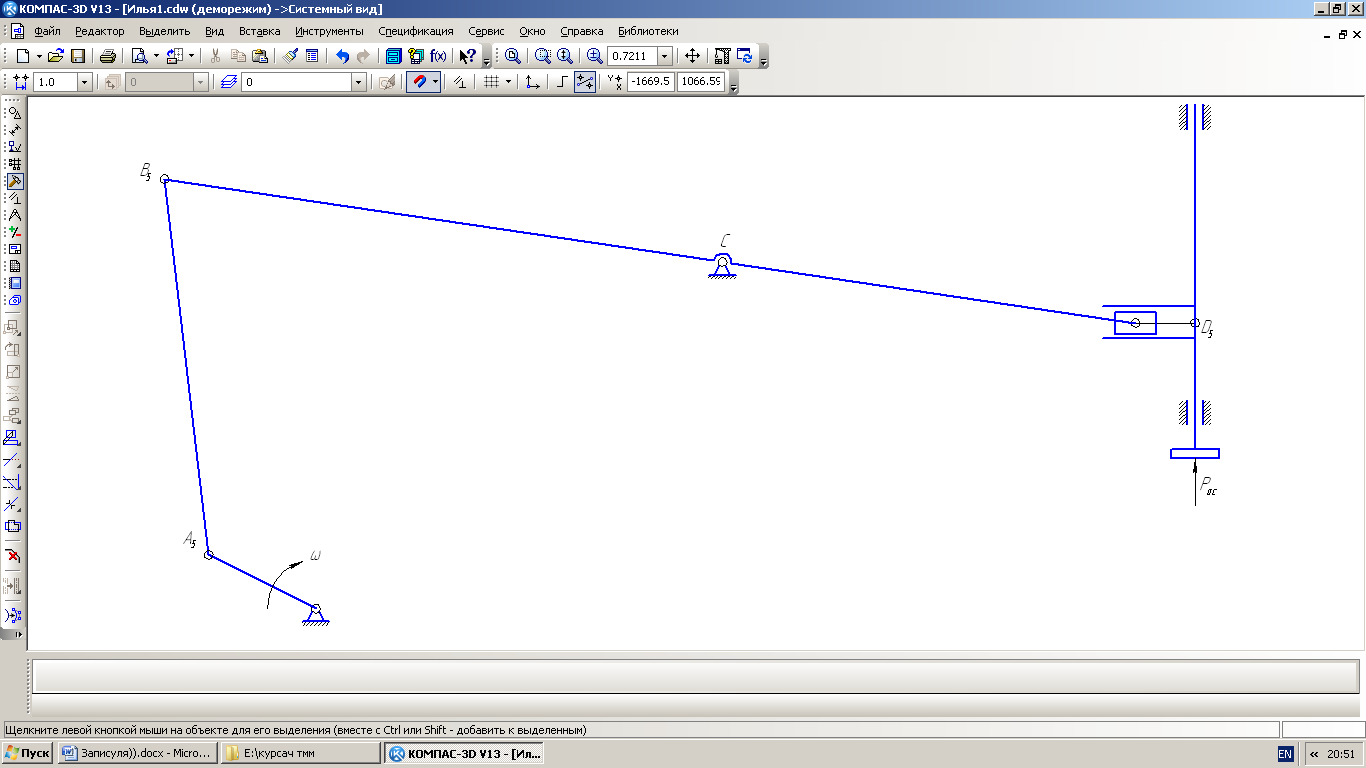
Рисунок 1.1 – Схема плоского рычажного механизма
Подсчитав число звеньев и число кинематических пар механизма по формуле
П.А. Чебышева для плоского механизма, рассчитываем его степень подвижности.
W=3∙n-2∙p5 –p4 (1.1)
где: n- число всех подвижных звеньев механизма, n=5;
p5 – число кинематических пар 5-го класса. p5 =7;(вращательные пары – O(0,1); A(1,2); B(2,3); C(2,3); D(4,5), поступательные пары – E(4,5), E(5,0))
p5 – число кинематических пар 4 класса. В данном случае они отсутствуют.
W=3∙n- 2∙p5=3∙5-2∙7=1
Таким образом, для того чтобы все звенья механизма совершали однозначно определённые движения, необходимо задать движение одному звену – в данном случае кривошипу 1. Тогда угловая координата кривошипа φ1 является обобщённой координатой механизма, производная φ1 = ω1 – угловой скоростью начального звена, а кривошип – начальным звеном.
Отсоединяем от исходного звена группу Ассура состоящую из 2 звеньев и наиболее удалённую от ведущего звена. В данном случае это будет группа Ассура состоящая из звеньев 4,5.
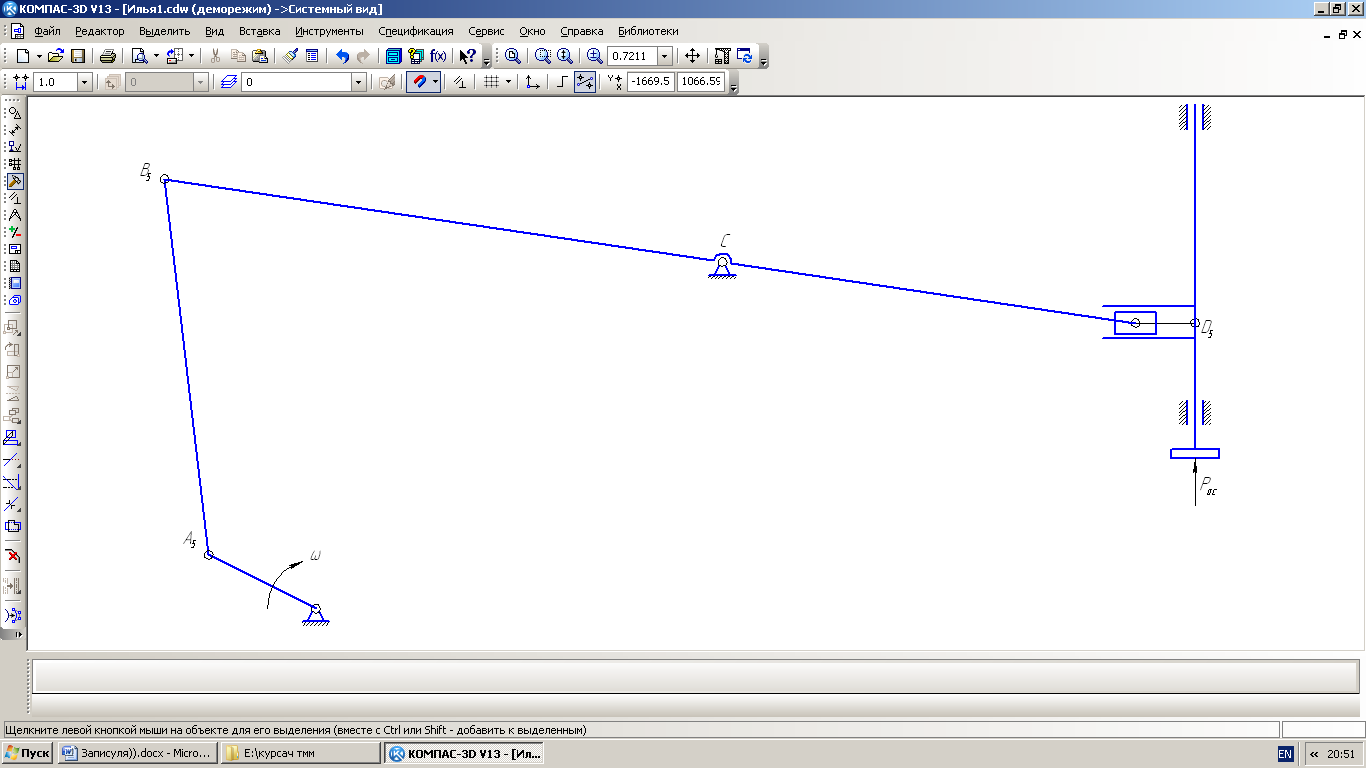
Рисунок 1.2 – Структурная группа 2-го класса 2-го порядка 4-го вида
Определяем степень подвижности группы по формуле Чебышева
W=3n-2p5-p4=3∙2-2∙3=0
Отсюда следует, что группа Ассура определена правильно. Она относиться ко второму классу, второму порядку и четвёртому виду.
Отсоединим ещё одну группу Ассура состоящую из звеньев 2,3.
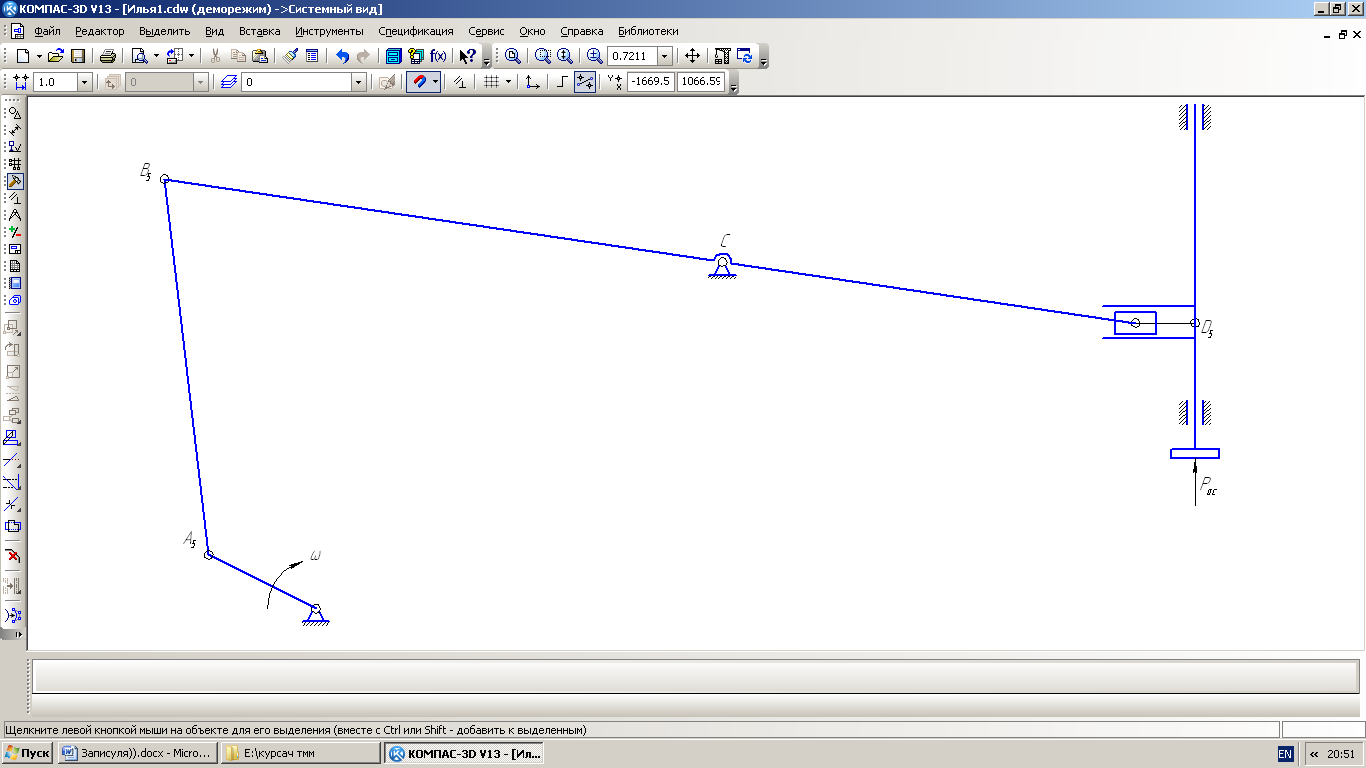
Рисунок 2.3 – Структурная группа 2-го класса 2-го порядка 2-го вида
Определяем степень подвижности по формуле Чебышева.
W=3n-2p5-p4=3∙2-2∙3=0
Отсюда следует что мы, верно, определили группу Ассура. Выделенная группа Ассура относится ко второму классу и имеет второй порядок и второй вид.
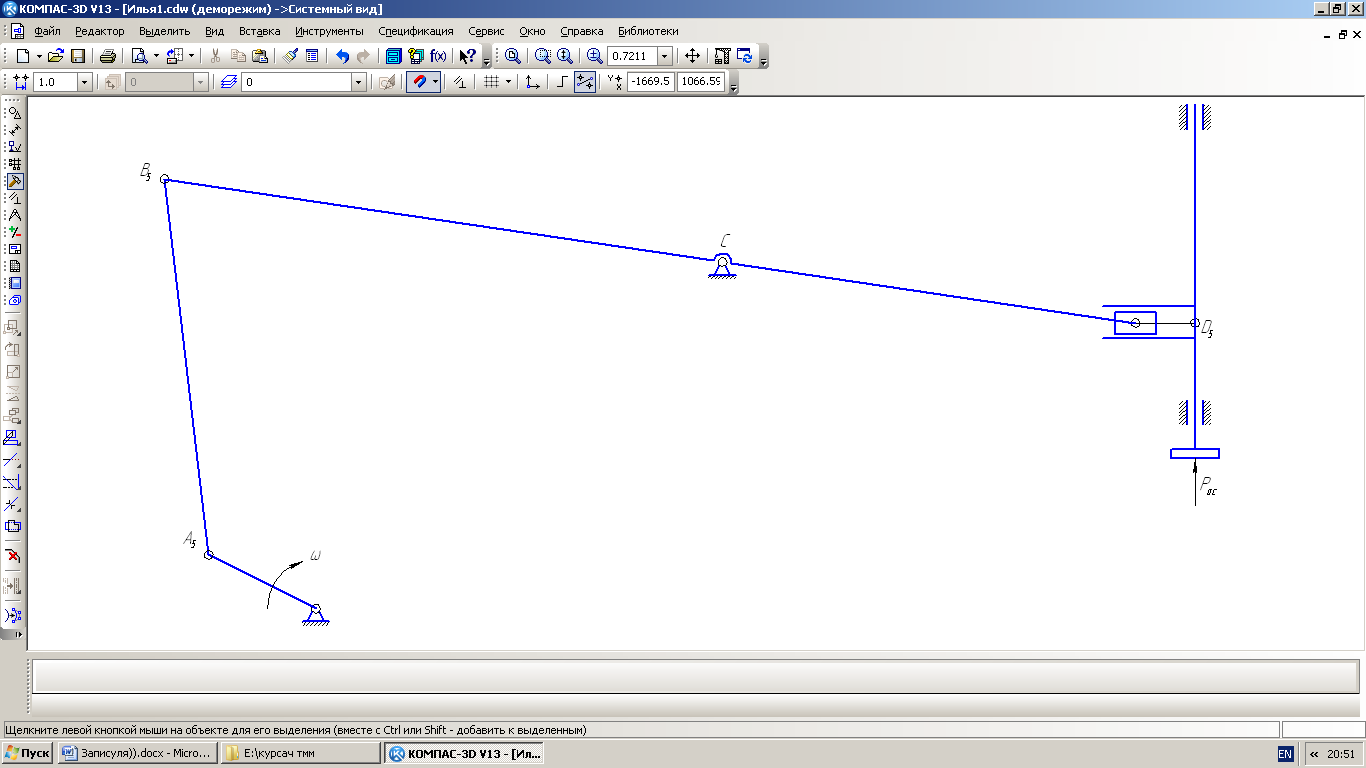
Рисунок 1.4 - Нулевой механизм
Оставшийся механизм называется нулевым или начальным механизмом, во всех выше указанных отдельных структурных группах степень подвижности W=0. Простейшие цепи типа 2 - 3; 4 - 5 называют нормальными цепями или группами Ассура.
Формула строения механизма будет иметь вид:
I(О,1) →II (2,3) → II (4,5) (1.2)
Так как обе группы 2-ого класса, то механизм относится ко 2-ому классу. Таким образом, кинематический анализ будет начинаться с механизма I(0,1), а заканчиваться группой II(4,5). Силовой расчет выполняется в обратной последовательности II(4,5)→ II(2,3) → I(0,1).
2 Кинематический анализ механизма
Кинематическое исследование проектируемого привода предполагает определение закона движения ведомого звена при заданном законе движения ведущего звена — кривошипа (движение последнего принимаем равномерным ω1 = const), а также определение скоростей и ускорений точек и звеньев механизма. Поэтому кинематический анализ сводится к определению соответствующих параметров движения проектируемого механизма и построению графиков его перемещений, скоростей и ускорений.