

4.5 Определение уравновешивающей силы методом Жуковского.
В произвольном
масштабе строим план скоростей для
данного положения, повернутый на 900в сторону .
В соответствующих точках плана
прикладываем все известные силы (в том
числе и
.
В соответствующих точках плана
прикладываем все известные силы (в том
числе и ,
силы инерции а также пары сил, заменяющие
моменты сил инерции:
,
силы инерции а также пары сил, заменяющие
моменты сил инерции:
 (4.51)
(4.51)
 (4.52)
(4.52)
 (4.53)
(4.53)
Силу
 учитывать не будем так как они очень
малы.
учитывать не будем так как они очень
малы.
Составляем уравнение моментов относительно полюса плана скоростей:
 (4.54)
(4.54)

Тогда уравновешивающий момент будет равен:
 (4.55)
(4.55)
Погрешность двух методов составила:
 (4.56)
(4.56)
Основная погрешность метода составляет:
 (4.57)
(4.57)
Следовательно силовой анализ механизма выполнен верно.
5 Синтез кулачкового механизма
Задачами проектирования кулачкового механизма являются:
определение основных размеров из условия ограничения угла давления;
построение профиля кулачка, обеспечивающего заданный закон движения коромысла с роликом.
Исходными данными для синтеза являются схема механизма (рисунок 5.1) и основные параметры.
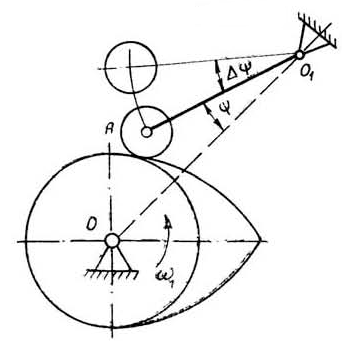
Рисунок 5.1 – Схема кулачкового механизма
Угол качания коромысла

Длина коромысла

Угол удаления

Угол дальнего стояния

Угол возврата

Угол давления

5.1 Определение кинематических характеристик толкателя
Движение
коромысла характеризуется зависимостями
перемещения
 ,
аналога скорости
,
аналога скорости ,
аналога ускорения
,
аналога ускорения от угла поворота кулачка
от угла поворота кулачка .
.
Рабочий угол кулачка равен:
 (5.1)
(5.1)
в радианах:
 (5.2)
(5.2)
Фазовые углы в радианах равны:
 (5.3)
(5.3)
 (5.4)
(5.4)
 (5.5)
(5.5)
Принимаем отрезок [0-17] изображающий на
графиках рабочий угол
 равным 225 мм. Тогда масштабный коэффициент
равным 225 мм. Тогда масштабный коэффициент будет равен:
будет равен:
 (5.6)
(5.6)
Отрезки, изображающие фазовые углы:
 (5.7)
(5.7)
 (5.8)
(5.8)
 (5.9)
(5.9)
Максимальное линейное перемещение центра ролика коромысла:
 (5.10)
(5.10)
На фазе удаления ролик движется по
закону изменения ускорения по треугольнику,
а на фазе возврата по трапецеидальному
закону. На основании этих законов
определяем
 ,
, ,
, .
.
Результаты определения
 ,
, ,
, приведены
приведены
в таблице 5.1.
Таблица
5.1 – Результаты вычислений
 ,
, ,
,
|
Фаза |
№ пол. |
φ |
|
|
| |
|
град. |
рад. | |||||
|
удаления |
0 |
0 |
0,00 |
0,0000 |
0,0000 |
0,0000 |
|
1 |
11,25 |
0,20 |
0,0005 |
0,0071 |
0,0724 | |
|
2 |
22,5 |
0,39 |
0,0037 |
0,0284 |
0,1449 | |
|
3 |
33,75 |
0,59 |
0,0116 |
0,0498 |
0,0724 | |
|
4 |
45 |
0,79 |
0,0223 |
0,0569 |
0,0000 | |
|
5 |
56,25 |
0,98 |
0,0330 |
0,0498 |
-0,0724 | |
|
6 |
67,5 |
1,18 |
0,0410 |
0,0284 |
-0,1449 | |
|
7 |
78,75 |
1,37 |
0,0433 |
0,0071 |
-0,0724 | |
|
8 |
90 |
1,57 |
0,0447 |
0,0000 |
0,0000 | |
|
возврата |
9 |
105 |
0,00 |
0,0447 |
0,0000 |
0,0000 |
|
10 |
120 |
0,26 |
0,0441 |
-0,0071 |
-0,0543 | |
|
11 |
135 |
0,52 |
0,0403 |
-0,0213 |
-0,0543 | |
|
12 |
150 |
0,79 |
0,0329 |
-0,0356 |
-0,0543 | |
|
13 |
165 |
1,05 |
0,0223 |
-0,0427 |
0,0000 | |
|
14 |
180 |
1,31 |
0,0118 |
-0,0356 |
0,0543 | |
|
15 |
195 |
1,57 |
0,0043 |
-0,0213 |
0,0543 | |
|
16 |
210 |
1,83 |
0,0006 |
-0,0071 |
0,0543 | |
|
17 |
225 |
2,09 |
0,0000 |
0,0000 |
0,0000 | |



Масштабные коэффициенты равны:
 (5.11)
(5.11)
 (5.12)
(5.12)
 (5.13)
(5.13)
Ординаты графиков равны:
 (5.14)
(5.14)
Результаты определения ординат графиков
 ,
, ,
, приведены в таблице 5.2. На основании
данных ординат строим соответствующие
графики перемещения
приведены в таблице 5.2. На основании
данных ординат строим соответствующие
графики перемещения ,
аналога скорости
,
аналога скорости ,
аналога ускорения
,
аналога ускорения в зависимости от угла поворота кулачка
в зависимости от угла поворота кулачка .
.
Таблица
5.2 – Ординаты графиков
 ,
, ,
,
|
№ положения |
|
|
|
|
мм | |||
|
0 |
0,00 |
0,00 |
0,00 |
|
1 |
0,47 |
7,11 |
72,43 |
|
2 |
3,72 |
28,44 |
144,86 |
|
3 |
11,64 |
49,78 |
72,43 |
|
4 |
22,34 |
56,89 |
0,00 |
|
5 |
33,04 |
49,78 |
-72,43 |
|
6 |
40,96 |
28,44 |
-144,86 |
|
7 |
43,28 |
7,11 |
-72,43 |
|
8 |
44,68 |
0,00 |
0,00 |
|
9 |
44,68 |
0,00 |
0,00 |
|
10 |
44,06 |
-7,11 |
-54,32 |
|
11 |
40,34 |
-21,33 |
-54,32 |
|
12 |
32,89 |
-35,56 |
-54,32 |
|
13 |
22,34 |
-42,67 |
0,00 |
|
14 |
11,79 |
-35,56 |
-54,32 |
|
15 |
4,34 |
-21,33 |
-54,32 |
|
16 |
0,62 |
-7,11 |
-54,32 |
|
17 |
0,00 |
0,00 |
0,00 |


