2.1 Построение планов положений механизма
Планом механизма называется изображение кинематической схемы механизма в выбранном масштабе, соответствующее определенному положению начального звена.
По заданной конструктивной схеме составляется кинематическая схема механизма. Кинематическая схема вычерчивается в 12 положениях кривошипа О1 А. Начальным положением является начало рабочего хода. От начального положения откладываем остальные положения с шагом в 30о.
Для построения планов выбираем масштабный коэффициент длины
где
 – истинный размерO1A.
– истинный размерO1A.
[O1A] – отрезок изображающий звено на плане, принимаем его 60 мм.
С учётом этого

Определяем длины отрезков остальных звеньев в выбранном масштабе



Исходя из полученных данных, производиться построение планов положений механизма.
Наносим неподвижные элементы механизма O1 и C с учётом расстояний X1 и Y. Затем радиусом O1A проводим окружность, по которой перемещается точка A. На этой окружности через равные промежутки откладываем 12 положений точки А, соединив их с центром O1 получим соответствующие положения кривошипа. Начальным положением принимаем точку A0 , которой соответствует начальное положение ползуна D. Нумерацию остальных точек производим по направлению вращения кривошипа (по часовой стрелке).
Положения структурных составляющих групп Ассура строим методом засечек. Точку B находим засечками сделанными радиусом CB из точки C и радиусом AB из точки Ai. Точку D сроим на продолжении звена BC.
2.2 Построение планов аналогов скоростей
Для приведения сил и масс механизма необходимо знать передаточные функции звеньев и центров масс. Для их определения используется графический метод – построение планов аналогов скоростей механизма для всех положений.
Аналог скорости точки A равен:

Принимаем масштабный коэффициент аналогов скоростей µU=0,002 м/мм;
Тогда отрезок изображающий UA, равен:

Так
как
 и направлен в сторону вращения кривошипа,
то откладываем отрезок
и направлен в сторону вращения кривошипа,
то откладываем отрезок (для соответствующего положения
кривошипа).
(для соответствующего положения
кривошипа).
Для построения планов аналогов скоростей группы Ассура 2,3 необходимо определить положение точки B. Для этого составим два векторных уравнения:
Где
 =0,
точкаC
являющаяся стойкой совпадает с полюсом.
=0,
точкаC
являющаяся стойкой совпадает с полюсом.

 где
где
 соответственно.
соответственно.
В соответствии с уравнениями (2.4) из точки а1 проводим перпендикуляр к звену BA, а из точки p перпендикуляр к звену BC. На пересечении обозначаем точку b1.
Точку D принадлежащую 3-ему звену строим на продолжении отрезка pb по теореме подобия.
Длину
отрезка
 находим из подобия:
находим из подобия:

Длина отрезка pbберётся из плана аналогов, аCDиCBиз плана положений механизма в соответствующем положении.
Для нахождения точки Dпринадлежащей 5 звену составим два векторных уравнения:
Где

 аналоги относительных скоростей точкиD5относительно
точкиD3иCсоответственно.
аналоги относительных скоростей точкиD5относительно
точкиD3иCсоответственно.
Согласно данным векторным уравнениям (2.6) из точки d3проводим отрезок перпендикулярный звенуCD, а из точкиpпроводим отрезок параллельный направляющей ползуна до пересечения с перпендикуляром из точкиd3. На пересечении обозначаем точкуd5.
Точки S2иS3находим по теореме подобия:
 (2.7)
(2.7)
 (2.8)
(2.8)
На основании выполненных построений определяем передаточные отношения (аналоги скоростей):



Аналогичным образом рассчитываем передаточные отношения для всех 12 положений и заносим их в таблицу 2.1 и 2.2.
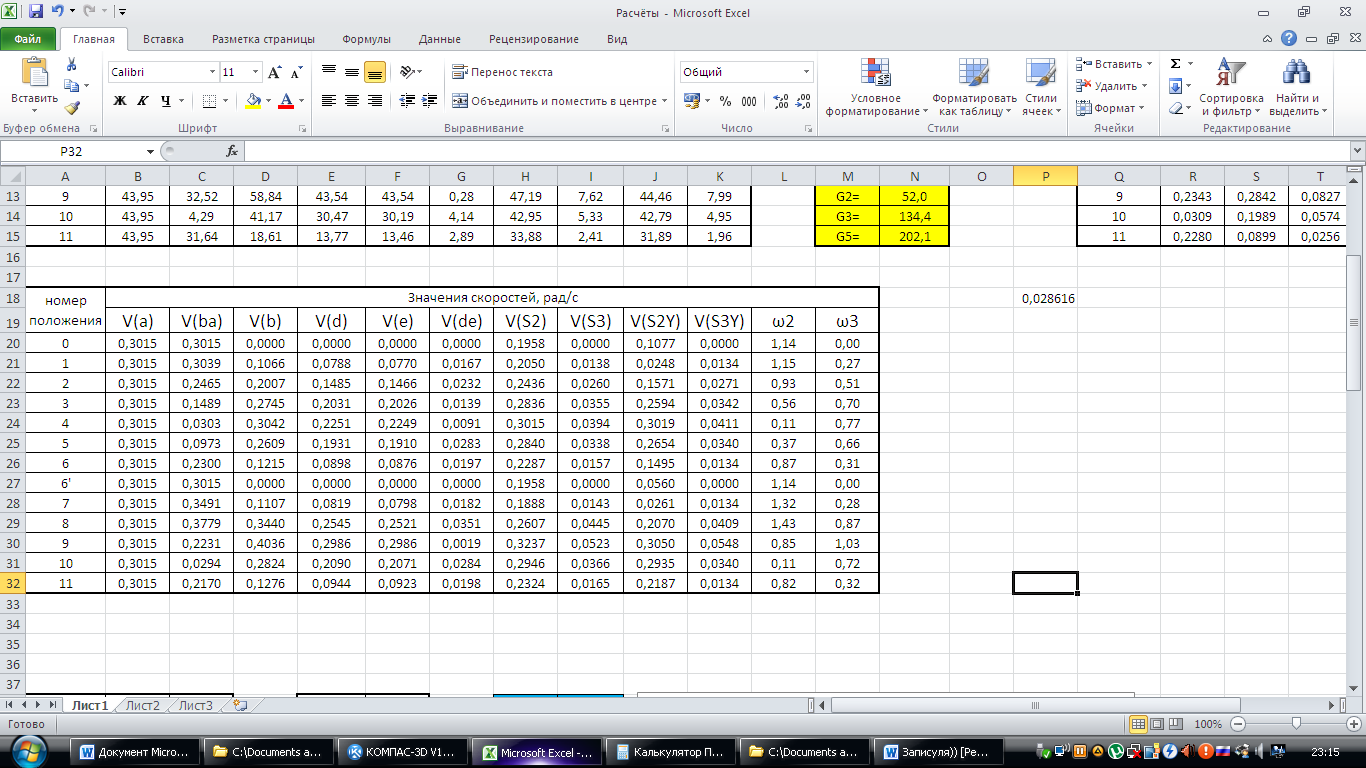
Таблица 2.1 – Численное значение векторов аналогов скоростей

Таблица 2.2 – Передаточные функции механизма

Для нахождения действительных скоростей необходимо знать масштабный коэффициент скорости, вычисляемый по формуле:

Угловые скорости звеньев 2 и 3, которые движутся плоскопараллельно, находим по следующим формулам:

Для всех 12-и положений проводим аналогичные расчёты. Результаты вычислений заносим в таблицу 2.3.
Таблица 2.3 – Численные значения линейных и угловых скоростей