

Расчет аср разрежения в топке
В качестве исходных данных имеем имитационную модель, информационную и расчетную схемы регулирования и кривую разгона по интересующему нас каналу регулирования.
Кривую разгона по разрежению в топке получена путем подачи возмущения изменением угла подачи газов н.а. ДС для канала задания и внутреннего возмущения на 11,5%.
Кривая разгона получилась следующего вида (рис. 82):
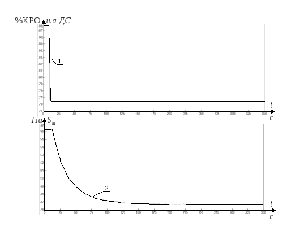
рис. 82. Кривые разгона (1 - изменение положения н.а.ДС, 2 - кривая разгона Sт по каналу «н.а.ДС –Sт»)
По
полученной кривой разгона проведем
расчет переходной характеристики по
формуле: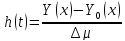
Полученная переходная характеристика представлена на рис. 83:
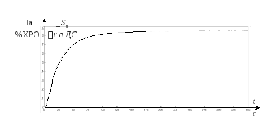
рис. 83. Переходная характеристика по каналу «н.а.ДС – Sт»
Далее воспользуемся ПМК «ТЕМП» для расчета комплексно-частотной характеристики по каналу задания. Полученная комплексно-частотная характеристика по каналу регулирования представлены на рис. 84:
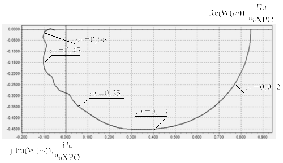
рис. 84. КЧХ по каналу «н.а.ДС – Sт»
Получив КЧХ можно приступать к расчету настройки регулятора в программе ПМК «TEMП». Регулятор представляет собой передаточную функцию, реализующую ПИ-закон регулирования.
Линия
заданного запаса устойчивости для
регулятора ( )
приведена на рис. 85:
)
приведена на рис. 85:
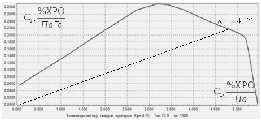
рис. 85. Линия заданного запаса устойчивости регулятора
Оптимальные настройки регулятора:
Kр=4,79 [%ХРО/Па]; Ти=22 сек;wр=0,19 [рад/сек]
Реализация автоматических систем управления в среде технологического программирования «пилон»
Реализация аср топлива и питания прямоточным котлом тгмп-114 в стп «пилон»
Для реализации двухконтурной схемы регулирования температуры за ВРЧ 2 с дифференциатором в среде технологического программирования «ПИЛОН» применим алгоблок РИМ 2 – регулятора импульсного, который определяет ПИ - закон регулирования и выдает управляющее воздействие на РМ-А, и алгоблок ДИФ 1 – дифференциатор, обрабатывающий сигнал по опережающему каналу и ДИФ 2 – дифференциатор, обрабатывающий сигнал по внешнему возмущению для его компенсации (рис.99) [5].
Для реализации одноконтурной схемы регулирования расхода питательной воды в среде технологического программирования «ПИЛОН» применим блок РИМ 1 - регулятора импульсного, который определяет ПИ - закон регулирования и выдает управляющее воздействие на РПК-А [5].
Описание схем
В соответствии с рассчитанными в п.4.2.1, 4.2.2 настройками регулятора и дифференциатора, изменим коэффициент усиления и постоянную времени у алгоблоков РИМ и ДИФ (табл. 15).
табл. 15. Настройки регуляторов топлива и питания
|
|
ДИФ 1 - дифференциатор |
ДИФ 2 – устройство компенсации |
РИМ 1 – регулятор питания |
РИМ 2 – регулятор топлива |
|
Кр |
0.464 |
1.54 |
2.16 |
1,33 |
|
Ти |
9 |
11.1 |
6 |
40 |
|
Зона нечувствительности |
- |
- |
0,05%=0,071 кг/с |
0,1% = 0,6 0С |
|
Время фильтрации |
- |
- |
1 |
5 |
На регулятор импульсный РИМ 1 поступает один сигнал: на вход Х1 по расходу питательной воды Gпв. В соответствии с заданными настройками регулятора происходит обработка сигналов согласно ПИ-закона регулирования, и выдается управляющий сигнал на выход алгоблока РИМ 1Yвых, которое подается на вход Хрегалгоблока УКЛ, который осуществляет управления ИМ РПК-А.
В качестве обратной связи используются сигнал по степени открытия клапана РПК-А, который заводится на вход Хим, и концевые выключатели РПК-А, которые заводятся на вход Сквои Сквзрегулятора РИМ 1. Так же на вход ТимРИМ 1 заводится постоянная времени хода равная 45,5 с.
На регулятор импульсный РИМ 2 поступают два сигнала: на вход Х1 Тврч2, а на вход Х2 заводится сигнал от сумматора, в котором учитываются сигналы по скорости изменения сигнала по опережающему каналу Тнрчи компенсации внешнего возмущенияGпв. Скорость изменения Тнрчстановится известной в ходе прохождения через алгоритм ДИФ 1, а сигнал компенсации внешнего возмущения вырабатывается при прохождении сигналаGпвчерез алгоритм ДИФ 2. В соответствии с заданными настройками регулятора происходит обработка сигналов согласно ПИ-закона регулирования, и выдается управляющий сигнал на выход алгоблока РИМ 2Yвых, которое подается на вход Хрегалгоблока УКЛ, который осуществляет управления ИМ РМ-А.
В качестве обратной связи используются сигнал по степени открытия клапана РМ-А, который заводится на вход Хим, и концевые выключатели РМ-А, которые заводятся на вход Сквои Сквзрегулятора РИМ 2. Так же на вход ТимРИМ 2 заводится постоянная времени ходаравная 25 с.
Важным параметром настройки регулятора в системе технологического программирования «Пилон» является зона нечувствительности (Хзон). В блоке РИМ 1 Хзонравна 0,05, что означает регулирование расхода питательной воды будет вестись с точностью ± 0,071 кг/с . В блоке РИМ 2 Хзонравна 0,1, значит регулирование температуры за ВРЧ 2 будет вестись с точностью ± 0,60С. Настройки зоны нечувствительности были получены экспериментальным способом.
Алгоритмическая схема регуляторов топлива и питания котла представлена на рис. 86.
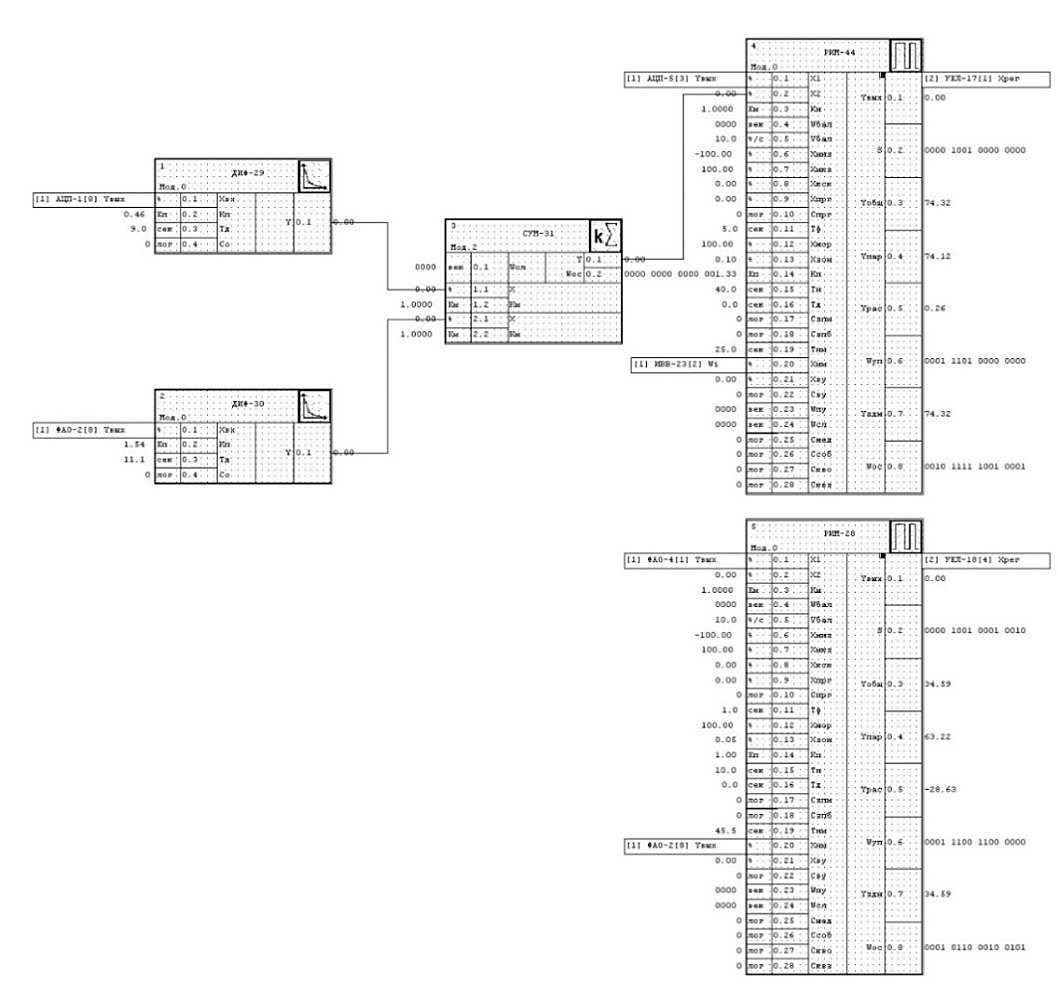
рис. 86. Алгоритмическая схема регуляторов питания и топлива котла