

Реализация аср впрыском питательной воды 1 и 2 в стп «пилон»
Для реализации двухконтурной схемы регулирования температуры перегретого пара с дифференциатором в среде технологического программирования «ПИЛОН» применим алгоблок РИМ – регулятора импульсного, который определяет ПИ - закон регулирования и выдает управляющее воздействие, и алгоблок ДИФ – дифференциатор, обрабатывающий сигнал по опережающему каналу [5].
Описание схем
В соответствии с рассчитанными в п.4.2.3, 4.2.4 настройкамирегулятора и дифференциатора, изменим коэффициент усиления и постоянную времени у алгоблоков РИМ и ДИФ (табл. 16).
табл. 16.Настройки регуляторов впрыска 1 и 2
|
|
ДИФ 1 – дифференциатор для Твпр1 |
ДИФ 2 – дифференциатор для Твпр2 |
РИМ 1 – регулятор впрыска 1 |
РИМ 2 – регулятор впрыска 2 |
|
Кр |
-0,31 |
-0,5 |
-7,14 |
-9,12 |
|
Ти |
4 |
3 |
18 |
8 |
|
Зона нечувствительности |
- |
- |
0,1%= 0,6 0С |
0,1% = 0,6 0С |
|
Время фильтрации |
- |
- |
0 |
0 |
На регулятор импульсный РИМ 1 поступает один сигнал: на вход Х1 по температуре пара за ШПП 1 (Тшпп1). Скорость изменения Твпр1становится известной в ходе прохождения через алгоритм ДИФ. Скорость изменения этого параметра заводится на вход РИМ 1 Х2. В соответствии с заданными настройками регулятора происходит обработка сигналов согласно ПИ-закона регулирования, и выдается управляющий сигнал на выход алгоблока РИМ 1Yвых, которое подается на вход Хрегалгоблока УКЛ, который осуществляет управления ИМ РВ-1А.
В качестве обратной связи используются сигнал по степени открытия клапана РВ-1А, который заводится на вход Хим, и концевые выключатели РВ-1А, которые заводятся на вход Сквои Сквзрегулятора РИМ 1. Так же на вход ТимРИМ 1 заводится постоянная времени хода равная 45,5 с.
На регулятор импульсный РИМ 2 поступает один сигнал: на вход Х1 по температуре пара за КПП 2 (Ткпп2). Скорость изменения Твпр2становится известной в ходе прохождения через алгоритм ДИФ. Скорость изменения этого параметра заводится на вход РИМ 2 Х2. В соответствии с заданными настройками регулятора происходит обработка сигналов согласно ПИ-закона регулирования, и выдается управляющий сигнал на выход алгоблока РИМ 1Yвых, которое подается на вход Хрегалгоблока УКЛ, который осуществляет управления ИМ РВ-2А.
В качестве обратной связи используются сигнал по степени открытия клапана РВ-2А, который заводится на вход Хим, и концевые выключатели РВ-2А, которые заводятся на вход Сквои Сквзрегулятора РИМ 2. Так же на вход ТимРИМ 2 заводится постоянная времени хода равная 45,5 с.
Важным параметром настройки регулятора в системе технологического программирования «Пилон» является зона нечувствительности (Хзон). В обоих блоках РИМ 1 и 2 Хзонравна 0,1%, что означает регулирование расхода питательной воды будет вестись с точностью ± 0,60С. Настройки зоны нечувствительности были получены экспериментальным способом.
Алгоритмическая схема регуляторов впрыска 1 и 2 представлена на рис. 87, рис. 88.
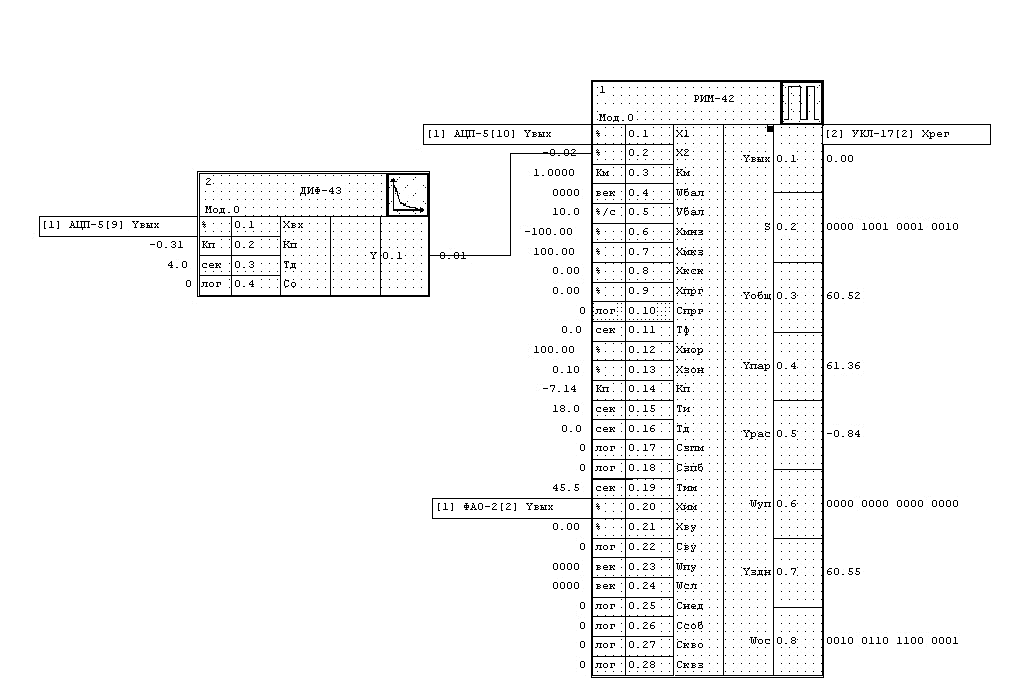
рис. 87. Регулятор впрыска 1
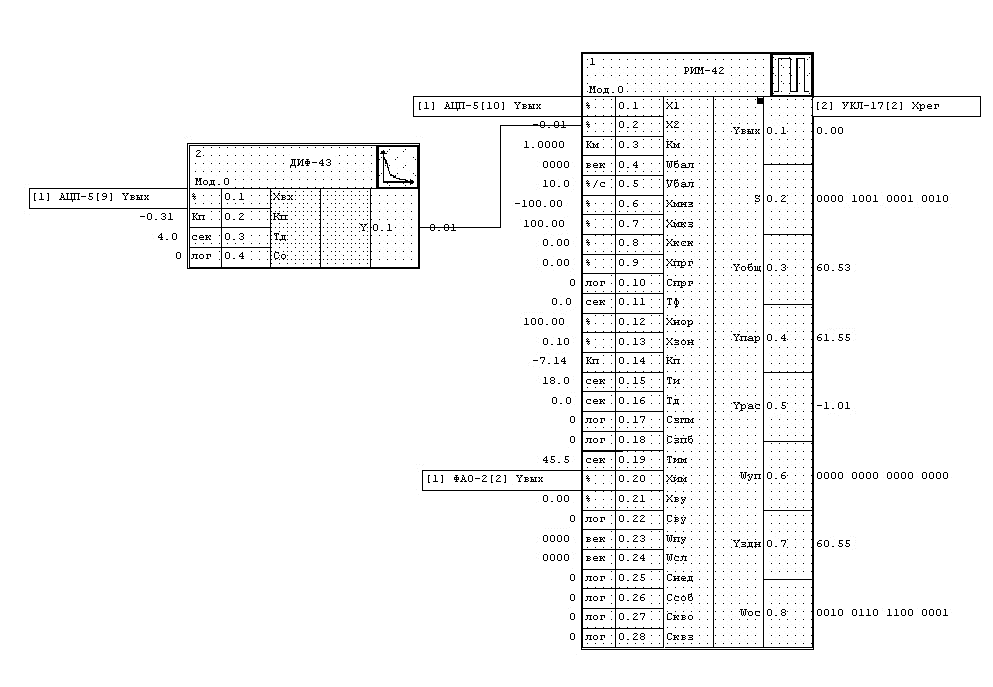
рис. 88. Регулятор впрыска 2