

8.4.2. Координатний спосіб визначення швидкості
Нехай, кінематичні залежності руху точки, задані координатним декартовим способом (8.2). Тоді формулу (8.18) можна записати так:
 (8.19)
(8.19)
де
 (8.20)
(8.20)
Є проекції швидкості точки на осі нерухомої декартової системи координат, що дорівнюють першим похідним за часом від координат точки.
З урахуванням (8.20) вираз (8.19) можна записати у вигляді:
![]() (8.21)
(8.21)
або
![]() (8.22)
(8.22)
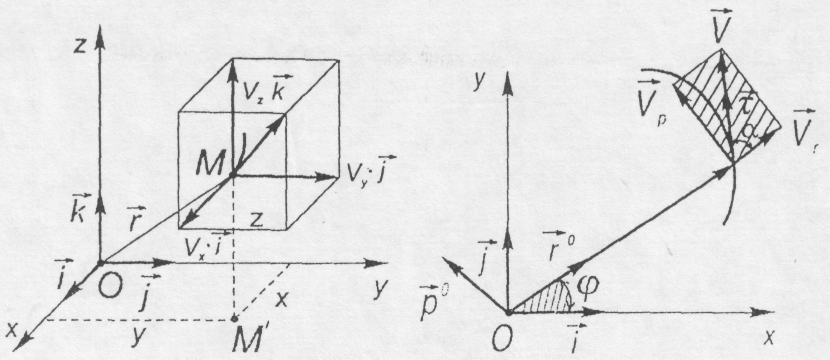
Рис. 8.12 Рис. 8.13
де
vx,vy,vz
- складові
вектора
![]() вздовж
координатних осей
(рис.8.12).
вздовж
координатних осей
(рис.8.12).
Модуль та напрям швидкості визначаються за формулами:
![]() (8.23)
(8.23)
 (8.24)
(8.24)
За рівностями (8.20) - (8.24) визначається вектор швидкості точки координатним декартовим способом.
Розглянемо координатний полярний спосіб визначення руху точки. При цьому кінематичні залежності руху точки задаються функціями (8.9).
Введемо
орти:
![]() ,
спрямований вздовж радіуса-вектора
,
спрямований вздовж радіуса-вектора
![]() у бік зростання
у бік зростання
![]() ,
та
,
та
![]() - повернений відносно вектора
- повернений відносно вектора
![]() на кут
на кут
![]() у
бік
зростання кута φ
(рис.
8.13).
у
бік
зростання кута φ
(рис.
8.13).
Одиничні
вектори
![]() і
і
![]() можуть бути подані у вигляді
можуть бути подані у вигляді
![]()

Диференціюючи
![]() за
часом, одержимо:
за
часом, одержимо:
 (8.25)
(8.25)
аналогічно
 (8.26)
(8.26)
Радіус-вектор
![]() ,
що визначає положення точки, може бути
представлений у вигляді
,
що визначає положення точки, може бути
представлений у вигляді
![]()
При
русі точки змінюється як модуль, так і
напрямок радіуса-вектора
![]() ,
отже, і
,
отже, і
![]() і
і
![]() є функціями часу. На основі (8.18) маємо:
є функціями часу. На основі (8.18) маємо:

Використовуючи вираз (8.26), одержимо:
 (8.27)
(8.27)
Це
розкладання вектора швидкості точки
на дві взаємно перпендикулярні
складові, які називаються радіальною
![]() та поперечною
(трансверсальною)
та поперечною
(трансверсальною)
![]() швидкостями.
Модуль
швидкості точки визначається за формулою:
швидкостями.
Модуль
швидкості точки визначається за формулою:
![]() (8.28)
(8.28)
8.4.3. Натуральний спосіб визначення швидкості
Нехай
точка М
рухається
по певній кривій. За проміжок часу ∆t
точки
переміститися з положення М
в
положення М1
. Дуга
MM1
=
∆σ
буде
більше нуля, якщо точка рухається в
сторону додатного відліку дуги (рис.
14,а) і
![]() ,
якщо рух проходить в протилежний бік
(рис. 8.14,6).
,
якщо рух проходить в протилежний бік
(рис. 8.14,6).
Скориставшись виразами (8.14) і (8.18), маємо:
Перепишемо це рівняння у вигляді:
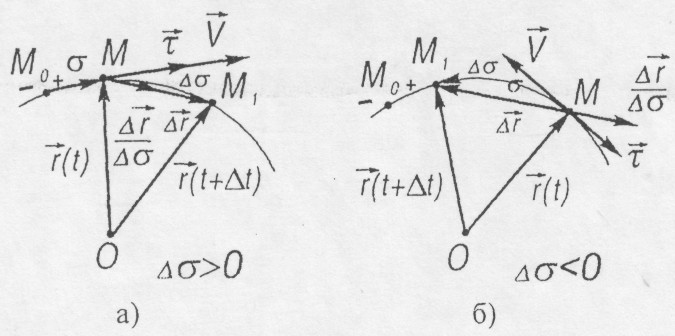
Рис. 8.14

Оскільки границя відношення дуги до стягуючої її хорди дорівнює за модулем одиниці, а граничне положення січної ММ1 співпадає з напрямком до дотичної до кривої в точці М , то

де
![]() - одиничний вектор, направлений по
дотичній до кривої.
- одиничний вектор, направлений по
дотичній до кривої.
Направлений
одиничний вектор дотичної
![]() завжди в сторону додатного відліку
дуги σ. Дійсно, якщо
завжди в сторону додатного відліку
дуги σ. Дійсно, якщо
![]() то вектор
то вектор
![]() направлений
в сторону
направлений
в сторону
![]() (рис. 8.14.а), а при
(рис. 8.14.а), а при
![]() вектор
направлений
в сторону, протилежну
вектор
направлений
в сторону, протилежну
![]() (рис.
8.14,6). В обох випадках
цей
вектор, а отже і його границя
(рис.
8.14,6). В обох випадках
цей
вектор, а отже і його границя
![]() ,
направлений
в сторону зростання дуги σ.
,
направлений
в сторону зростання дуги σ.
Приймаючи до уваги, що
 маємо
маємо

Проектуючи
вектор швидкості
![]() на
напрям
на
напрям
![]() ,
одержимо
,
одержимо
![]() ,
отже
,
отже
![]() (8.29)
(8.29)
Очевидно,
що v𝜏
=
v
,
якщо
рух точки проходить в бік додатного
відліку дуги і v𝜏
=
-v,
якщо рух точки проходить в протилежну
сторону,
отже
![]()
Так
як шлях, що проходить точка, завжди
додатний, то елемент шляху
![]()
і, отже, модуль швидкості можна визначити за формулою:
