8.3.2. Розкладання вектора прискорення точки за осями натурального тригранника (нормальна і дотична складові прискорення)
Вектор швидкості може бути представленим у вигляді
![]() ,
,
де
![]() - одиничний вектор дотичної, направлений
в сторону додатного відліку дуги;
- одиничний вектор дотичної, направлений
в сторону додатного відліку дуги;
![]() - проекція швидкості на напрям
- проекція швидкості на напрям
![]() .
.
На основі виразу (8.32) маємо:
 (8.44)
(8.44)
Подамо
похідну
![]() у вигляді:
у вигляді:
 (8.45)
(8.45)
Підставивши (8.45) в (8.44), одержимо:
 (8.46)
(8.46)
оскільки
![]()
Визначимо
величину і напрямок вектора
![]() .
Вектор
.
Вектор
![]() перпендикулярний вектору
перпендикулярний вектору
![]() .
Оскільки похідна вектора постійної
довжини перпендикулярна вектору. Отже,
вектор
.
Оскільки похідна вектора постійної
довжини перпендикулярна вектору. Отже,
вектор![]() направлений по якійсь нормалі.
направлений по якійсь нормалі.
Нехай
в момент часу t
точка
перебуває в положенні М
на
траєкторії, а в момент![]() - в положенні М1
, переносячи
вектор
- в положенні М1
, переносячи
вектор
![]() в
точку М
. знайдемо
зміну вектора
в
точку М
. знайдемо
зміну вектора![]() за проміжок часу
за проміжок часу![]()
![]()
Вектор![]() при русі точки в напрямку додатного
відліку дуги направлений в бік ввігнутості
траєкторії (рис. 8.19,а), а при русі точки
в бік від'ємного відліку дуги - направлений
в бік випуклості траєкторії (рис. 8.19,6).
при русі точки в напрямку додатного
відліку дуги направлений в бік ввігнутості
траєкторії (рис. 8.19,а), а при русі точки
в бік від'ємного відліку дуги - направлений
в бік випуклості траєкторії (рис. 8.19,6).
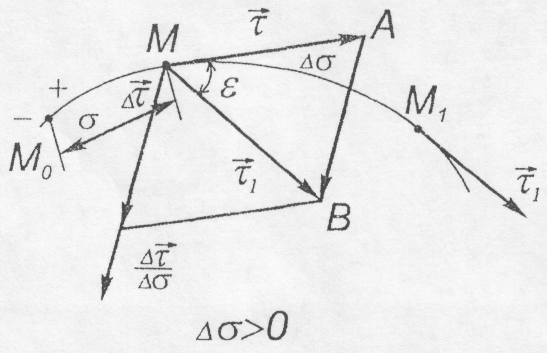
Рис. 8.19, а
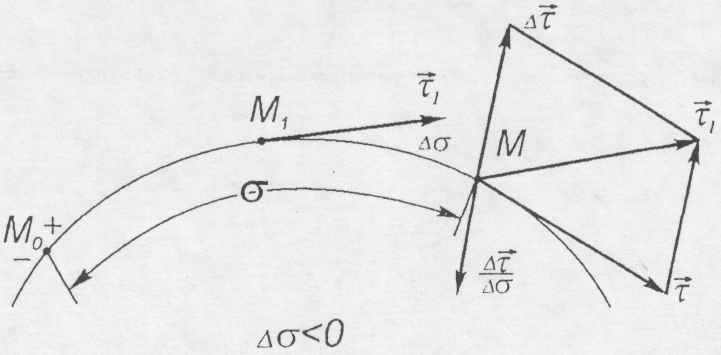
Рис. 8.19, б
Вектор
![]() буде завжди направлений в бік ввігнутості
траєкторії (рис. 1.19, а і б), тому що при
буде завжди направлений в бік ввігнутості
траєкторії (рис. 1.19, а і б), тому що при
![]() вектор
вектор
![]() направлений протилежно вектору
направлений протилежно вектору![]() ,
при
,
при![]() він
направлений в той самий бік, що і вектор
він
направлений в той самий бік, що і вектор![]() .
Вектор
.
Вектор![]() лежить в площині, що проходить через
точку М
і
вектори
лежить в площині, що проходить через
точку М
і
вектори
![]() і
і
![]() (площина МАВ
).
(площина МАВ
).
Отже,
вектор
![]() лежить в стичній
площині,
оскільки при
лежить в стичній
площині,
оскільки при
![]() площина
МАВ
збігається
з стичною площиною в точці М
.
площина
МАВ
збігається
з стичною площиною в точці М
.
Таким
чином, вектор
![]() лежить в стичній площині, направлений
в бік ввігнутості траєкторії,
перпендикулярний до
лежить в стичній площині, направлений
в бік ввігнутості траєкторії,
перпендикулярний до
![]() ,
отже, він направлений по головній нормалі
до центра кривини.
,
отже, він направлений по головній нормалі
до центра кривини.
Знайдемо
тепер величину
![]() .
Трикутник АМВ
рівнобічний
(рис. 8.19,а), отже,
.
Трикутник АМВ
рівнобічний
(рис. 8.19,а), отже,
![]() або користуючись рівняннями (8.43) і
(1.44). одержимо:
або користуючись рівняннями (8.43) і
(1.44). одержимо:
Враховуючи,
що
![]() одиничний
вектор головної нормалі, будемо мати:
одиничний
вектор головної нормалі, будемо мати:
 і, отже
і, отже
 (8.47)
(8.47)
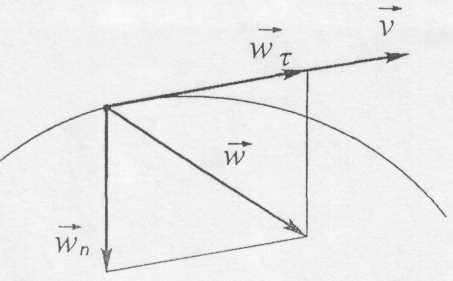
З цієї формули випливає, що вектор прискорення лежить в стичній площині.
Складові
прискорення за напрямами
![]() і
і
![]() відповідно будуть:
відповідно будуть:
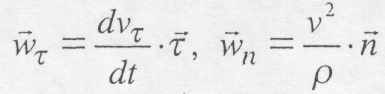
Проекція
прискорення на напрямок
![]()
 (8.48)
(8.48)
називається дотичним прискоренням.
Проекція прискорення на головну нормаль
 (8.49)
(8.49)
називається нормальним прискоренням.
Нормальне
прискорення
![]() .
Проекція прискорення на бінормаль
дорівнює нулю.
.
Проекція прискорення на бінормаль
дорівнює нулю.
Дотичне прискорення характеризує зміну швидкості за величиною, а нормальне прискорення - зміну швидкості за напрямком.
Модуль вектора прискорення.
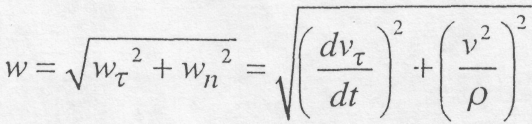 (8.50)
(8.50)
Дотичне
прискорення
 дорівнює нулю при русі точки з постійною
за модулем швидкістю і в момент часу, в
якій швидкість
дорівнює нулю при русі точки з постійною
за модулем швидкістю і в момент часу, в
якій швидкість![]() досягає
екстремальних значень.
досягає
екстремальних значень.
Якщо
![]() і
і
 одного знака, то модуль швидкості
одного знака, то модуль швидкості
![]() точки зростає і рух в цьому випадку
називається прискореним (рис. 8.20а).
точки зростає і рух в цьому випадку
називається прискореним (рис. 8.20а).
Якщо
ж
![]() і
і
 різних
знаків, то модуль швидкості
різних
знаків, то модуль швидкості
![]() спадає і рух буде сповільненим (рис.
8.20 б).
спадає і рух буде сповільненим (рис.
8.20 б).

а) Рис 8.20 б)
При
 модуль швидкості залишається постійним
і рух буде рівномірним.
модуль швидкості залишається постійним
і рух буде рівномірним.
Нормальне
прискорення дорівнює нулю при
прямолінійному русі (![]() J,
а
також в точках перегину криволінійної
траєкторії і в моменти часу, при якому
швидкість точки дорівнює нулю.
J,
а
також в точках перегину криволінійної
траєкторії і в моменти часу, при якому
швидкість точки дорівнює нулю.
Радіус кривини траєкторії можна визначити за формулою:
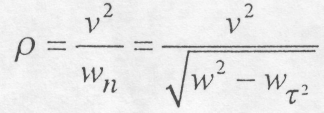 (8.51)
(8.51)
Зазначимо,
що для обчислення дотичного прискорення![]() можна використати рівність
можна використати рівність
![]() ,
оскільки
,
оскільки
![]()
Якщо
рух точки задано координатним способом,
у випадку опису руху в декартових
координатах
![]() то будемо мати:
то будемо мати:
Для полярних координат одержимо: