

Pakhomov_A_N__Krivenkov_M_V_Elektricheskiy_privod_uchebnoe_posobie
.pdf41
Часто при пуске момент двигателя поддерживается почти постоянным Мд ≈ const [9], что достигается либо плавным выведением секций пускового реостата, либо в результате использования ограничивающих ток обратных связей в замкнутых системах. Таким образом, если принять Мс = сonst, формула (2.24) для пуска электропривода при ω1 = 0 и ω2 = ωс примет вид:
tп = |
|
|
J |
|
ωсdω = |
|
|
J |
|
|
ωс = |
ωс . |
(2.25) |
M |
|
− M |
|
M |
|
− M |
|
||||||
|
д |
с |
∫ |
д |
с |
ε |
|
||||||
|
|
|
0 |
|
|
|
|
|
|||||
Для сокращения времени пуска необходимо повысить угловое ускорение |
|||||||||||||
ε = (M д − M с ) / J за счет |
увеличения |
Мд |
выше |
номинального |
значения |
||||||||
Мд = αММн (1 < αМ < λ, где λ – допустимая перегрузочная способность двигателя). Время торможения несколько меньше времени пуска, так как в этом случае статический момент способствует торможению и действует согласно с
двигательным моментом – знак плюс в знаменателе выражения (2.25).
При линейно изменяющихся двигательном и статическом моментах динамический момент изменяется также по линейному закону:
M дин = M д − M с = M кз − βω − M с0 − βсω = M дин0 − β′ω ,
где M дин0 = M кз − M c0 – значение динамического момента при ω = 0. Тогда время переходного процесса можно определить по формуле:
ω2 |
dω |
|
|
J |
|
M дин0 − β′ω1 |
= Tм′ ln |
M дин1 |
|
|
|
t = J ∫ |
= |
ln |
, |
(2.26) |
|||||||
M дин0 − β′ω |
β′ |
M дин0 − β′ω2 |
M дин2 |
||||||||
ω |
|
|
|
|
|
||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
где M дин1 и M дин2 – |
значения динамического момента в начале и конце пере- |
||||||||||
ходного процесса.
В зависимости от режима работы (пуск, торможение, изменение скорости) в формулу (2.26) следует подставлять соответствующие начальные и конечные значения динамического момента или скорости.
Согласно формуле (2.26) время переходного процесса теоретически равно бесконечности, так как установившийся режим наступает при M дин2 = 0 .
Практически считают, что переходный процесс закончен, если скорость отличается от установившейся не более чем на ( 2 ÷ 5 ) %. Так, при t = 3Tм значение
скорости по (2.22) равно ω ≈ 0,95ωc ( ωнач = 0 ), а при t = 4Tм – ω ≈ 0,98ωc . Та-
ким образом, время механического переходного процесса tпп = (3 ÷ 4)Tм .
42
2.14. Графо-аналитический метод расчета механических переходных процессов в электроприводе
При нелинейных зависимостях моментов двигателя и нагрузки от скорости возможно применение графо-аналитических методов решения уравнения движения электропривода. Естественно, что такие методы дают лишь приближенные результаты, однако их точность при тщательном выполнении расчетов вполне достаточна для решения практических задач.
Одним из наиболее распространенных приближенных методов является метод конечных приращений [1, 7], при котором весь процесс разбивается на отдельные участки. На каждом участке значения момента двигателя и статического момента или их алгебраической суммы ( M дин ) принимаются посто-
янными и равными среднему значению на этом участке. Таким образом, действительные кривые M д = f (ω) и M c = f (ω) заменяются ступенчатыми, и
применительно к каждому линейному участку проводится решение уравнения движения.
Существует два варианта применения метода конечных приращений. В первом из них, известном под названием принципа пропорций [1, 12, 15], задаются последовательно значениями ωi , графически определяют ti и по-
степенно получают всю кривую ω = f (t) . Для того чтобы полученная кривая
скорости хорошо отражала действительное протекание переходного процесса, следует задаваться очень малыми значениями ωi , т. е. разбивать процесс на
достаточно большое число участков. Однако чрезмерное увеличение числа участков может привести к значительным погрешностям при многократных графических построениях.
Во втором варианте, известном под названием метода последовательных интервалов [1], также задаются последовательно приращениями скорости ωi
и аналитическим способом вычисляются значения ti , используя уравнение движения (2.10) с заменой дифференциалов переменных их приращениями:
ti = J |
ωi |
, |
|
M дин срi |
|||
|
|
где M дин срi – среднее значение динамического момента на i-ом участке.
Все расчеты удобно свести в таблицу вида табл. 2.1, по данным которой строится кривая ω = f (t) . Используя известную зависимость M д = f (ω) легко
построить кривую M д = f (t) . При необходимости построения зависимости углового пути от времени ϕ = f (t) уравнение dϕ = ωdt также записывается в приращениях ϕ = ωср t и используются данные столбцов 3 и 5 табл. 2.1.

43
Таблица 2.1
|
i |
|
ωi |
ωi = ωi−1 + |
ωi |
|
M дин срi |
ti |
|
ti |
= ti−1 + |
ti |
||
|
1 |
|
2 |
3 |
|
|
4 |
5 |
|
|
6 |
|
||
|
1 |
|
ω1 |
ω1 = |
ω1 |
|
|
M дин ср |
t1 |
|
|
t1 = |
t1 |
|
|
|
|
ω2 |
ω2 = ω1 |
+ |
ω2 |
|
1 |
|
|
|
= t1 |
+ |
|
|
2 |
|
|
M дин ср2 |
t2 |
|
t2 |
t2 |
||||||
|
3 |
|
ω3 |
ω3 = ω2 |
+ |
ω3 |
|
M дин ср3 |
t3 |
|
t3 |
= t2 |
+ |
t3 |
… |
|
… |
|
… |
|
|
… |
… |
|
… |
|
|
|
|
Достоинство рассмотренного метода состоит в его простоте и наглядности, а точность определяется интервалами разбиения оси скорости ωi .
Иногда кривую динамического момента заменяют не ступенчатой, а ломаной, что позволяет уменьшить число участков. Длительность переходного процесса на каждом участке может быть рассчитана по формуле (2.26).
Для электроприводов некоторых машин и механизмов (кривошипношатунные передачи, манипуляторы и др.) нельзя принимать J = сonst. Уравнение движения в случае зависимости J = f (ϕ) имеет вид:
|
|
M д − M с |
= J |
dω |
+ ω2 |
dJ |
, |
|
|
||||||||
|
|
dt |
|
|
|
|
|||||||||||
|
|
|
|
|
|
2 dϕ |
|
|
|
|
|||||||
где M д = f (ω) , а M с |
может зависеть как от скорости ω и (или) угла поворота |
||||||||||||||||
ϕ , так и от времени t . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
При приближенном анализе динамики процесс разбивается на участки, |
|||||||||||||||||
и уравнение движения записывается в конечных разностях [9]: |
|
||||||||||||||||
|
|
M д ср − M с ср |
= J ср |
ω |
+ |
|
ωср2 |
|
J |
, |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
ϕ |
|
|||||
|
|
t |
2 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
где M д ср , |
M с ср и J ср |
– средние значения моментов на участке; ωср – средняя |
|||||||||||||||
скорость |
вращения. |
Тогда угол поворота |
определяется |
выражением |
|||||||||||||
Δϕ = ωср |
t , а время |
переходного |
процесса |
|
на |
участке рассчитывается по |
|||||||||||
формуле: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J ср ω + |
ωср |
|
J |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
t = |
|
|
|
|
2 |
|
|
|
|
|
|
. |
|
(2.27) |
|
|
|
M д ср − M с ср |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|||||||||
Построение кривой ω = f (t) ведется методом последовательных приближений [9, 14]:
|
44 |
|
|
|
1) |
назначается приращение скорости на участке |
ωi ; |
||
2) |
принимаются приращения M с |
и |
J ; |
|
3) |
рассчитываются приращения t |
и |
ϕ ; |
|
4) |
определяются M с и J по рассчитанным |
ϕ и t . |
||
При недопустимо большом отклонении принятых |
M с |
и J в пункте 2 |
|
от расчетных в пункте 4 (первое приближение) повторяют пункты |
2-4 (второе |
||
приближение) с новыми (уточненными) значениями M с |
и |
J и |
т. д., иначе |
переходят к следующему участку (пункт 1). Уточнение производится путем определения половины разности несовпадающих величин, которая с учетом знака разности суммируется с предварительно принятым значением. Расчеты также удобно сводить в таблицу подобную табл. 2.1.
2.15.Контрольные вопросы
1.Какие элементы образуют механическую часть электропривода?
2.Каков смысл «приведения» моментов сопротивлений и моментов инерции? Какие законы лежат в основе «приведения»?
3.Что такое момент инерции и маховый момент? Какова связь между
ними?
4.На основании каких законов может быть получено уравнение движения привода?
5.В чем отличие уравнений, описывающих поступательное и вращательное движения механических элементов?
6.Что такое установившийся режим работы электропривода?
7.Что понимается под механической характеристикой двигателя и производственного механизма?
8.Что понимается под статической устойчивостью электропривода?
9.Что такое жесткость механической характеристики?
10.В каких режимах могут работать электроприводы?
11.Какой физический смысл имеет электромеханическая постоянная
времени?
3.ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА
3.1.Общие сведения о двигателях постоянного тока
Двигатели постоянного тока (ДПТ) принадлежат к числу коллекторных электрических машин. Они сложны в изготовлении, капризны в эксплуатации (требуют большего ухода по сравнению с электрическими машинами переменного тока). Кроме того, для питания ДПТ необходим источник постоянного тока. Но, несмотря на указанные недостатки, ДПТ находят широкое при-
45
менение в тех отраслях промышленности, где необходим большой диапазон и плавность регулирования (см. разд. 8).
Свойства ДПТ существенно зависят от характера изменения их магнитного потока при изменении нагрузки. На характер изменения магнитного потока, в свою очередь, влияют количество и способ включения обмоток возбуждения, или, как говорят, способ возбуждения двигателей. В зависимости от способа возбуждения различают двигатели [2]: параллельного возбуждения (шунтовые); последовательного возбуждения (сериесные); смешанного возбуждения (компаундные). Кроме того, существуют ДПТ с независимым возбуждением, требующие дополнительного источника постоянного напряжения. Однако характеристики таких двигателей практически не отличаются от шунтовых ДПТ ввиду малого влияния тока возбуждения параллельной обмотки на их свойства, поэтому остановимся на изучении характеристик шунтовых, сериесных и компаундных ДПТ.
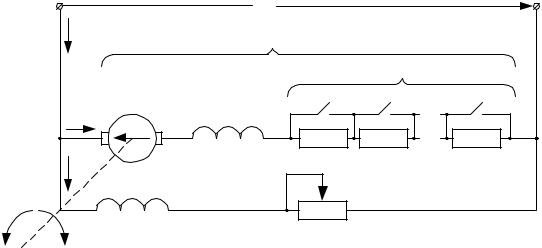
На рис. 3.1 изображена принципиальная схема включения двигателя смешанного возбуждения. Магнитный поток этого двигателя создается двумя обмотками – обмоткой параллельного возбуждения (шунтовой обмоткой) и обмоткой последовательного возбуждения (сериесной обмоткой).
Имея схему двигателя смешанного возбуждения, нетрудно представить схемы включения двух других двигателей. Если исключить мысленно обмотку ОВпос, получим схему включения двигателя параллельного возбуждения, магнитный поток которого будет создаваться обмоткой ОВпар. Если исключить обмотку ОВпар, получим схему включения двигателя последовательного возбуждения, магнитный поток которого будет создаваться обмоткой ОВпос. Далее будут приводиться в основном схемы двигателей смешанного возбуждения, из которых указанным способом легко получить схемы двух других двигателей.
|
|
U |
|
|
|
|
I |
|
Rяц∑ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rдоб∑ |
|
|
Iя |
|
ОВпос |
K1 |
K2 |
... |
Km |
E |
|
|
|
|||
|
|
|
|
... |
|
|
|
|
Rовпос |
|
|
|
|
Iв |
Rяц |
Rдоб1 |
Rдоб2 |
|
Rдобm |
|
ОВпар |
|
R вдоб |
|
|
||
Mд,ωд |
|
|
|
|||
Rовпар |
|
|
|
|
|
|
Mc |
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.1
46
Примем указанное на рис. 3.1 направление угловой скорости ωд и момента M д двигателя за положительное, т. е. ωд > 0 и M д > 0 . Для двигательного режима характерно то, что ток I , потребляемый из сети, ток якоря Iя и ток возбуждения Iв совпадают по направлению с напряжением сети U , а
ЭДС E направлена против тока якоря. Электромагнитный момент M , действующий на якорь двигателя, и ЭДС, индуктируемая в якоре, определяются по формулам:
M д ≈ М = cM ФIя ; |
(3.1) |
E = cEФωд , |
(3.2) |
где cЕ = cМ = |
pN |
– коэффициенты, зависящие от конструктивных особенно- |
|||||
|
|||||||
|
|
|
2pa |
|
|
||
|
стей двигателя; здесь p – число пар полюсов двигателя; |
a и N – чис- |
|||||
|
ло пар параллельных ветвей и число проводников обмотки якоря; |
||||||
Ф – |
магнитный поток одного полюса, Вб; |
|
|||||
Iя |
– |
ток якоря, А; |
|
|
|||
ωд |
– |
угловая скорость вращения якоря, 1/c; |
|
||||
M д ≈ М – момент на валу двигателя, равный электромагнитному моменту |
|||||||
|
|
без учета весьма незначительных потерь в стали якоря, а также меха- |
|||||
|
|
нических и вентиляционных потерь, Н×м; |
|
||||
E – |
ЭДС якоря, В. |
|
|
||||
Если угловая скорость якоря ДПТ заменяется скоростью nд (частотой |
|||||||
вращения), измеряемой в об/мин, то между коэффициентами cM |
и cE суще- |
||||||
ствует следующая зависимость: |
|
|
|||||
|
|
|
|
cМ = 9, 55 × сE . |
|
(3.3) |
|
Ток возбуждения двигателей параллельного и смешанного возбуждения |
|||||||
определяется формулой |
|
|
|||||
|
|
|
|
Iв = |
U |
, |
|
|
|
|
|
Rов пар |
|
||
|
|
|
|
|
|
|
|
где U – напряжение сети, В;
Rов пар – сопротивление обмотки параллельного возбуждения, Ом.
При изменении нагрузки двигателей ток Iв , очевидно, изменяться не будет, поэтому можно считать Iв = const .

47
В отличие от тока Iв ток якоря Iя непосредственно определяется нагрузкой двигателя. Действительно, для установившегося режима работы
M c = M д Iя = Iс ,
где Iс = M с /(cМ Ф) – ток, определяемый статическим моментом.
При работе двигателя вхолостую M c = 0 и, следовательно, M д = 0 . Последнее может быть только в случае, когда Iя = 0 . Увеличение момента M c
сопровождается при установившемся режиме работы соответствующим увеличением момента M д , а значит, и тока Iя . По току якоря можно судить о ве-
личине момента M c , т. е. о степени загрузки двигателя.
Причину изменения тока якоря можно пояснить, пользуясь формулой (3.4), которую легко получить на основании II закона Кирхгофа:
Iя = |
U − E |
= |
U − сE |
Фωд |
, |
(3.4) |
|
Rяц ∑ |
Rяц + Rовпос + Rдоб ∑ |
||||||
|
|
|
|
||||
где Rяц – сопротивление цепи якоря, включающее в себя в общем случае сопротивления обмотки якоря двигателя Rяд , щеток Rщ , обмотки дополнительных полюсов Rдп и компенсационной обмотки Rко ; Rовпос – сопротивление обмотки последовательного возбуждения; Rдоб ∑ = ∑ Rдобi – суммарное сопротивление последовательно включенных m добавочных резисторов Rдобi (i = 1, m ).
При увеличении нагрузки двигателя снижается скорость его вращения, что приводит к уменьшению ЭДС. Последнее и вызывает увеличение тока якоря. Так как при холостом ходе Iя = 0 , то двигатель должен иметь такую
скорость, при которой E = U .
Ток, потребляемый из сети двигателями параллельного и смешанного возбуждения, равен I = Iя + Iв . Для двигателя последовательного возбужде-
ния I = Iя . Очевидно, ток I , так же как и ток Iя , при изменении нагрузки
двигателя не будет оставаться постоянным.
Мощность и ток обмотки параллельного возбуждения невелики. Так, для двигателей параллельного возбуждения мощностью от 5 до 100 кВт номинальный ток возбуждения Iвн ≈ (0, 05 ÷ 0, 01) Iн , где Iн – номинальный ток
двигателей. Учитывая малую величину тока возбуждения, часто считают, что при номинальной нагрузке двигателей параллельного и смешанного возбуждения Iян = Iн .

|
|
|
|
|
|
|
48 |
|
|
|
|
|
|
|
|
|
М |
2 |
3 |
Ф |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
М>Мн |
|
||
Фн 1 |
|
|
|
|
|
|
|
||
|
3 |
|
|
|
|
|
Мн |
|
|
Ф0 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Iя>Iян |
|
Iя1 |
0 |
I |
н |
I |
I |
я |
0 |
I |
Iя |
|
|
|
я2 |
|
|
ян |
|||
|
|
а |
|
|
|
|
|
б |
|
Рис. 3.2
Выше было сказано, что свойства двигателей постоянного тока существенно зависят от характера изменения их магнитного потока. На рис. 3.2, а показан график Ф(Iя ) двигателей параллельного (кривая 1), последователь-
ного (кривая 2) и смешанного (кривая 3) возбуждения. Для удобства сравнения графиков примем, что двигатели имеют одинаковые номинальные значения магнитного потока Фн и тока якоря Iян . Поскольку ток Iя характеризует
степень загрузки двигателей, графики Ф(Iя ) позволяют составить представ-
ление о зависимости потока от нагрузки.
Как видно, у двигателя параллельного возбуждения Ф = const . Изменение магнитного потока двигателей за счет реакции якоря здесь и в дальнейшем не учитывается (наличие компенсационной обмотки). В наибольшем диапазоне при изменении нагрузки изменяется магнитный поток двигателя последовательного возбуждения. Особенностью этого двигателя является то, что на холостом ходу при M = M c = 0 (здесь и далее M д ≈ М ) и Iя = 0 его
поток равен нулю Ф = 0 . У двигателя смешанного возбуждения из-за наличия ОВпар при холостом ходе Ф = Ф0 ¹ 0 . При протекании по обмотке якоря дви-
гателя |
смешанного возбуждения тока противоположного направления |
( Iя < 0 ) |
сериесная обмотка размагничивает машину, а при некотором токе |
Iя1 < 0 оказывается, что Ф = 0 .
Для уменьшения времени пуска и электрического торможения обычно рассчитывают пусковые и тормозные сопротивления так, чтобы получить при пуске и торможении моменты большие, чем номинальный момент двигателя. При этом токи якоря оказываются также больше номинального тока. В связи с этим следует обратить внимание на соотношение магнитных потоков двигателей при Iя2 > Iян . Как видно, при Iя2 > Iян Ф2 > Ф3 > Ф1 .
Характер изменения магнитного потока двигателей оказывает влияние в частности на зависимость между моментом и током якоря двигателей M ( Iя ) .
49
Моментные характеристики M ( Iя ) двигателей параллельного, последовательного и смешанного возбуждения, имеющих одинаковые значения M н и Iян , изображены на рис. 3.2, б (нумерация аналогична рис. 3.2, а).
Наибольший интерес представляет соотношение между моментами двигателей при одном и том же токе Iя > Iян . Как видно, при Iя > Iян
M 2 > M3 > M1 . Относительно больший момент является одной из особенно-
стей и преимуществом двигателя последовательного возбуждения. Больший момент дает возможность, например, произвести пуск двигателя в наиболее короткое время.
Если сравнить токи двигателей при M > M н , то оказывается, что I2 < I3 < I1 . Двигатель последовательного возбуждения будет находиться при
этом в лучших условиях в отношении нагревания и коммутации при меньшей перегрузке по току.
3.2. Естественные характеристики ДПТ
При включении двигателей по схеме, изображенной на рис. 3.1, они будут иметь естественные электромеханические (скоростные) ωe ( Iя ) и меха-
нические характеристики ωe (M ) , если напряжение U равно номинальному
напряжению двигателей, Rдоб ∑ = 0 и Rв доб = 0 .
Уравнение скоростных характеристик нетрудно получить из выражения (3.4), решив его относительно угловой скорости:
ωe |
= |
Uн − Iя (Rяц + Rовпос ) |
= |
Uн |
|
− |
IяRяце |
. |
(3.5) |
|||||
|
|
|
сE Ф |
|
||||||||||
|
|
|
сE Ф |
|
|
|
сE Ф |
|
||||||
Если в уравнении (3.5) заменить ток Iя |
его выражением из формулы |
|||||||||||||
(3.1), получим уравнение естественных механических характеристик |
|
|||||||||||||
|
|
ω = Uн − |
MRяце . |
|
|
|
(3.6) |
|||||||
|
|
e |
|
сE Ф |
|
сE сМ Ф2 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||||||
Хотя уравнения (3.5) и (3.6) справедливы для всех двигателей постоянного тока, скоростные и механические характеристики различных двигателей существенно отличаются одна от другой, что объясняется разным характером изменения магнитного потока. Предположим для удобства сравнения характеристик, что различные двигатели имеют одинаковые величины номинальных скоростей, токов и моментов. У двигателя параллельного возбуждения для естественной характеристики Ф = Фн = const , поэтому скоростная и механическая характери-

|
|
|
|
|
|
|
50 |
|
|
|
|
|
стики этого двигателя прямолинейны (характеристики 1 на рис. 3.3, а и б). При |
||||||||||||
работе двигателя вхолостую ( M = M c |
= 0 , Iя = 0 ) двигатель имеет скорость хо- |
|||||||||||
лостого хода, определяемую первым членом уравнений (3.5) или (3.6): |
||||||||||||
|
|
|
|
w = w |
= |
Uн . |
|
|
|
|
|
|
|
|
|
|
0 |
01 |
|
сE Фн |
|
|
|
|
|
w |
|
|
|
|
|
|
w |
|
|
|
|
|
w03 |
w1 |
|
|
|
|
w03 |
w1 |
|
|
|
|
|
w01 |
|
wн |
|
w |
|
|
w01 |
wн |
|
w |
|
|
|
|
|
|
2 |
1 |
|
|
|
|
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
3 |
|
|
|
|
|
|
3 |
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
I |
<I |
< |
I |
Iя |
|
|
M <M < М |
|
М |
|||
я1 |
ян |
|
я2 |
|
|
|
н |
|
2 |
|||
|
|
а |
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
Рис. 3.3 |
|
|
|
|
|
|
При увеличении нагрузки двигателя его скорость вращения уменьшает- |
||||||||||||
ся. Как видно из выражения (3.5), уменьшение скорости двигателя параллель- |
||||||||||||
ного возбуждения происходит из-за увеличения падения напряжения в сопро- |
||||||||||||
тивлении Rяце . |
|
Изменение или перепад скорости при какой-либо нагрузке |
||||||||||
двигателя параллельного возбуждения определяется вторым членом уравне- |
||||||||||||
ния (3.5) или (3.6): |
|
|
|
|
|
|
|
|
|
|
||
Dw = w |
- w = |
IяRяце |
= |
MRяце |
. |
|
сE сМ Фн2 |
||||
01 |
e |
сE Фн |
|
||
Изменение скорости в процентах при переходе от холостого хода к номинальной нагрузке для двигателей параллельного возбуждения мощностью от 5 до 100 кВт находится примерно в следующих пределах:
Dwн % = ω01 − ωн ×100 % » 1,1 ¸ 3, 5 % .
w01
Как видно, скорость двигателей параллельного возбуждения при изменении нагрузки изменяется незначительно, что объясняется относительно небольшой величиной сопротивления якоря. Важнейшей особенностью двигателей параллельного возбуждения является то, что они имеют жесткие есте-