

8.2 Классификация автоматических регуляторов
АР могут быть классифицированы ПО ЗАКОНУ РЕГУЛИРОВАНИЯ. Под законом регулирования понимается зависимость между отклонением регулируемой переменной от её заданного значения по программе (или заданого значения) и выходной переменной, называемой управляющим воздействием. При этом выражение закона регулирования обычно относится к так называемому идеальному регулятору, т. е. такому, у которого формальный закон регулирования при работе его в автоматической системе строго соблюдается. В реальных условиях эксплуатации закон регулирования соблюдается лишь с известными ограничениями только в нормальных (расчетных) режимах работы.
Различные законы регулирования, отрабатываемые АР, формируются ФУ. Последние, в зависимости от характера закона регулирования, подразделяют на:
1) релейные, отрабатывающие релейный (двухпозиционный) закон регулирования;
2) пропорциональные (П), отрабатывающие пропорциональный закон регулирования;
3) пропорционально-дифференциальные (ПД), отрабатывающие пропорционально-дифференциальный закон регулирования;
4) интегральные (И), отрабатывающие интегральный закон регулирования;
5) пропорционально-интегральные (ПИ), отрабатывающие пропорционально-интегральный закон регулирования;
6) пропорционально-интегрально-дифференциальные (ПИД), отрабатывающие пропорционально-интегрально-дифференциальный закон регулирования.
По ВИДУ ВЫХОДНОГО СИГНАЛА АР могут быть подразделены на регуляторы:
- непрерывного действия;
- дискретного действия.
Под регуляторами непрерывного действия понимаются АР, в которых осуществляется передача, преобразование и воздействие на ОР управляющего воздействия в соответствии с каждым мгновенным значением выходной переменной.
Под АР дискретного действия понимаются регуляторы, в которых происходит процесс преобразования непрерывного сигнала в дискретный, выходная переменная которого имеет дискретную форму.
АР ДИСКРЕТНОГО ДЕЙСТВИЯ подразделяются на АР:
1) релейного;
2) импульсного;
3) релейно-импульсного действия.
Находят применение также АР комбинированного исполнения, состоящие из блоков, выполненных как на дискретных, так и на аналоговых элементах. Например, аналоговые АР в сочетании с программными задающими устройствами, выполненными на элементах цифровой техники и на аналоговых элементах, часто встречаются в современном производстве.
По закону регулирования цифровые АР комбинированного исполнения подразделяются, аналогично, на АР непрерывного действия с П, И, ПИ, ПД и ПИД-законами регулирования.
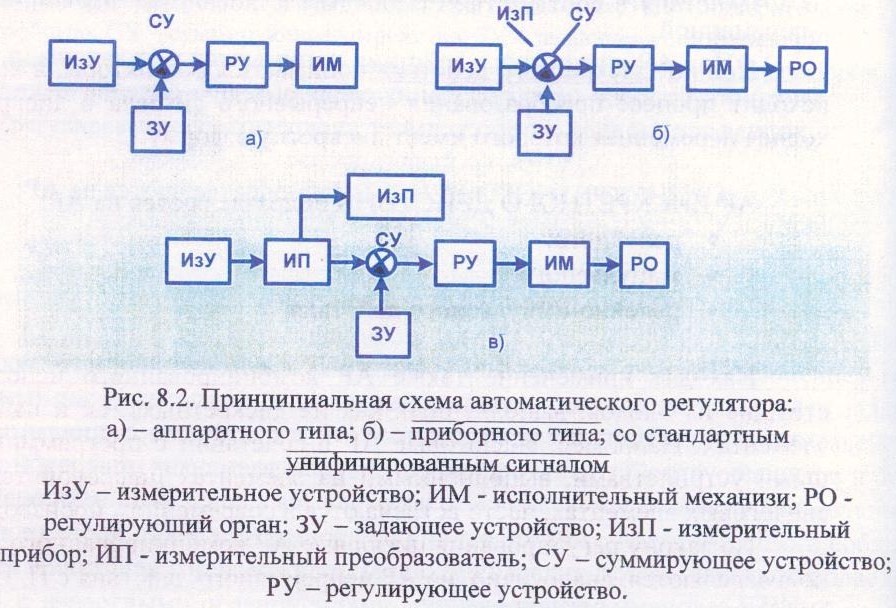
ПО ПОСТРОЕНИЮ ПРИНЦИПИАЛЬНЫХ СХЕМ АР подразделяют на:
- регуляторы аппаратного типа;
- приборного типа;
- со стандартным унифицированным сигналом (рис. 8.2).
Достоинство АР аппаратного типа - независимость контура контроля oт контура регулирования, а, следовательно, и большая надежность, так как выход из строя одного контура не влияет на работу другого. Недостаток таких АР - необходимость наличия двух отдельных измерительных преобразователей (ИП). АР приборного типа отличаются от первых простотой конструкции, так как включают только один ИП. Однако они менее надежны в работе, так как выход из строя одного блока лишает систему как контроля, так и регулирования. АР со стандартным унифицированные сигналом определенным образом объединяют в себе достоинства АР аппаратного и приборного типов, при условии, что ИП является достаточно надежным устройством; в этом регуляторе разделены и независимы контуры контроля и регулирования.
Внедрение принципов унификации, агрегатного и блочно-модульного построения всех элементов и устройств, позволяющих легко комплектовать из них автоматические системы контроля, регулирования различных технологических процессов и управления ими, обуславливает развитие и использование в широких масштабах АР, в том числе, и программных, со стандартным унифицированным сигналом.
На подобных принципах создается Государственная система промышленных приборов и средств автоматизации (ГСП) и универсальная международная система автоматического контроля, регулирования и управления (VPC), создаваемая в рамках государств. В качестве стандартного унифицированного сигнала применяется постоянный ток 4-20 мА.
Таким образом, наиболее перспективны АР со стандартным унифицированным сигналом, однако к настоящему времени в большинстве случаев, особенно для решения частных задач, широко применяются АР аппаратного, а также приборного типов.
Ряд целлюлозно-бумажных и лесохимических производств, для автоматизации которых используются программные регуляторы, предъявляют весьма высокие требования к стабильности поддержания управляемой переменной и воспроизводимости программ от процесса к процессу. Реализация таких технических требований с использованием обычных программных АР затруднена, а при более высоких требованиях вообще невозможна. Подобное положение привело к применению и развитию нового класса ПРЕЦИЗИОННЫХ ПРОГРАММНЫХ АР, обеспечивающих достижение высокой стабильности и воспроизводимости регулируемой переменной в определенном диапазоне.
Таким образом, АР могут быть подразделены на простые и прецизионные регуляторы. Первые не обладают повышенными техническими характеристиками в отношении стабильности поддержания или воспроизводимости регулируемой переменной и могут быть условно названы «грубыми». Последние - прецизионные АР в свою очередь подразделяются на регуляторы с программированием по входу или по выходу ИзУ.
ПО КОЛИЧЕСТВУ ТОЧЕК РЕГУЛИРОВАНИЯ АР могут быть подразделены на:
1) одноканальные;
2) многоканальные.
Многоканальными регуляторами называются устройства, предназначенные для автоматического регулирования некоторого числа параметров путем воздействия на ряд РО, с многократным использованием хотя бы одного из функциональных блоков (кроме источников питания). Применение многоканального регулирования, в том числе и программного, связано с определенными технико-экономическими выгодами, в числе которых надо отметить уменьшение количества используемого оборудования, сокращение размеров щитов и площадей щитовых помещений, уменьшение стоимости эксплуатации, увеличение вероятности безотказной работы, уменьшение времени, необходимого для ремонта. Многоканальное регулирование особенно эффективно при управлении группой однотипных ОР, у которых постоянная времени достаточно велика (десятки или сотни секунд) по отношению к циклу обегания регулятора.
Программные многоканальные АР строятся по схемам обычных многоканальных регуляторов с заменой ЗУ на программное ЗУ. Принципиально программные многоканальные АР могут быть выполнены с одинаковой для всех каналов программой или с индивидуальной программой для каждого канала. В первом случае может быть использовано одно программное ЗУ, выходной сигнал которого при помощи переключающих устройств будет поступать последовательно в каждый канал регулирования.
Во втором случае необходимо наличие отдельного программного ЗУ в каждом канале.
Регуляторы обладают большим разнообразием по конструктивному исполнению. Выше (рис. 8.2) было показано, что отдельные основные функциональные блоки АР очень часто конструктивно (а иногда и схемно) выполняются совместно с другими функциональными узлами. Поэтому регуляторы по особенностям конструкции могут быть подразделены следующие основные группы:
1) с ЗУ, встроенным в ИзП;
2) с ЗУ, встроенным в РУ;
3) с отдельным ЗУ.
В АР приборного типа ЗУ, как правило, встраивается в ИзП (pис. 8.2,а). Часто в этот же прибор встраивается и РУ (особенно двух- и трехпозиционное). При этом используется простое реохордное СУ, сравнивающее заданную с измеренной переменной, с подачей разностного сигнала, снимаемого с движков реохорда, на вход РУ.
В АР со стандартным унифицированным сигналом большей частью используется отдельное ЗУ (рис. 6.2, в); это наилучшим образом соответствует принципам унификации блочно-модульного построения, заложенного в основу подобных систем. При таком построении обеспечивается возможность быстрой и удобной замены одного ЗУ (особенно программного) другим или вообще другим функциональным блоком (например, блоком ручного задания). РУ со встроенным ЗУ наиболее часто встречается в современных регуляторах.
Таковы основные характеристики регуляторов, которые могут служить в качестве отличительных классификационных признаков.
8.3 ЗАКОНЫ РЕГУЛИРОВАНИЯ
8.3.1 РЕЛЕЙНЫЙ ЗАКОН РЕГУЛИРОВАНИЯ
Р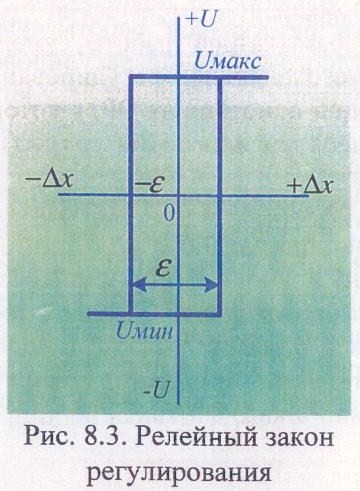 ассмотрим
наиболее простой релейный закон
регулирования. Он может быть обработан
АР, использующим лишь сам факт наличия
отклонения текущего значения регулируемой
переменной от задания при условии,
что величина рассогласования больше
зоны неоднозначности регулятора.
Релейный закон записывается так:
ассмотрим
наиболее простой релейный закон
регулирования. Он может быть обработан
АР, использующим лишь сам факт наличия
отклонения текущего значения регулируемой
переменной от задания при условии,
что величина рассогласования больше
зоны неоднозначности регулятора.
Релейный закон записывается так:
где - выходная переменная АР (регулирующее воздействие);
![]() и
и
![]() - соответственно, минимальное и
максимальное значения выходной
переменной;
- соответственно, минимальное и
максимальное значения выходной
переменной;
![]() -
скорость
отклонения
-
скорость
отклонения
![]() регулируемом
переменной х
от
заданного значения;
регулируемом
переменной х
от
заданного значения;
- зона неоднозначности.
Графическое изображение релейного закона регулирования показано на рис. 8.3. При изменении рассогласования на величину большую зоны неоднозначности, выходной сигнал релейного регулятора может иметь два дискретных значения - минимальное или максимальное. Если период срабатывания АР (период, в течение которого он придет к значению, обусловленному законом регулирования) будет малым, то даже при не значительном отклонении от РО займет одно из крайних положений: откроется или закроется.
8.3.2 П-ЗАКОН РЕГУЛИРОВАНИЯ
Отработать
П-закон регулирования АР может при
использовании им в качестве показателя
хода технологического процесса величины
и знака рассогласования, т. е.
![]() .
П-закон регулирования записывается
так:
.
П-закон регулирования записывается
так:
![]()
где
![]() - коэффициент пропорциональности
(усиления).
- коэффициент пропорциональности
(усиления).
З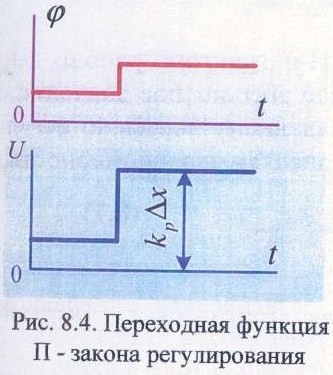 нак
минус в уравнении (8.2) указывает на то,
что во время работы автоматической
системы входной сигнал АР приводит к
изменению выходного сигнала в обратном
направлении.
нак
минус в уравнении (8.2) указывает на то,
что во время работы автоматической
системы входной сигнал АР приводит к
изменению выходного сигнала в обратном
направлении.
Как видно из уравнения (8.2), изменение входного сигнала АР вызывает пропорциональное изменение выходного сигнала с коэффициентом пропорциональности . принято называть коэффициентом усиления регулятора. На этом основании пропорциональная зависимость, существующая между входным сигналом АР и выходным, называется пропорциональным П-законом регулирования, а регулятор - пропорциональным или сокращенно П-регулятором.
Переходная функция П-регулятора приведена на рис. 8.4. Коэффициент усиления П-регулятора часто выражается его обратной величиной, выраженной в процентах. Последняя называется статизмом или диапазоном дросселирования П-регулятора и записывается так:

где Д - статизм, или диапазон дросселирования.
Числовое значение статизма определяется в виде интервала изменения регулируемой переменной (выраженного в процентах), вызывающего изменение выходного сигнала П-регулятора от одного крайнего значения до другого, или перемещения ИМ из одного крайнего положения в другое.
Коэффициент
усиления есть параметр настройки
П-регулятора. Кроме показателей
и
статизма П-регулятор характеризуется
абсолютной
![]() и относительной
статическими
неравномерностями.
и относительной
статическими
неравномерностями.
Под
абсолютной статической неравномерностью
П-регулятора принято понимать разность
между установившимися значениями
регулируемых переменных
![]() и
и
![]() при
возмущениях
при
возмущениях
![]() и
и
![]() действующих на OP. Абсолютная
статическая неравномерность П-регулятора
записывается так:
действующих на OP. Абсолютная
статическая неравномерность П-регулятора
записывается так:
![]()
где
![]() и
и
![]() - соответственно,
установившиеся значения регулируемой
переменной при возмущениях
и
- соответственно,
установившиеся значения регулируемой
переменной при возмущениях
и
Максимальное
значение абсолютной статической
неравномерности регулятора имеет место
при изменении возмущения от
![]() до
до
![]() :
:
![]()
Статическую
неравномерность П-регулятора удобно
выразить в относительных величинах. В
этом случае абсолютное значение
статической неравномерности обычно
относят к заданному значению регулируемой
переменной
![]() .
Тогда относительная статическая
неравномерность:
.
Тогда относительная статическая
неравномерность:
![]()
Максимальная относительная статическая неравномерность П-регулятора:
![]()
Полагая, что возмущение, действующее на ОР, изменяется пропорционально изменению выходной переменной П-регулятора, можно заметить, что величина статической неравномерности П-регулятора зависит обратно пропорционально от величины : чем больше , тем меньше и , и наоборот.
Наличие статической неравномерности является недостатком регулятора, поскольку значение регулируемой переменной меняется с изменением возмущающего воздействия. С другой стороны, наличие статизма делает систему с П-регулятором более устойчивой по сравнению с системой, имеющей, например, И-регулятор. В этом достоинство П-регулятора.
8.3.3 ПД-ЗАКОН РЕГУЛИРОВАНИЯ
О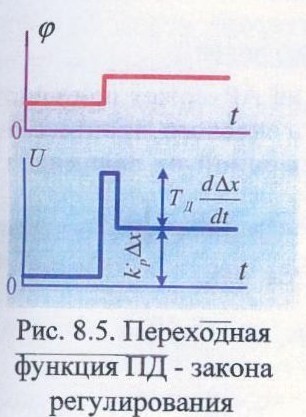 тработать
ПД-закон регулирования АР может при
использовании им в качестве показателей
хода технологического процесса величины
и знака рассогласования
тработать
ПД-закон регулирования АР может при
использовании им в качестве показателей
хода технологического процесса величины
и знака рассогласования
![]() и скорости от этого рассогласования
и скорости от этого рассогласования
![]() .
Использование скорости отклонения
регулируемой переменной от задания в
качестве дополнительной составляющей
входного сигнала АР означает введение
в закон регулирования предваряющего
воздействия. По этой причине такие АР
называют регуляторами с предварением
или ПД-регуляторами.
.
Использование скорости отклонения
регулируемой переменной от задания в
качестве дополнительной составляющей
входного сигнала АР означает введение
в закон регулирования предваряющего
воздействия. По этой причине такие АР
называют регуляторами с предварением
или ПД-регуляторами.
П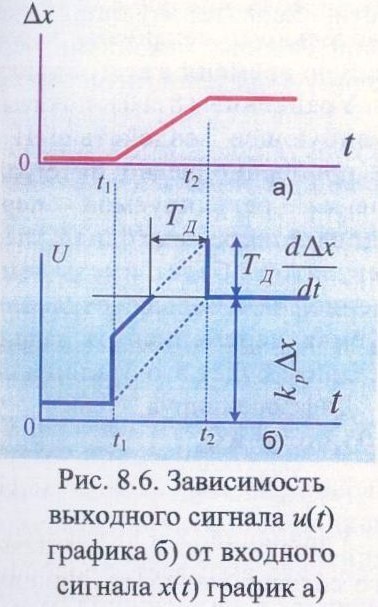 Д-закон
регулирования представляет собой сумму
воздействий пропорциональной и
дифференциальной составляющих и
записывается так:
Д-закон
регулирования представляет собой сумму
воздействий пропорциональной и
дифференциальной составляющих и
записывается так:
![]()
где
![]() -
коэффициент пропорциональности
дифференциальной составляющей, называемой
постоянной времени дифференцирования
или времени предварения.
-
коэффициент пропорциональности
дифференциальной составляющей, называемой
постоянной времени дифференцирования
или времени предварения.
Переходная функция ПД-регулятора показана на рис. 8.5. Из-за дополнительного введения в П-закон регулирования дифференциальной составляющей значение выходного сигнала в переходном режиме существенно увеличивается по сравнению с выходным сигналом П-регулятора. Более наглядно эффект предварения в ПД-регуляторе показан на рис. 8.6, где изменение входного сигнала имеет плавный характер.
На рис. 8.6, б показаны графики выходного сигнала ПД-регулятора (сплошная линия) и П-регулятора (пунктирная линия). Как видно, значение выходного сигнала ПД-регулятора предваряет (опережает) значение выходного сигнала П-регулятора на время .
Опережение выходного сигнала ПД-регулятора по сравнению с сигналом П-регулятора имеет большое значение для тех объектов,
которые обладают существенным транспортным запаздыванием. Недостатком ПД-регулятора является наличие в нем статической неравномерности в установившемся режиме, отрицательное влияние которой на качество регулирования такое же, как и в П-регуляторе.
8.3.4 И-ЗАКОН РЕГУЛИРОВАНИЯ
Отработать
И-закон регулирования АР может при
использовани им в качестве показателя
хода технологического процесса отклонения
текущего значения регулируемой переменной
от задания, т. е.
за время
![]() и
направления этого отклонения, т. е.
и
направления этого отклонения, т. е.
![]()
И-закон регулирования записывается так:
![]()
где
![]() - коэффициент
пропорциональности, характеризующий
скорость исполнительного механизма
через его постоянную времени интегрирования
- коэффициент
пропорциональности, характеризующий
скорость исполнительного механизма
через его постоянную времени интегрирования
![]() .
.
Уравнение (8.10) показывает, что регулирующее воздействие И - регулятора пропорционально интегралу от отклонения регулируемой переменной. Следовательно, выходная переменная И-регулятора будет иметь тем большее значение, чем больше отклонится peгyлируемая переменная от задания и чем длительнее будет это отклонение.
Дифференцируя уравнение(8.10), получим:
![]()
Уравнение (8.11) показывает, что в И-регуляторе изменение входного сигнала вызывает, пропорциональное изменение скорости выходного сигнала, а не значения этого сигнала, (как в П-регуляторе).
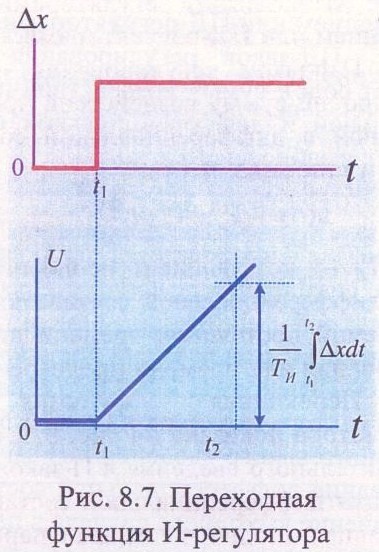
Переходная функция И-регулятора (рис. 8.7) представляет собой прямую линию, угол наклона которой к оси абсцисс зависит от значения входного сигнала. При плавном изменении последнего выходной сигнал И-регулятора также изменяется плавно со скоростью пропорциональной значению входного сигнала в данный момент времени.
Постоянная
времени интегрирования - параметр
настройки И-регулятора. Числовое значение
ее равно времени, в течение которого РО
переместится от одного крайнего положения
в другое при максимальном значении
(при
![]() в
относительных единицах). Из уравнения
(8.11) вытекает, что различному положению
РО могут в различное время соответствовать
различные значения регулируемой
переменной или, наоборот, одно и то же
значение регулируемой переменной может
иметь место при различных положениях
РО. На этом основании регуляторы,
отрабатывающие И-закон регулирования,
принято называть астатическими.
в
относительных единицах). Из уравнения
(8.11) вытекает, что различному положению
РО могут в различное время соответствовать
различные значения регулируемой
переменной или, наоборот, одно и то же
значение регулируемой переменной может
иметь место при различных положениях
РО. На этом основании регуляторы,
отрабатывающие И-закон регулирования,
принято называть астатическими.
При отклонении регулируемой переменной от задания И-регулятор будет перемещать РО до тех пор, пока регулируемая переменная не остановится на заданном значении. Таким образом, И-регулятор поддерживает установившееся значение регулируемой переменной вне зависимости от возмущения, действующего на объект.
Положительная особенность И-регулятора - отсутствие статической неравномерности. Недостатки И-регулятора обусловлены его динамическими свойствами. Как бы ни было мало отклонение регулируемой переменной от задания, И-регулятор будет (хотя и медленно) продолжать перемещать РО вплоть до крайнего положения; направление движения РО изменится лишь тогда, когда текущее значение регулируемой переменной переходит через заданное значение.
Регуляторы с И-законом регулирования как самостоятельные устройства, в настоящее время не изготавливаются. Эти устройства получили широкое распространение в совокупности с устройствами, отрабатывающими ПИ и ПИД-законы регулирования.
8.3.5 ПИ-ЗАКОН РЕГУЛИРОВАНИЯ
Сравнение П- и И-регуляторов показывает, что первые имеют преимущество по динамическим свойствам и обеспечивают лучший переходный процесс регулирования, а преимущества вторых обусловлены отсутствием статической неравномерности, т. е. лучшими статическими свойствами в установившихся режимах. Из этого логически вытекает целесообразность выполнения АР, которые отрабатывают ПИ-закон регулирования.
Отработать ПИ-закон регулирования АР может при одновременном использовании им в качестве показателей хода технологического процесса значения и знака рассогласования и интеграла от этого рассогласования
Таким образом, ПИ-закон регулирования представляет собой сумму воздействий пропорциональной и интегральной составляющих и записывается уравнениями:
для АР с независимыми настройками:

а для АР с зависимыми настройками:

где
![]() -
время изодрома.
-
время изодрома.
В
уравнениях (8.12) и (8.13) величина
![]() - пропорциональная составляющая, а
величина
- пропорциональная составляющая, а
величина
![]() -
интегральная составляющая ПИ-закона
регулирования.
-
интегральная составляющая ПИ-закона
регулирования.
М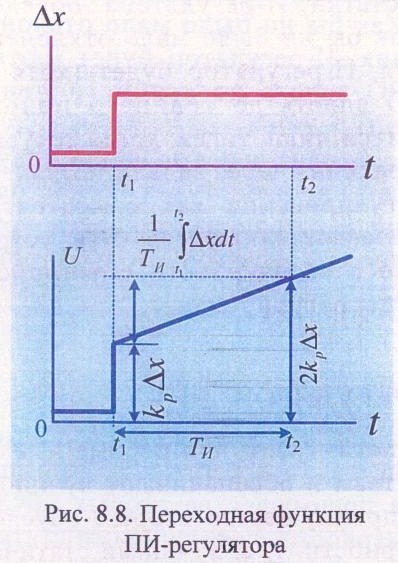 ежду
величиной
и
величинами
и
ежду
величиной
и
величинами
и
![]() существует
такая зависимость:
существует
такая зависимость:
![]() .
.
Переходная
функция ПИ-регулятора показана на рис.
8.8. Уравнения (8.12) и (8.13), а также график
переходной функции (рис. 8.8) показывают,
что регулирующее воздействие ПИ-регулятора
пропорционально отклонению регулируемой
переменной от задания и интегралу от
этого отклонения во времени. На рис. 8.8
выделен участок, на котором за время
![]() ,
интегральная составляющая регулирующего
воздействия достигает значения равного
пропорциональной составляющей, т. е.
равной
,
интегральная составляющая регулирующего
воздействия достигает значения равного
пропорциональной составляющей, т. е.
равной
![]() .
Соответственно этому сигнал регулирующего
воздействия (рис. 8.8) ПИ-регулятора за
время
удвоится по сравнению с выходным сигналом
пропорциональной составляющей.
.
Соответственно этому сигнал регулирующего
воздействия (рис. 8.8) ПИ-регулятора за
время
удвоится по сравнению с выходным сигналом
пропорциональной составляющей.
На этом основании время принято называть временем удвоения.
Таким образом ПИ-регулятор поддерживает постоянное установившееся значение регулируемой переменной вне зависимости от возмущения, действующего на ОР. При отклонении текущего значения регулируемой переменной от задания ПИ-регулятор в начальный момент времени переместит РО на величину пропорциональную отклонению, но если при этом регулируемая переменная не придет к заданному значению,
то он будет продолжать перемещать РО до тех пор, пока регулируемая переменная не достигнет своего заданного значения.
Коэффициент усиления и время изодрома - параметры настройки ПИ-регулятора. При малом значении ПИ-регулятор может работать с объектом, имеющим существенное запаздывание. Малое значение обусловливает также и малое регулирующее воздействие регулятора на ОР, что предотвращает нежелательное перерегулирование. Вместе с тем благодаря наличию изодрома регулирующее воздействие ПИ-регулятора при малом значении будет, хотя и медленно, продолжаться до тех пор, пока текущее значение регулируемой переменной не станет равным заданному.
8.3.6 ПИД-ЗАКОН РЕГУЛИРОВАНИЯ
П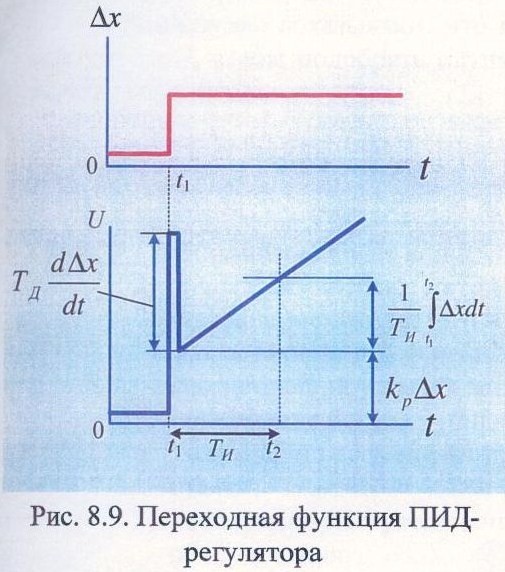 ри
рассмотрении ПД- и ПИ-регуляторов были
показаны методы формирования
комбинированных ПД- и ПИ-законов
регулирования, а также преимущества
ПД-регуляторов по сравнению с
П-регуляторами. Из преимуществ ПД- и
ПИ-регуляторов логически вытекает
целесообразность выполнения АР,
отрабатывающих ПИД-закон регулирования.
Отработать этот закон АР может при
использовании им в качестве показателей
хода технологического процесса значения
и знака рассогласования
,
а также производной
ри
рассмотрении ПД- и ПИ-регуляторов были
показаны методы формирования
комбинированных ПД- и ПИ-законов
регулирования, а также преимущества
ПД-регуляторов по сравнению с
П-регуляторами. Из преимуществ ПД- и
ПИ-регуляторов логически вытекает
целесообразность выполнения АР,
отрабатывающих ПИД-закон регулирования.
Отработать этот закон АР может при
использовании им в качестве показателей
хода технологического процесса значения
и знака рассогласования
,
а также производной
![]() и интеграла
и интеграла
![]() от этого рассогласования.
от этого рассогласования.
Таким образом, ПИД-закон регулирования представляет собой сумму воздействий пропорциональной, интегральной и дифференциальной составляющих и записывается уравнением вида:

В уравнении (8.14) величина - пропорциональная составляющая;
![]() -
интегральная составляющая;
-
интегральная составляющая;
![]() -
дифференциальная составляющая ПИД-закона
регулирования.
-
дифференциальная составляющая ПИД-закона
регулирования.
Из уравнения (8.14), а также из графика переходной функции (рис. 8.9) ПИД-регулятора видно, что ПИД-регуляторы обладают cущественными преимуществами по сравнению с ПД- и ПИ-регуляторами. Преимущество ПИД-регуляторов по сравнению с ПД-регуляторами обусловливается отсутствием остаточной статической неравномерности, а преимущество их по сравнению с ПИ-регуляторами состоит в отработке предваряющего воздействия.
Из всех рассмотренных выше АР ПИД-регуляторы наиболее сложны по принципу действия и по устройству. Поэтому их целесообразно применять лишь для ОР, обладающих большим транспортным запаздыванием и в которых по условиям ведения технологического процесса не допускается остаточное отклонение регулируемой переменной.