

Интегральные оценки качества. Первая интегральная оценка:
![]() .
(6.8)
.
(6.8)
Чем меньше интеграл, тем выше качество регулирования.
Однако, в случае колебательного переходного процесса интеграл (6.8) представляет собой алгебраическую сумму площадей, ограниченных кривой переходного процесса h(t) и прямой h = h(∞) . Отдельные площади суммируются с разными знаками. Интеграл получается минимальным при неудовлетворительном переходном процессе, рис. 6.9 . Интеграл (6.8) дает правильное представление о переходном процессе только в случае монотонного хода кривой (например, как на рис. 6.3).
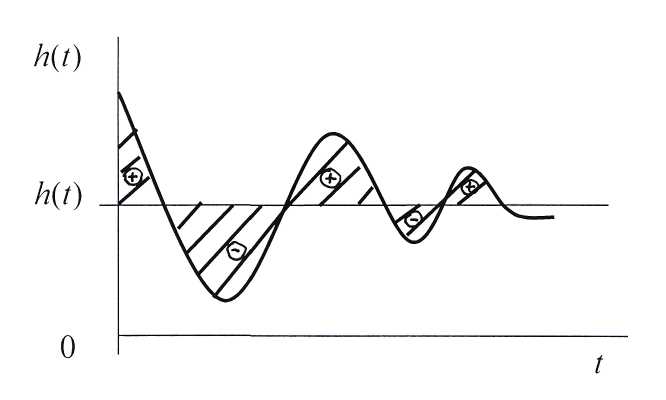
Рис. 6.9. Площади, которые учитывает интеграл (6.8) .
Вторая интегральная оценка:
![]() .
(6.9)
.
(6.9)
(Интегральная квадратичная ошибка регулирования).
Интеграл (6.9) тоже суммирует площади , расположенные над и под абсциссой h = h(∞) . Но в силу квадратичности функции, все слагаемые положительные.
Чем меньше интеграл J2 , тем выше качество регулирования.
Преимущество интегральной оценки J2 в том, что она применима к колебательным процессам.
Третья интегральная оценка учитывает плавность протекания процесса.
![]() . (6.10)
. (6.10)
τ – постоянная, имеющая размерность времени. Плавность измерения регулируемого параметра достигается за счет производной dy/dt.
Третья интегральная оценка применима для характеристики как монотонного, так и колебательного процесса. Неудобство применения оценки (6.10) в том, что должно быть заранее известна постоянная τ.
6.3. Чувствительность к изменению
параметров
Объект управления подвержен влиянию окружающей среды, старению, отсутствию точной информации о его параметрах. В процессе регулирования эти факторы приводят к отклонению выходной величины от желаемого значения. Поэтому чувствительность системы управления к изменению параметров играет важную роль.
Параметры системы содержатся в W(p) и Kос(p) . В случае замкнутой системы, если W(p) Kос(p) > 1 на порядок, имеем:
![]() .
(6.11)
.
(6.11)
Следовательно, на регулируемую величину влияет только передаточная функция канала обратной связи Kос(p) , которая может быть и константой. Когда Kос(p) = 1 , выходная величина в точности равна заданной. Это идеальный случай. Усиление неравенства W(p) Kос(p) > 1 делает систему сильно колебательной и даже может привести к потере устойчивости. Однако, увеличением W(p) Kос(p) до определенного предела, можно снизить влияние изменения параметров на управление. Это – одно из преимуществ систем с обратной связью.
Пусть изменение параметров объекта вызвало изменение передаточной функции объекта на величину ΔW(p) . Передаточная функция стала равной W0 + ΔW(p) . Соответствующее изменение выходной величины обозначим как Y0(p) + ΔY(p) .
В разомкнутой системе изменение выходной величины будет пропорционально изменению передаточной функции объекта:
![]() .
.
В замкнутой системе будет по-другому. Запишем операторное уравнение для объекта управления:
![]() ,
,
где W0(p) – передаточная функция объекта до изменения параметров, Кос(р) – передаточная функция звена обратной связи. Заменяя
![]() ,
,
перенеся его в правую часть и приведя дроби к общему знаменателю, получим:
![]()
Если W0 Koc > ΔW Koc на порядок, как это часто имеет место, то
![]() (6.12)
(6.12)
Таким
образом в замкнутой системе изменение
регулируемой величины, вызванное
изменением параметров системы, уменьшается
в
![]() раз.
раз.
Чувствительность
системы S
определяется как отношение относительного
изменения передаточной функции замкнутой
системы
![]() к относительному изменению передаточной
функции объекта:
к относительному изменению передаточной
функции объекта:
![]() .
.
Переходя к пределу, получаем:
![]() .
(6.13)
.
(6.13)
Сравним чувствительности замкнутой и разомкнутой систем. Замкнутая система имеет передаточную функцию
![]() .
.
Чувствительность замкнутой системы к изменению передаточной функции объекта равна
![]() . (6.14)
. (6.14)
Чувствительность разомкнутой системы
![]() .
.
Сравнение показывает, что чувствительность замкнутой системы меньше чувствительности разомкнутой системы, так как величина 1 + W(p) Kос(p) >> 1.
Чувствительность замкнутой системы к изменению передаточной функции звена обратной связи Кос(р) равна
![]() .
.
Если произведение WK достаточно велико, чувствительность становится равной единице. Система реагирует на изменение параметров звена обратной связи как будто она разомкнутая, то есть изменения передаточной функции Koc непосредственно сказываются на выходной величине. Отсюда практический вывод: звено обратной связи должно обладать стабильными характеристиками, не зависящими от внешних факторов.
Чувствительность можно определять по отношению к одному из параметров передаточной функции объекта. Пусть параметром, подверженным влиянию внешних факторов, будет λ (это Т или К , или что-то другое) .
![]()
Пример 6.3.
Передаточная функция разомкнутой системы
W = k1
Выяснить, во сколько раз понизится чувствительность замкну той системы по сравнению с разомкнутой системой, если включить жесткую обратную связь с коэффициентом усиления k2 ?
Сделать оценку для k1 = 100, k2 = 10 .
Чувствительность разомкнутой системы
![]() .
.
Замкнутая
система имеет передаточную функцию
![]() .
По условию задачи, Кос
= k2
. Чувствительность замкнутой системы,
следовательно,
.
По условию задачи, Кос
= k2
. Чувствительность замкнутой системы,
следовательно,
![]() .
.
Сразу
видно, что если k1
k2
велико,
![]() мало. Для заданных k1
и
k2
мало. Для заданных k1
и
k2
![]() .
.
То есть в 1000 раз меньше, чем чувствительность разомкнутой системы.