

3.5. Силы, действующие на транспортное средство
При поступательном движении на объект в общем действуют четыре группы сил:
- полезные силы,
- гравитационные силы,
- силы сопротивления движению,
- гидроаэроподъемные силы.
3.5.1. Полезные силы
Полезными называются силы, которые обеспечивают движение транспортного средства (или просто объекта) по заданной траектории. В сервисных системах могут использоваться и транспортные средства (грузовые автомобили, автобусы, подъемно-транспортные средства и др.). В транспортных средствах полезные силы создаются в результате преобразования энергии, потребляемой от внешнего источника, в механическую работу. Это преобразование осуществляется в машинах, которые называют двигателями. Для непосредственного использования механической энергии с целью перемещения транспортного средства к двигателю присоединяется специальное устройство, называемое движителем. В качестве движителей в современных транспортных средствах используются колеса, винты (гребные и воздушные) и профильные каналы.
Полезная сила в транспортных средствах
представляет собой реактивное тяговое
усилие
![]() .
Это можно показать на примере такого
движителя как колесо.
.
Это можно показать на примере такого
движителя как колесо.
От двигателя (рис.3.3) механическая энергия
![]() ,
полученная в результате преобразования
тепловой энергии, создает на валу
крутящий момент
,
полученная в результате преобразования
тепловой энергии, создает на валу
крутящий момент![]() .
Благодаря этому, колесо, закрепленное
на оси, получает окружное усилие
.
С этой силой колесо воздействует на
поверхность дороги, а дорога отвечает
реакцией
,
т.е.
.
Благодаря этому, колесо, закрепленное
на оси, получает окружное усилие
.
С этой силой колесо воздействует на
поверхность дороги, а дорога отвечает
реакцией
,
т.е.
![]() .
.
На рис.3.4 показана схема получения
тягового усилия с помощью винта (гребного
или воздушного). В этом случае механическая
энергия
,
подведенная от двигателя, преобразуется
во вращательное движение профильных
лопастей винта. Лопасти винта, действуя
на среду с силой
![]() ,
отбрасывают со скоростью
,
отбрасывают со скоростью
![]() некоторую массу окружающей среды (воды
или воздуха). С такой же реактивной силой
среда действует на винт и жестко связанное
с ним транспортное средство, приводя
его в движение.
некоторую массу окружающей среды (воды
или воздуха). С такой же реактивной силой
среда действует на винт и жестко связанное
с ним транспортное средство, приводя
его в движение.
На рис.3.5 приведена схема получения тягового усилия с помощью движителя, выполненного в виде профильного канала.
Жидкое или газообразное рабочее тело поступает в канал, профиль которого делается таким, чтобы скорость потока росла. На примере изменения скорости течения воды в реке видно, что для увеличения скорости потока рабочего тела необходимо иметь сужающийся канал. Проталкивание рабочего тела через профильный канал осуществляется за счет приложения силы , являющейся результатом использования механической энергии, выработанной в двигателе. Согласно третьему закону механики этой активной силе, приложенной к рабочему телу, соответствует реактивная сила, равная по модулю активной силе и противоположно направленная к ней, которая приложена к корпусу двигателя, жестко связанному с транспортным средством.

Рис. 3.3. Схема получения тяги с помощью колеса
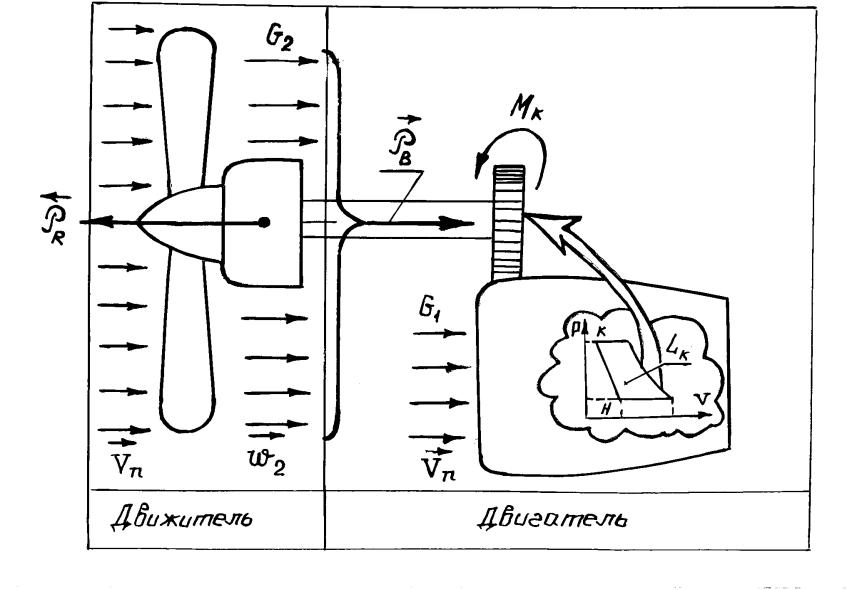
Рис. 3.4. Схема получения тяги с помощью винта
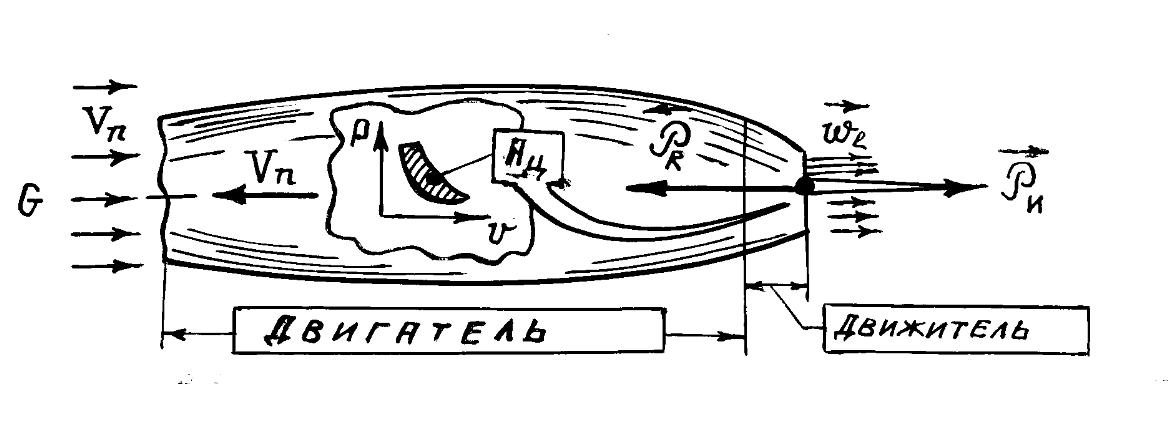
Рис. 3.5. Схема получения тягового усилия с помощью
движителя, выполненного в виде профильного канала