

2.2.7. Выбор плоскости обработки
При выполнении ряда операций, например, коррекции радиуса или длины режущего инструмента, введение эквидистанты и при ряде других операций из трех плоскостей (xy, xz, yz) выбирается одна плоскость с двумя осями. Для задания выбора плоскости используются команды:
для плоскости xy команда G17;
для плоскости xz команда G18;
для плоскости yz команда G19.
2.2.8. Линейная интерполяция
Для выполнения линейной интерполяции в управляющей программе необходимо задать:
8.1) скорость подачи режущего инструмента;
8.2) признак линейной интерполяции G1.
8.3) геометрическую информацию в мм:
при абсолютной системе G90 координаты конечной опорной точки траектории относительно начала системы координат детали (станка); знаки при геометрической информации определяются номером квадранта, в котором происходит перемещение;
при относительной системе G91 координаты конечной опорной точки относительно начальной опорной точки траектории; знаки при геометрической информации определяются направлением движения режущего инструмента вдоль координатных осей.
2.2.9. Круговая интерполяция
Круговая интерполяция может быть задана четырьмя методами:
через центр окружности и конечную опорную точку траектории;
через радиус окружности и конечную опорную точку траектории;
через угол и конечную опорную точку траектории;
через центр окружности и угол.
2.2.9.1. Для задания круговой интерполяции через центр окружности и конечную точку траектории (рис. 2.2.1) в управляющей программе необходимо задать:
скорость подачи режущего инструмента;
признак круговой интерполяции:
G2 круговая интерполяция, движение режущего инструмента по часовой стрелке;
G3 круговая интерполяция, движение режущего инструмента против часовой стрелки.
геометрическую информацию в мм:
при абсолютной системе G90 координаты конечной опорной точки дуги относительно центра системы координат детали (или станка); знак при геометрической информации определяется номером квадранта;
при относительной системе G91 координаты конечной опорной точки дуги относительно начальной опорной точки дуги; знак при геометрической информации определяется направлением движения вдоль осей;
проекции векторов на оси системы координат; вектора должны соединять начальную опорную точку траектории с центром дуги окружности; знак при проекции определяется направлением вектора вдоль оси; адреса проекций векторов: по оси x I, по оси y J, по оси z K.
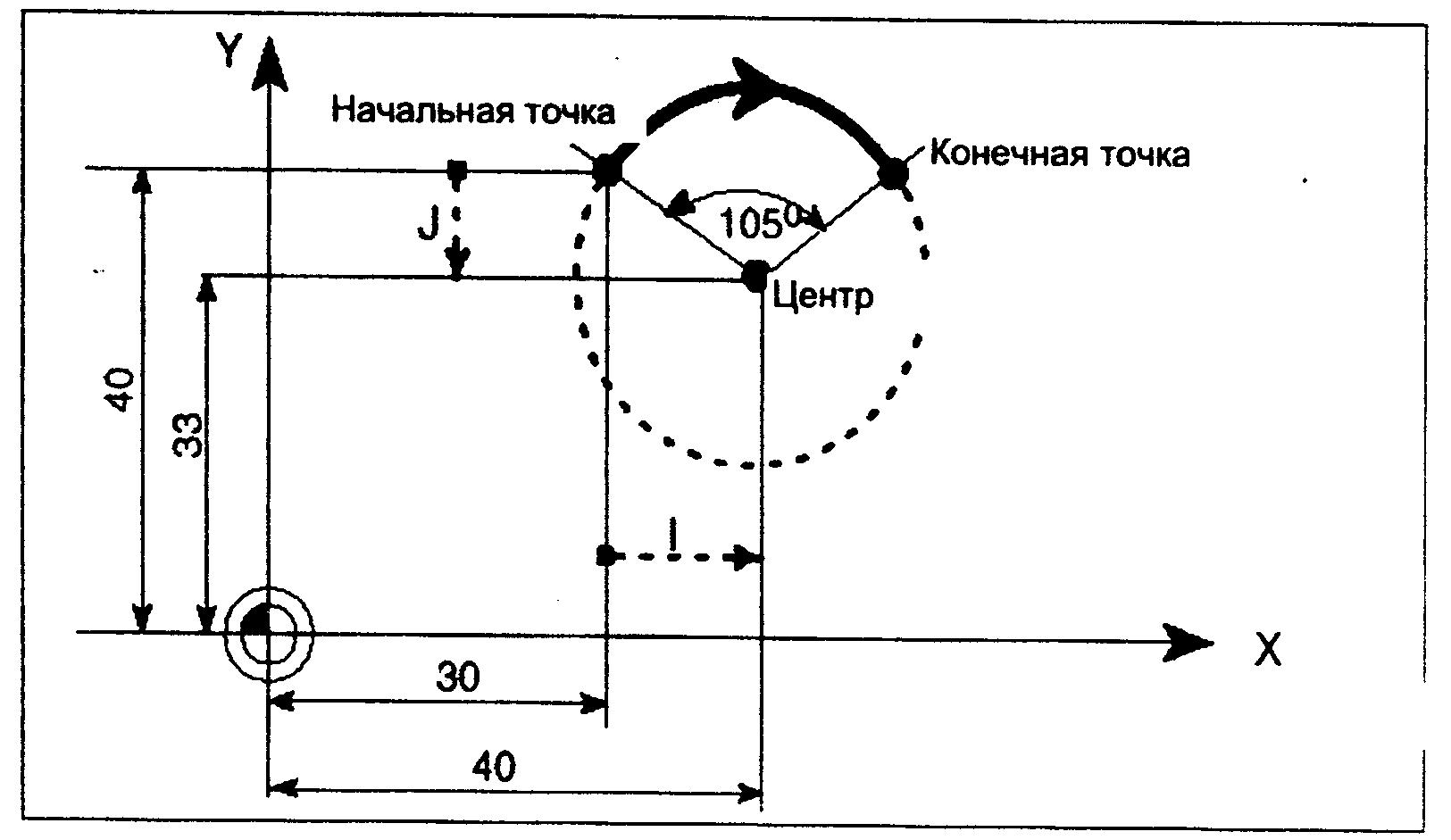
Рис. 2.2.1
N5 G90 Х30 Y40
N10 G2 Х50 Y40 I10 J-7 |
;Начальная точка окружности для N10
;Конечная точка и центр окружности |
2.2.9.2. Для задания круговой интерполяции через радиус окружности и конечную опорную точку траектории (рис. 2.2.2)в управляющей программе необходимо задать:
скорость подачи режущего инструмента;
признак круговой интерполяции:
G2 круговая интерполяция, движение режущего инструмента по часовой стрелке;
G3 круговая интерполяция, движение режущего инструмента против часовой стрелки.
геометрическую информацию в мм:
при абсолютной системе G90 координаты конечной опорной точки дуги относительно центра системы координат детали (или станка); знак при геометрической информации определяется номером квадранта;
при относительной системе G91 координаты конечной опорной точки дуги относительно начальной опорной точки дуги; знак при геометрической информации определяется направлением движения вдоль осей;
значение величины радиуса с адресом CR=; знак перед адресом минус CR = означает, что выбирается сегмент окружности больший, чем половина окружности.
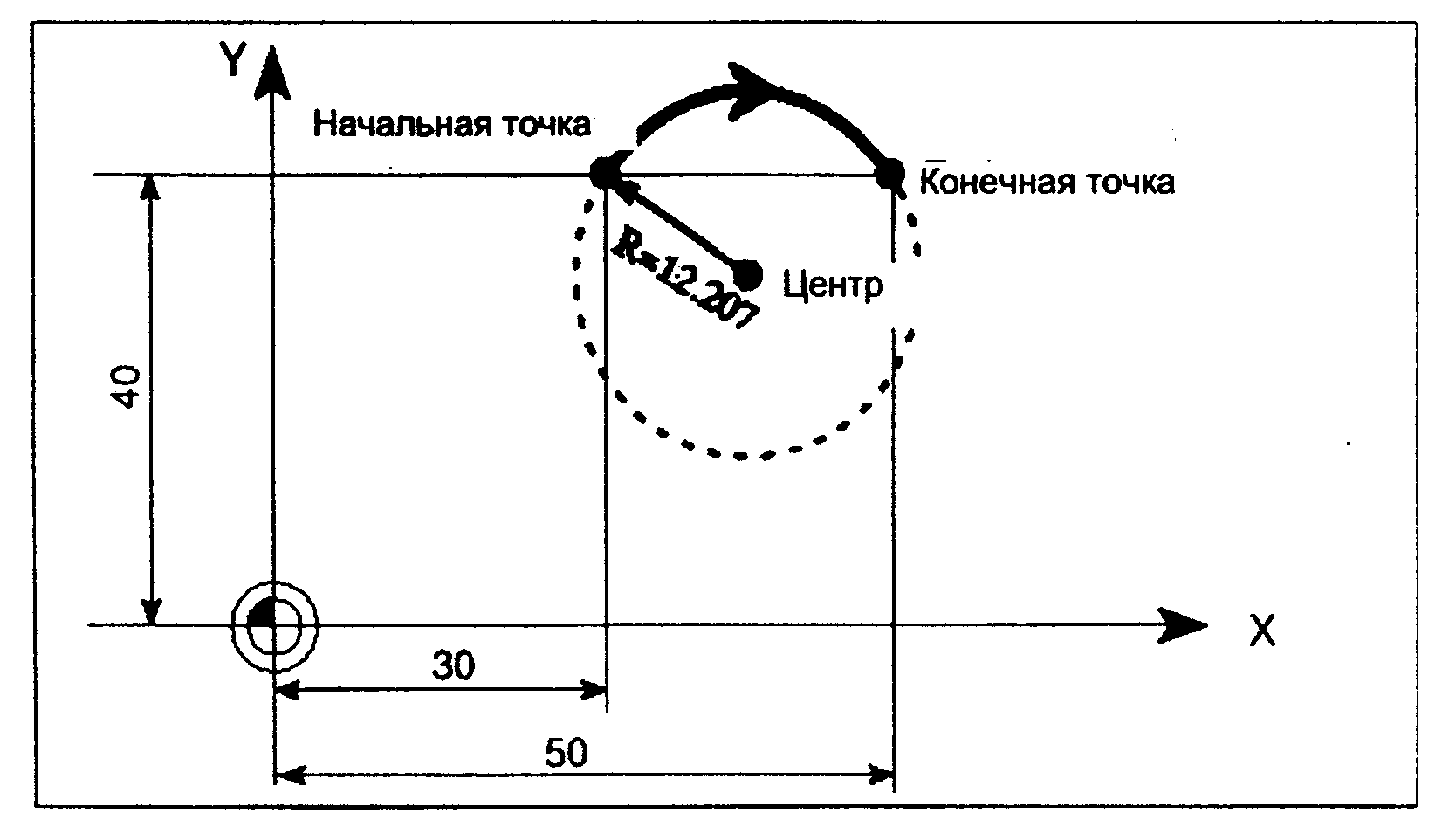
Рис. 2.2.2
N5 G90 Х30 Y40
N10 G2 Х50 Y40 CR=12.207 |
; Начальная точка окружности для N 10
; Конечная точка и радиус |
2.2.9.3. Для задания круговой интерполяции через угол и конечную опорную точку траектории (рис. 2.2.3) в управляющей программе необходимо задать:
скорость подачи режущего инструмента;
признак круговой интерполяции:
G2 круговая интерполяция, движение режущего инструмента по часовой стрелке;
G3 круговая интерполяция, движение режущего инструмента против часовой стрелки.
геометрическую информацию в мм:
при абсолютной системе G90 координаты конечной опорной точки дуги относительно центра системы координат детали (или станка); знак при геометрической информации определяется номером квадранта;
при относительной системе G91 координаты конечной опорной точки дуги относительно начальной опорной точки дуги; знак при геометрической информации определяется направлением движения вдоль осей;
значение величины угла с адресом AR=.
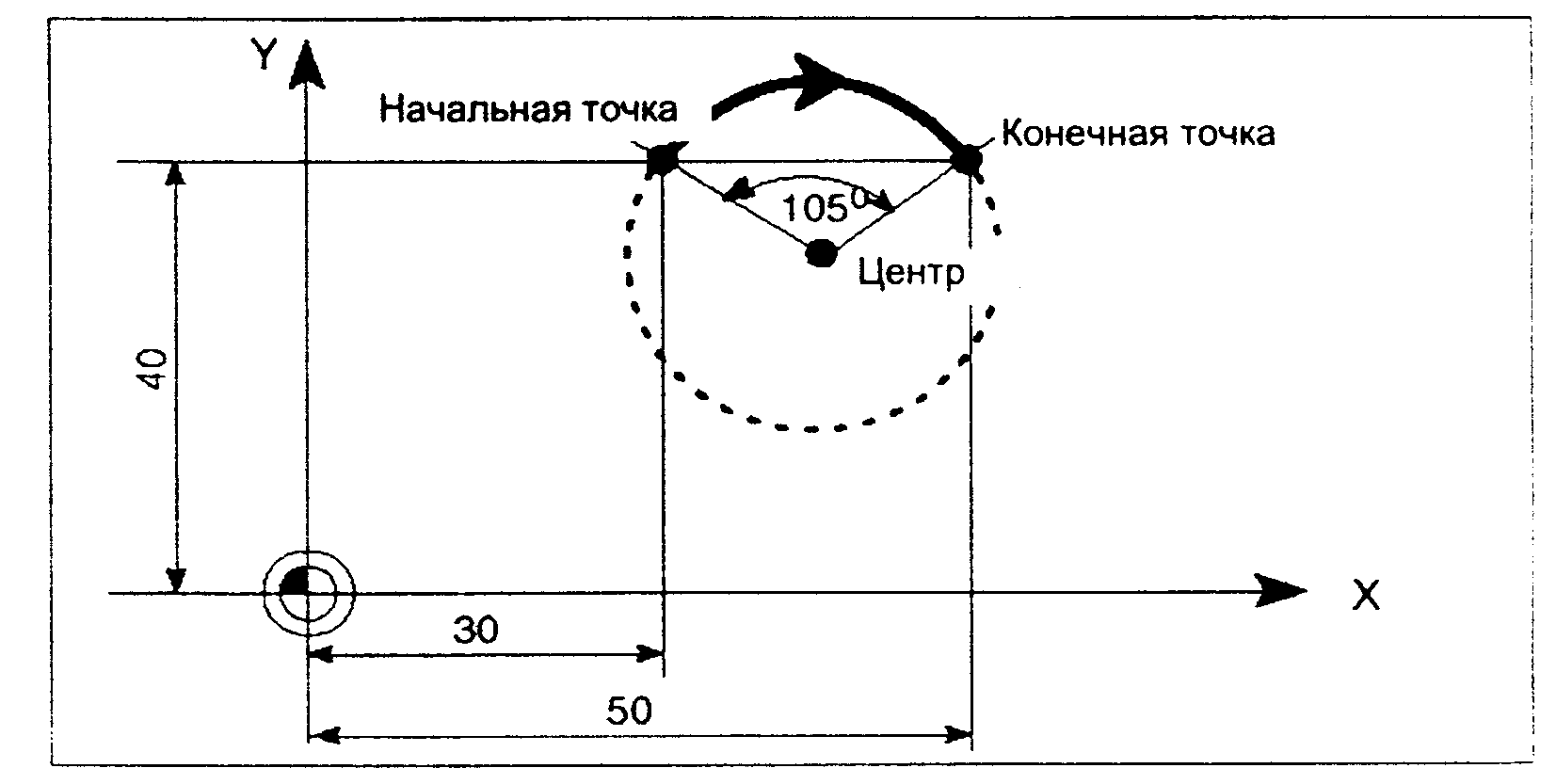
Рис. 2.2.3
N5 G90 Х30 Y40
N10 G2 Х50 Y40 AR=105 |
; Начальная точка окружности для N10
; Конечная точка и угол |
2.2.9.4. Для задания круговой интерполяции через центр окружности и угол (рис. 2.2.4) в управляющей программе необходимо задать:
скорость подачи режущего инструмента;
признак круговой интерполяции:
G2 круговая интерполяция, движение режущего инструмента по часовой стрелке;
G3 круговая интерполяция, движение режущего инструмента против часовой стрелки.
геометрическую информацию в мм:
проекции векторов на оси системы координат; вектора должны соединять начальную опорную точку траектории с центром дуги окружности; знак при проекции определяется направлением вектора вдоль оси; адреса проекций векторов: по оси x I, по оси y J, по оси z K.
значение величины угла с адресом AR=.
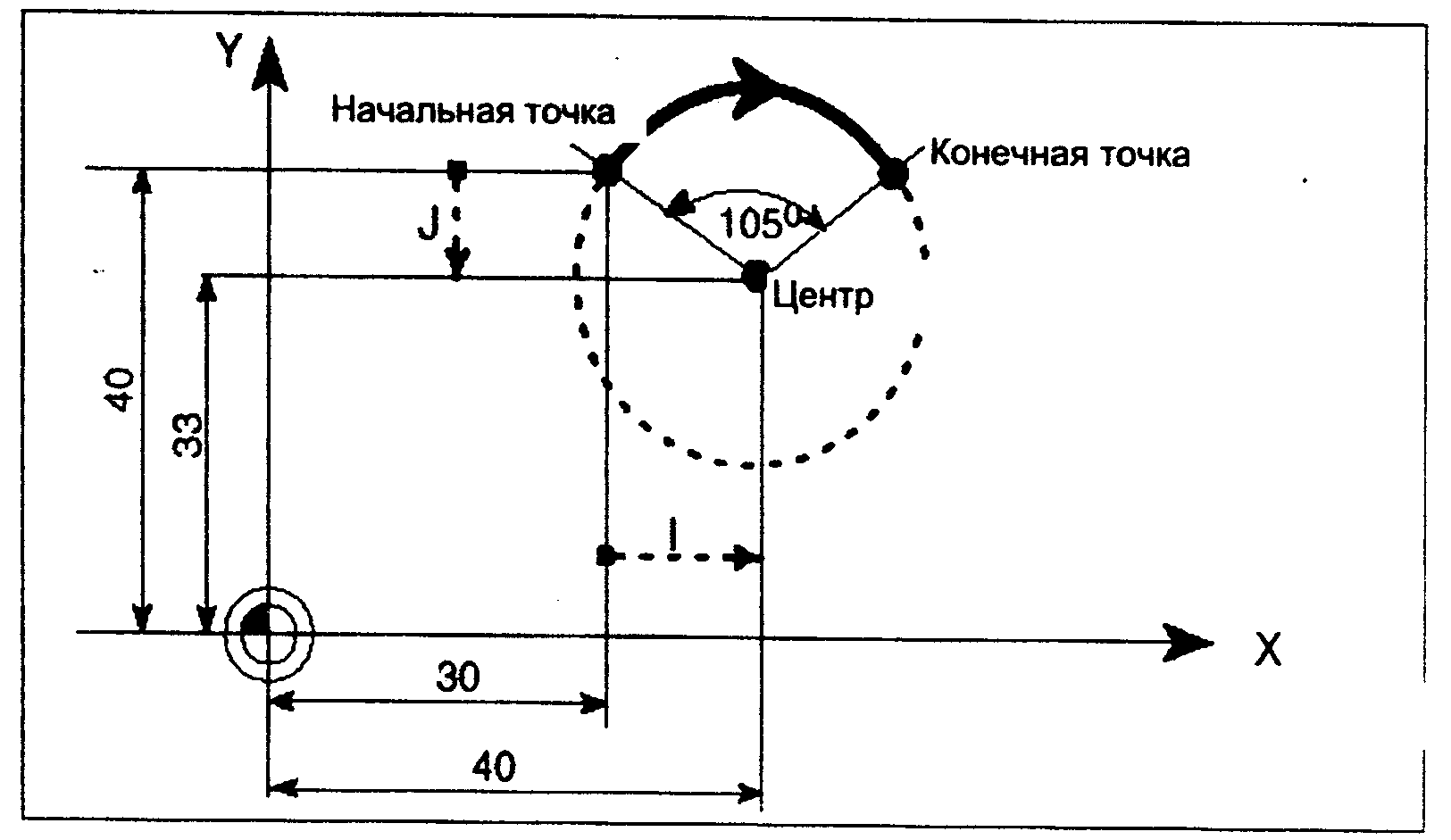
Рис. 2.2.4
N5 G90 Х30 У40
N10 G2 I10 J-7 AR=105 |
; Начальная точка окружности для N10
; Центр окружности и угол |