

3.7 Контрольні питання
Якого виду граничні умови використовуються в задачах параболічного типу?
Які види шаблонів використовуються в методі сіток у задачах параболічного типу? Яким чином будують на цих сітках різницеві апроксимації?
Опишіть метод прогону і його роль у розв'язку задач із ДРЧП.
З яких міркувань вибирають крок сітки в методі сіток?
У яких випадках може виникати нестійкість розв'язку задачі? Як впливає вибір параметрів сітки на стійкість?
Що розуміють під збіжністю процесу розв'язку задачі?
Що таке різницеві схеми підвищеної точності і які шаблони при цьому використовуються?
Як можна одержати апостеріорні оцінки погрішності отриманого розв'язку та уточнити розв'язок?
4 Метод сіток розв'язку крайових задач для хвильових рівнянь
4.1 Постановка задачі
Р озглянемо
задачу поздовжніх
коливань тонкого однорідного стрижня
довжиною
озглянемо
задачу поздовжніх
коливань тонкого однорідного стрижня
довжиною
![]() ,
коли його деформація
залежить тільки від поздовжньої
( уздовж осі стрижня) координати
й часу
(рис. 6.1).
,
коли його деформація
залежить тільки від поздовжньої
( уздовж осі стрижня) координати
й часу
(рис. 6.1).
Рисунок 4.1 - Модель стрижня
Коливання стрижня описуються диференціальним рівнянням:
![]() ,
(4.1)
,
(4.1)
де
![]() ,
,
![]() і
і
![]() – модуль пружності й щільності матеріалу
стрижня
– модуль пружності й щільності матеріалу
стрижня
с початковими умовами:
,
![]()
і граничними умовами:
![]() ,
,
![]() .
.
Для
розв'язку задачі методом кінцевих
різниць побудуємо прямокутну сітку
(мал. 6.2), вузли якої визначаються
формулами:
,
![]() ,
,
,
,
![]() .
.
Значення на лівій, правій і нижній сторонах сітки відомі з початкових і граничних умов.
Р исунок
4.2 - Просторово-часова сітка й шаблон,
що використовуються для рішення рівнянь
гіперболічного типу
исунок
4.2 - Просторово-часова сітка й шаблон,
що використовуються для рішення рівнянь
гіперболічного типу
Явна схема
Замінимо частинні похідні в рівнянні (4.1) їх кінцево-різницевими апроксимаціями й підставимо їх у рівняння коливання. Одержимо:
![]()
Тут використовується п’яти точковий шаблон, представлений на рис. 4.2.
Отримане
рівняння дозволяє виразити значення
функції
в момент часу
![]() через значення функції в попередні
моменти часу:
через значення функції в попередні
моменти часу:
![]() .
.
Позначимо
![]()
![]() ,
приведемо подібні в останьому рівнянні
і отримаємо розрахункову формулу для
явної схеми:
,
приведемо подібні в останьому рівнянні
і отримаємо розрахункову формулу для
явної схеми:
![]() (4.2)
(4.2)
У
якості граничних умов по
можуть використовуватися будь-які
умови, що описують спосіб закріплення
стрижня. Наприклад, тверде закріплення
припускає нульове зрушення на кінцях
стрижня. Це відповідає умові
,
![]() .
За часом
у якості початкових умов задамо при
вхідну деформацію стрижня й початкову
швидкість його коливань
,
.
.
За часом
у якості початкових умов задамо при
вхідну деформацію стрижня й початкову
швидкість його коливань
,
.
Алгоритм обчислень за явною схемою реалізується наступною послідовністю дій.
Визначимо деформацію стрижня в моменти й
 .
Для
деформація відома з початкових умов
.
Для наступного моменту часу
деформацію визначимо за допомогою
другої початкової умови, що задає
швидкість
.
Для
деформація відома з початкових умов
.
Для наступного моменту часу
деформацію визначимо за допомогою
другої початкової умови, що задає
швидкість
 при
:
при
:
,
тоді
![]() ,
отже
,
отже
![]() (4.3)
(4.3)
Погрішність
формули (4.3)
![]() .
.
Для одержання розв'язку при
 використовуємо формулу (4.2).
використовуємо формулу (4.2).
Схема
(4.2)-(4.3) дає порядок апроксимації
![]() .
Але порядок апроксимаціїї можна
збільшити. Для цього введемо фіктивний
часовий шар з вузлами
.
Але порядок апроксимаціїї можна
збільшити. Для цього введемо фіктивний
часовий шар з вузлами
![]() ,
що лежатиме за межами області сітки.
Значення сіткової функції на цьому шарі
позначимо
,
що лежатиме за межами області сітки.
Значення сіткової функції на цьому шарі
позначимо
![]() ,
,
![]() .
Для апроксимації похідної за часом у
вузлах першого часового шару використаємо
центральну симетричну різницю:
.
Для апроксимації похідної за часом у
вузлах першого часового шару використаємо
центральну симетричну різницю:
![]()
Відповідне різницеве рівняння запишется таким чином:
![]() .
.
Звідки
![]() .
Щоб виключити значення функції у
фіктивному вузлі
,
використаємо різницеве рівняння (4.2),
записавши його на нульовому шарі для
.
Щоб виключити значення функції у
фіктивному вузлі
,
використаємо різницеве рівняння (4.2),
записавши його на нульовому шарі для
![]() :
:
![]()
Виключаємо з останього рівняння і використовуємо початкову умову, тоді отримуємо явну формулу для обчислення наближеного розв'язку на другому часовому шарі:
![]() (4.4)
(4.4)
Різницева схема (6.2), (6.4) апроксимує диференціальну задачу з порядком .
Явна
схема умовно стійка.
Це означає, що при розв'язку гіперболічного
рівняння за явною схемою слід обирати
на крок по
залежно від кроку по
.
Теоретично можна показати, що наближений
розв'язок, що одержаний за допомогою
(4.2), сходиться до точного при
![]() й
й
![]() зі швидкістю
зі швидкістю![]() ,
якщо
,
якщо
![]() .
При
.
При
![]() метод стає нестійким. Останнє означає,
що при продовженні обчислень помилки
катастрофічно наростають.
метод стає нестійким. Останнє означає,
що при продовженні обчислень помилки
катастрофічно наростають.
Приклад
4.1. Поздовжні
коливання
![]() тяги описуються рівнянням
тяги описуються рівнянням
![]() ,***
,***
де
– модуль пружності,
– щільність матеріалу стрижня. Тяга
має довжину
![]() й закріплена на кінцях. Захопивши тягу
в центрі, її деформують так, що поздовжнє
переміщення стає рівним
й закріплена на кінцях. Захопивши тягу
в центрі, її деформують так, що поздовжнє
переміщення стає рівним
![]() :
:
![]() .
.
Потім
тяга звільняється. Розрахуйте коливання
![]() при заданих параметрах. ***
при заданих параметрах. ***
-
, см
10
, Н/м2
103
, см
1
, кг/м2
103
Р исунок
4.3 – Модель стрижня прикладу 4.1
исунок
4.3 – Модель стрижня прикладу 4.1
Розв'язок. Побудуємо сітку, як показано на рис. 4.4.
Різницеве рівняння коливання струни
![]()
(з
урахуванням кроків по
й по
відповідно:
![]() ,
,
![]() )
після перетворень прийме вигляд:
)
після перетворень прийме вигляд:
![]() .
.
Схема
стійка, якщо
![]() .
Перевіримо цю нерівність при заданих
умовах задачі:
.
Перевіримо цю нерівність при заданих
умовах задачі:
![]() ,
тобто схема є стійкою.
,
тобто схема є стійкою.
Із граничних умов одержимо:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Тому що тяга закріплена на кінцях, маємо
![]() ,
,
![]() ;
;
![]() ,
,
![]() ;
;
![]() ,
,
![]() .
.
Рисунок 4.4 – Просторово-тимчасова сітка прикладу 4.1.
Так
як
![]() ,
тоді
,
тоді
![]() ,
отже
,
отже
![]() .
Тобто для
.
Тобто для
![]() :
:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Підрахуємо
значення для
![]() :
:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Аналогічно обчислюємо для інших значень .
Графік
розв'язку, отриманий із кроком
і із кроком за часом
![]() ,
наведений на рис. 4.5. Початкове положення
стрижня показане на графіку точками,
інші графіки відповідають моментам
часу 1, 2, 3 і 4.
,
наведений на рис. 4.5. Початкове положення
стрижня показане на графіку точками,
інші графіки відповідають моментам
часу 1, 2, 3 і 4.
Погрішність
розв'язку, як видно з порівняння графіків
з наведеними розрахунками для
,
трохи менше 0.2, що становить майже
половину абсолютного значення розв'язку.
Це говорить про необхідність зменшення
кроку по координаті й за часом відповідно.
Розрахунки із кроком
![]() наведені на рис. 4.6 і показують, що
погрішність розв'язку, оцінена за
правилом Рунге, не перевищує абсолютного
значення 0.05. (5% відносна погрішність).
наведені на рис. 4.6 і показують, що
погрішність розв'язку, оцінена за
правилом Рунге, не перевищує абсолютного
значення 0.05. (5% відносна погрішність).
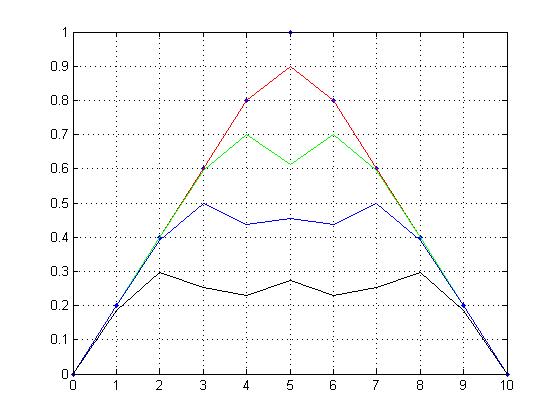
Рисунок 4.5 – Розв'язок задачі 4.1 із кроком

Рисунок 4.6 – Розв'язок задачі 4.1 із кроком