

Программируемый интервальный таймер
Программируемый интервальный таймер (ПИТ) — ИМС, предназначенная для организации ввода/вывода числоимпульсной информации и формирования временных интервалов между импульсами.
Пример схемы подключения ИМС ПИТ к шинам МПС приведен на рис.2.24.
ИМС таймера содержит:
три независимых канала OUT0, OUТ1 и OUТ2, каждый из которых представляет собой 16-разрядный вычитающий счётчик;
буфер данных, предназначенный для обмена данными и управляющими словами между ЦП и ПИТ по ШД.
схему управления чтения/записью, обеспечивающую операции ввода/вывода информации ПИТ.
регистр управляющего слова.
Рис. 2.24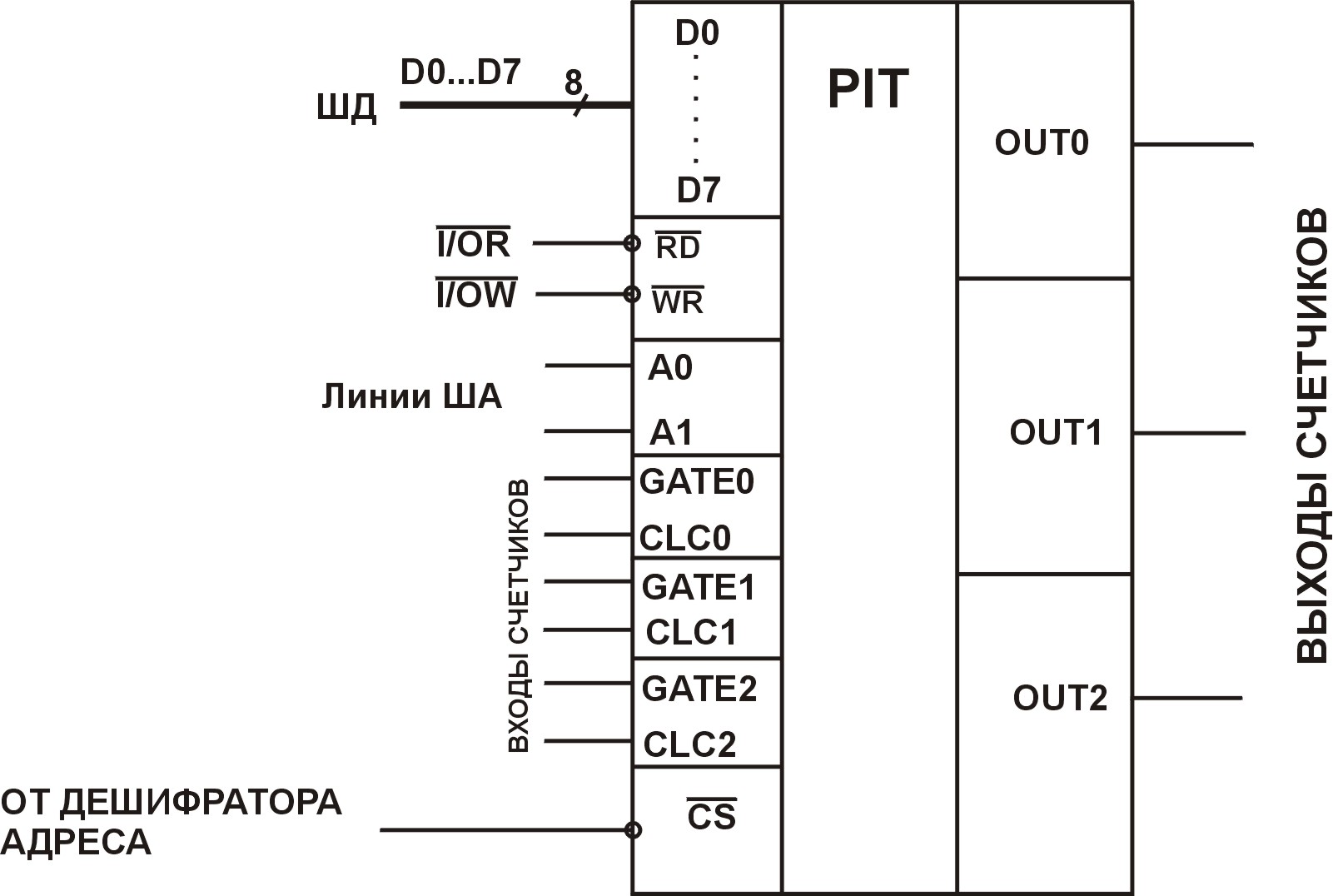
Таблица 2.6
Вывод ИМС |
Назначение |
D0 — D7 |
Канал данных |
, |
Сигналы чтения и записи |
А0, А1 |
Входы адресации портов ПИТ и регистра управляющего слова |
CLC0 — CLC2 |
Входы синхронизации счетчиков |
GATE0 — GATE2 |
Входы управления счетчиков |
OUT0 — OUT2 |
Выходы счетчиков |
|
Выборка ИМС |
Вывод ИМС |
Назначение |
D0 — D7 |
Канал данных |
, |
Сигналы чтения и записи |
А0, А1 |
Входы адресации портов ПИТ и регистра управляющего слова |
CLC0 — CLC2 |
Входы синхронизации счетчиков |
GATE0 — GATE2 |
Входы управления счетчиков |
OUT0 — OUT2 |
Выходы счетчиков |
|
Выборка ИМС |
Программирование режима работы ПИТ осуществляется путём записи определенного кода в регистр управляющего слова также, как и в ППИ (см. п. 2.5.2). Адресация счетчиков ПИТ и регистра управляющего слова осуществляется по линиям А0 и А1 (см. таблицу 2.7).
Таблица 2.7
Устройства ПИТ |
Адресные линии |
|
|
А1 |
А0 |
Канал OUT0 Канал OUТ1 Канал OUТ2 Регистр управляющего слова |
0 0 1 1 |
0 1 0 1 |
ПИТ может применяться как программируемый делитель тактовой частоты микропроцессора, а также как мультивибратор, счетчик событий и т.д.
Программируемый контроллер приоритетных прерываний
Прерывание — переход микропроцессора по внешнему сигналу от выполнения текущей программы к выполнению подпрограммы (обработчик прерываний), записанной в памяти (обычно ПЗУ) по определенному адресу, который называют вектором.
Прерывание микропроцессора осуществляет ИМС, называемая программируемым контроллером приоритетных прерываний (ПКП). Этот контроллер реализует следующие функции:
принимает сигналы, называемые запросами прерываний;
вырабатывает сигнал прерывания микропроцессора;
формирует для микропроцессора команду перехода к подпрограмме обработки запроса (обработчика прерываний).
Подключение ПКП к системным шинам приведено на рис. 2.25. ИМС ПКП содержит:
двунаправленный буфер данных, сопрягающий ПКП с шиной данных;
блок управления чтением/записью, принимающий от микропроцессора управляющие сигналы и задающий режим функционирования ПКП;
схему управления, вырабатывающую сигнал прерывания IRQ и формирующую команду вызова подпрограммы обслуживания прерывания (CALL <адрес подпрограммы обработки прерывания>);
регистр запроса прерываний;
схему принятия решений по приоритетам прерываний, идентифицирующую приоритеты запросов и выбирающую запрос с наивысшим приоритетом.
Назначение
выводов ИМС
![]() ПКП
приведено в таблице 2.8
ПКП
приведено в таблице 2.8
В составе МПС ПКП решает следующие задачи:
определение запроса прерывания на обслуживание ВУ с наивысшим приоритетом;
Таблица 2.8
Вывод ИМС
Назначение
D0...D7
Линии передачи данных
,
Входы управления чтением и записью
А0
Адресный вход
Подтверждение прерывания
INT
Сигнал прерывания микропроцессора
IR0 — IR7
Входы запросов прерываний от ВУ
Вход выборки ИМС
передача управления микропроцессору, реализующему обслуживание запроса путем выполнения подпрограммы обработки прерывания, соответствующей поступившему запросу.
Названная подпрограмма может находиться в ПЗУ или в ОЗУ. Подпрограммы обработки прерываний, хранящиеся в ОЗУ, обычно называют резидентными.
ПКП позволяет реализовать процесс прерывания двумя способами:
по запросу от ВУ.
по опросу запросов на обслуживание ВУ.
Временная диаграмма, отображающая взаимодействие ПКП с микропроцессором при обслуживании прерывания по запросу от ВУ приведена на рис. 2.26. Согласно диаграмме в процессе обслуживания выполняются следующие действия:
запросы прерываний поступают на входы ПКП IR0...IR7 (см. рис. 2.25);
Рис.
2.26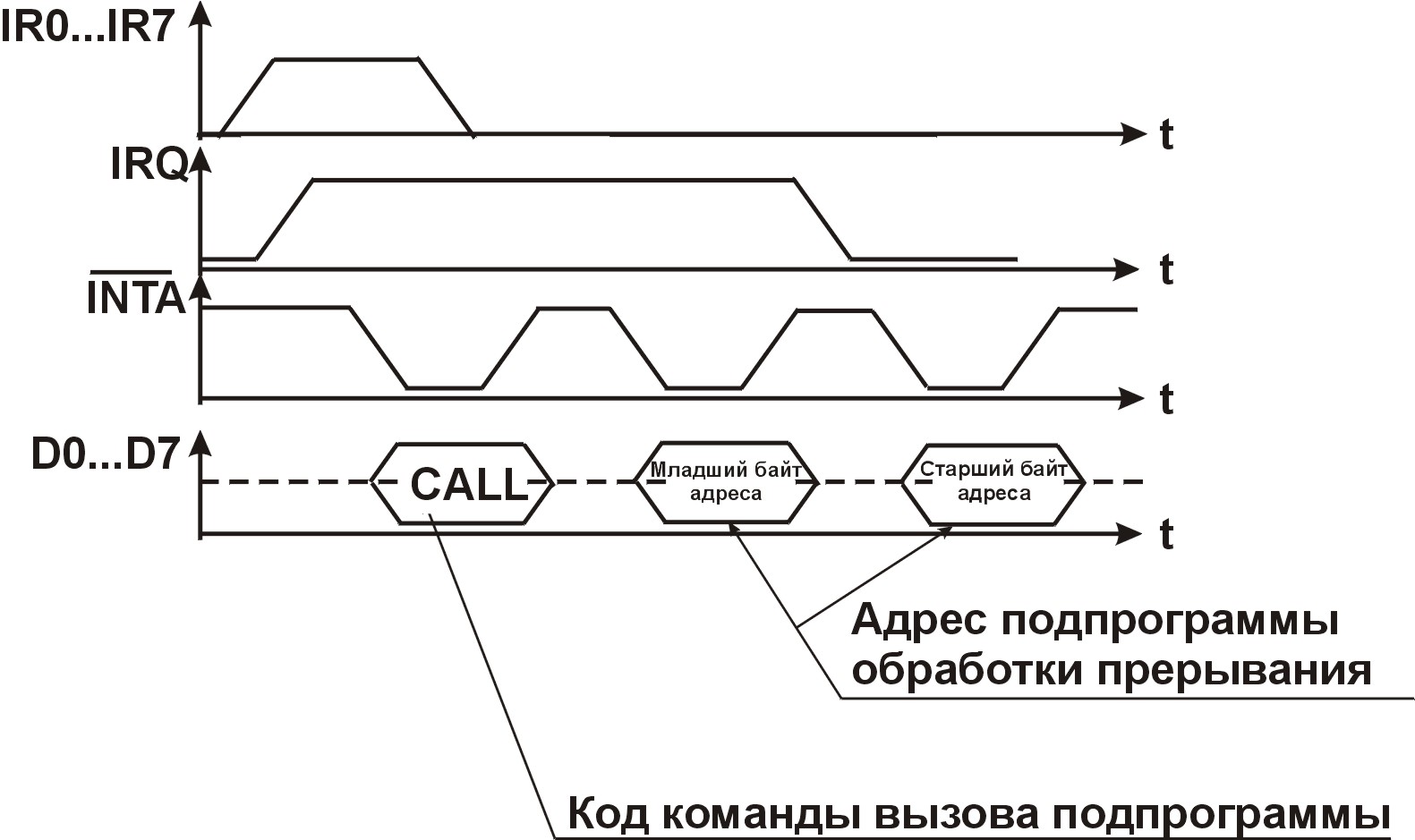
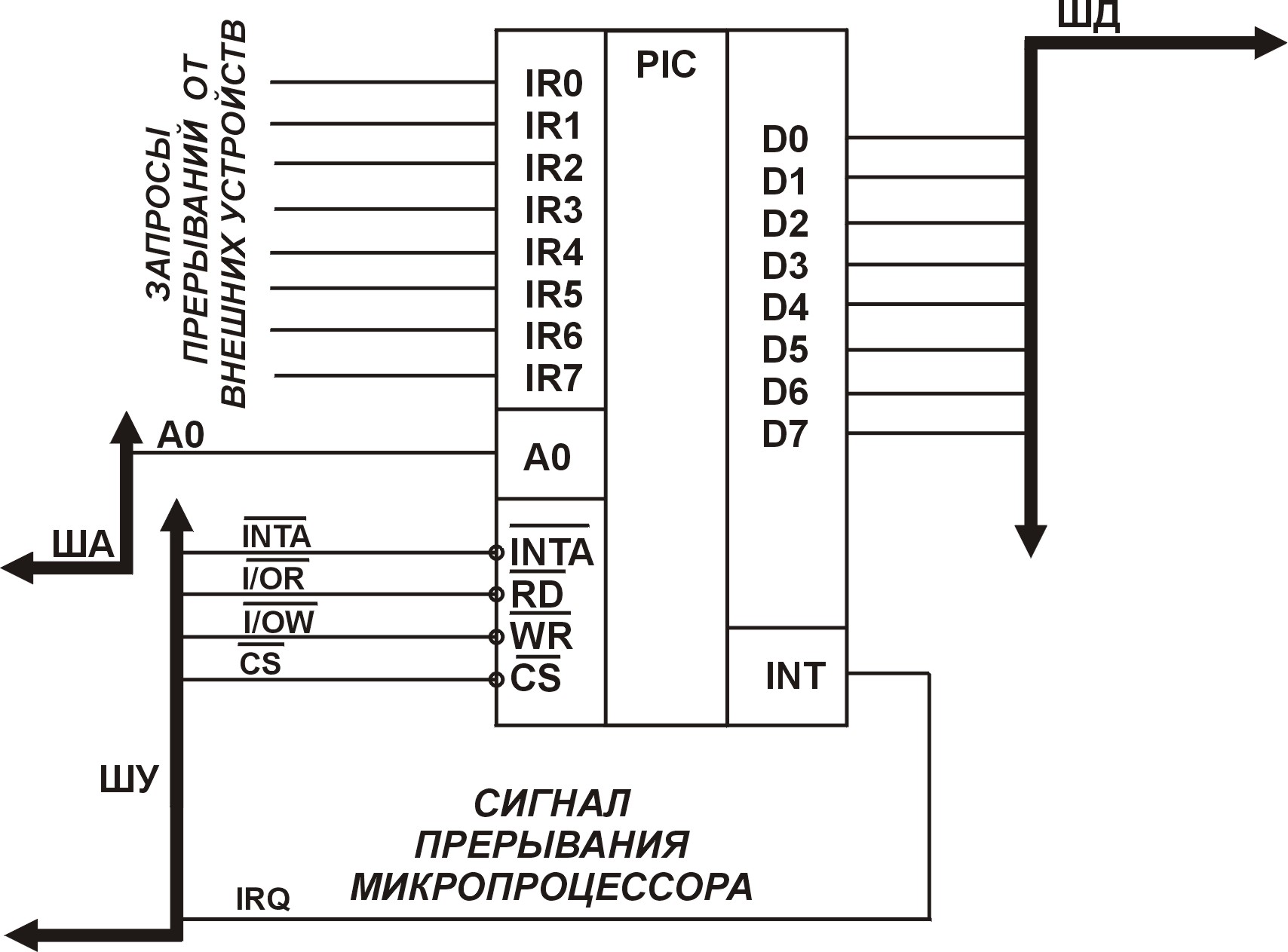
Рис.2.25
ПКП вырабатывает сигнал IRQ, который принимает микропроцессор (см. рис. 2.25 и рис.2.1);прием микропроцессором IRQ подтверждается импульсным сигналом
 ,
вырабатываемый СКФ (см. п. 2.1);
,
вырабатываемый СКФ (см. п. 2.1);после приема первого импульса ПКП формирует на шине данных код операции команды CALL;
микропроцессор по ШД принимает код операции CALL и выдает еще 2 импульса сигнала INTA, по которым ПКП передает два байта вектора прерывания, причем сначала передается младший байт адреса, а затем старший.
При
обслуживании прерывания по опросу
микропроцессор программируется таким
образом, что периодически обращается
к ПКП (опрашивает) и производит считывание
по сигналу
![]() кода номера запроса с наивысшим
приоритетом. При этом ПКП осуществляет
прием запросов от ВУ также, как и при
обслуживании по запросу.
кода номера запроса с наивысшим
приоритетом. При этом ПКП осуществляет
прием запросов от ВУ также, как и при
обслуживании по запросу.