

Протоколы обмена
Протокол обмена может быть:
синхронным (тактируемым);
асинхронным (нетактируемым);
полусинхронным.
Синхронный обмен данными происходит в интервал времени, в течение которого действует импульс синхронизации, формируемый источником. Примером такого обмена является запись кода в параллельный или сдвиговый регистр (см. п. 1.2.1, 1.2.2).
Асинхронный обмен предполагает управление передачей данных сигналами источника и приемника. При таком обмене источник данных посылает приемнику сигнал запроса передачи REQUEST (запрос), в ответ на который приемник выдает сигнал ACKNOLEDGE (подтверждение), подтверждающий готовность принять данные.
Полусинхронный обмен. Для организации такого обмена применяются два основных сигнала:
CLOCK — синхронизация;
WAIT — ожидание.
Сигнал CLOCK, как и при синхронном обмене, формирует источник, а WAIT — приемник. Если приемник обладает быстродействием, достаточным для приема данных за один такт синхронизации, работа названного протокола аналогична синхронному. Если же приемник не успевает принимать данные в течение одного такта, то он сообщает об этом источнику активным сигналом WAIT. При получении этого сигнала источник продолжает выдавать такты синхронизации и прежние данные, которые не были приняты. Когда WAIT становится пассивен, источник выдаст новую информацию.
Кроме рассмотренных протоколов обмена для шины, соединяющей два устройства, различают три режима работы:
дуплексный;
полудуплексный;
симплексный.
Дуплексный режим означает одновременную трансляцию данных в обоих направлениях по разным каналам шины. В полудуплексном режиме передача осуществляется в противоположных направлениях поочередно, при этом должны быть предусмотрены средства переключения направления обмена данными. Симплексный режим означает одностороннюю передачу данных, во встречном направлении передаются только сигналы управления.
1.3 Особенности применения цифровых микросхем
В цифровых ИМС различают:
информационные входы;
входы управления;
выходы.
На входе обязательно должен быть установлен логический сигнал Н- или L-уровня, поскольку свободный (ни к чему не подключенный) вход чувствителен к помехам. Таким образом, ИМС со свободным входом может работать некорректно. Также не рекомендуется соединять накоротко свободные входы ИМС разных типов — в этом случае состояние входов может быть неопределенным.
ИМС различаются типами выходов, которые могут быть:
обычными;
с открытым коллектором (ОК-выход);
тристабильными.
Рассмотрим для примера ТТЛ-инверторы, аппаратно реализующие логическую функцию НЕ на основе транзисторного ключа в схеме с общим эмиттером, имеющие перечисленные выходы. Схемы инверторов с обычным и ОК-выходом приведены на рис. 1.7 а), б) соответственно. Напряжения Н- и L-уровня на этих выходах формируются транзисторным ключом путем коммутации выходной линии Y либо с источником Ucc, либо с заземлением, в зависимости от значения входного сигнала Х. Если ИМС с ОК-выходом применить как ИМС с обычным выходом (не подключить через резистор напряжение электропитания Ucc к коллектору транзистора), то ОК-выход не сможет выдать сигнал Н-уровня, поскольку транзистор-
Рис. 1.5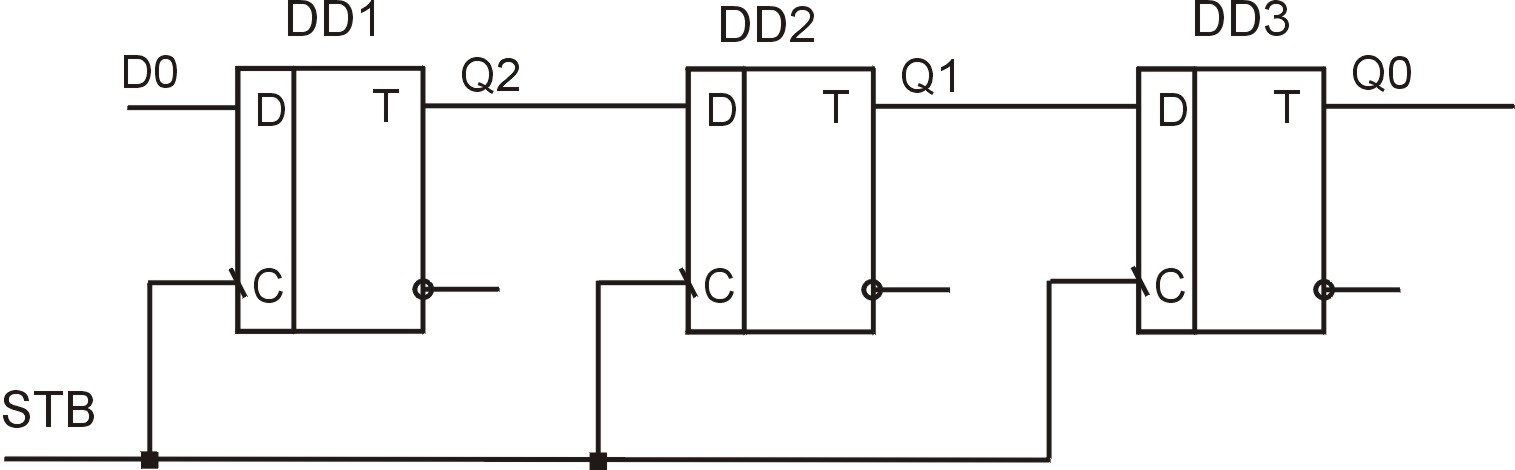
Рис.
1.6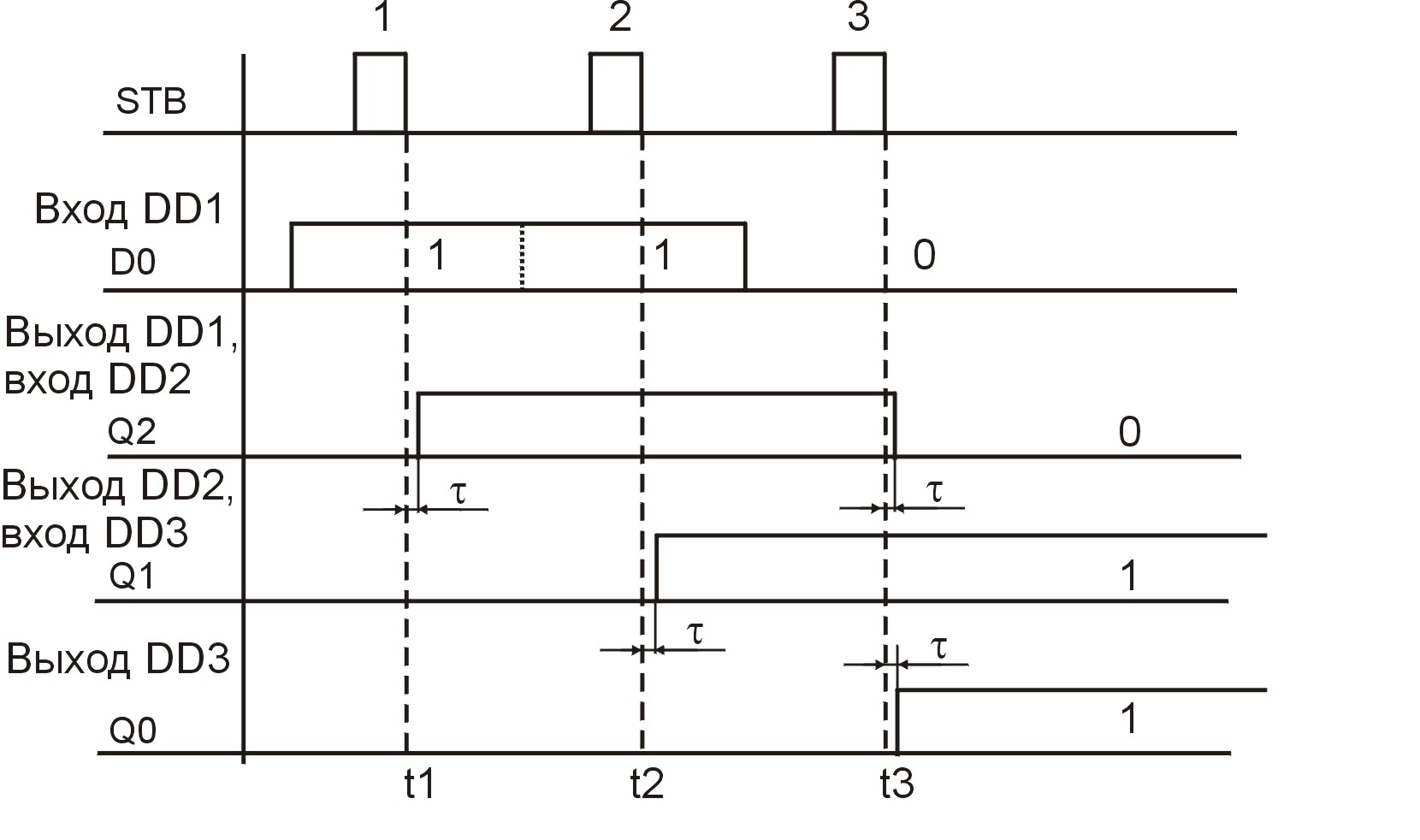
Рис.
1.7
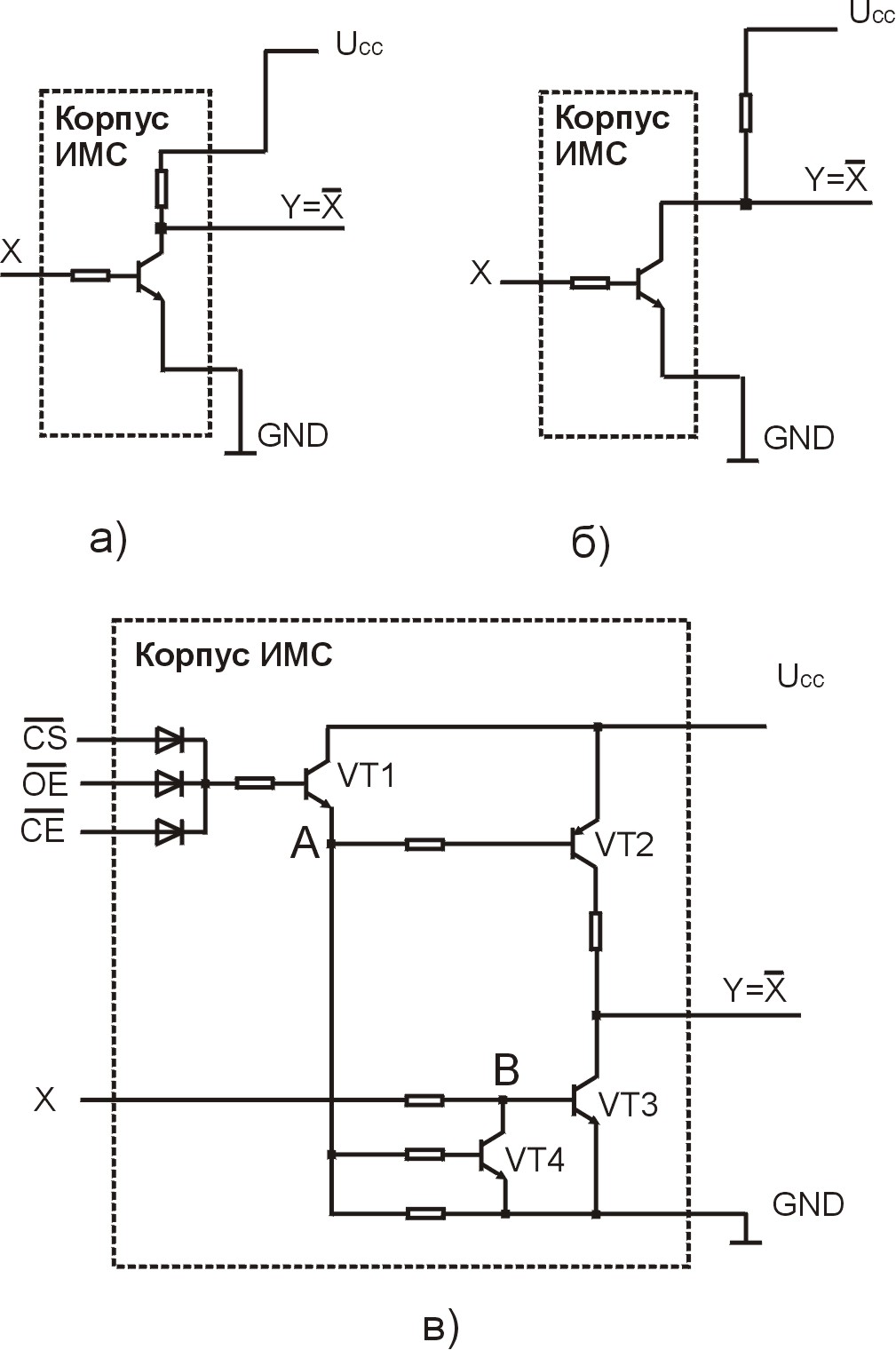
ный ключ будет коммутировать выходную линию только с заземлением GND.
Инвертор, схема которого приведена на рис. 1.7 в) кроме информационного входа X имеет также входы управления:
 (Chip
Select) —
выбор микросхемы;
(Chip
Select) —
выбор микросхемы;
 (Chip
Enable) —
разрешение микросхемы;
(Chip
Enable) —
разрешение микросхемы; (Output
Enable) —
разрешение выхода.
(Output
Enable) —
разрешение выхода.
Согласно схеме, если хотя бы один из сигналов , или имеет значение 1, (пассивен) то VT1 включен, в связи с чем в точке А установится потенциал Н-уровня, обеспечивающий включение VT4. В этом случае ключ VT2 будет заперт, а вход Х и база VT3 через включенный транзистор VT4 заземлены в точке В. Это приведет к запиранию ключа VT3 и невозможности управления им по входу Х. Таким образом, запертые транзисторы VT2 и VT3 отключат выходную линию Y как от Ucc, так и от заземления GND. Отключенное состояние выхода называют Z-состоянием.
Если же все сигналы , и установлены в 0, (активны) то произойдет запирание транзистора VT1, что обеспечит постоянное включение VT2 и выключение VT4. Это даст возможность управлять по входу Х коммутацией VT3 также, как и в инверторе с обычным выходом.
Таким образом, данный инвертор может иметь три выходных состояния:
Н-уровень;
L-уровень;
Z-состояние.
В силу этого его выход назван тристабильным, а входы , и — входами разрешения работы ИМС или входами управления Z-состоянием (Z-управляющими входами). Если хотя бы на одном из этих входов установлен пассивный сигнал, то разрешение работы называют предварительным, если же сигналы активны на всех Z-управляющих входах — окончательным. Переключение ИМС из Z-состояния в режим приема или выдачи информации произойдет только при окончательном разрешении. У некоторых устройств тристабильными могут быть как выходы, так и информационные входы.
Несколько источников данных с тристабильными выходами можно подключить к одной информационной линии приемника. С помощью сигналов , и приемник определит нужный ему источник информации и запретит работу других, установив их выходы в Z-состояние. Этим исключается одновременная выдача на одну линию сигналов различных уровней, названная конфликтом.
Очевидно, что подключение обычных и ОК-выходов к одним и тем же линиям создаст конфликтную ситуацию. Для ее исключения применяется ИМС, названная шинным формирователем, условное графическое обозначение которой приведено на рис.1.8. Формирователь имеет:
информационные линии DA0 — DA7, DB0 — DB7(линии DA и DB);
вход управления обменом данными T;
вход разрешения работы .
Рис. 1.8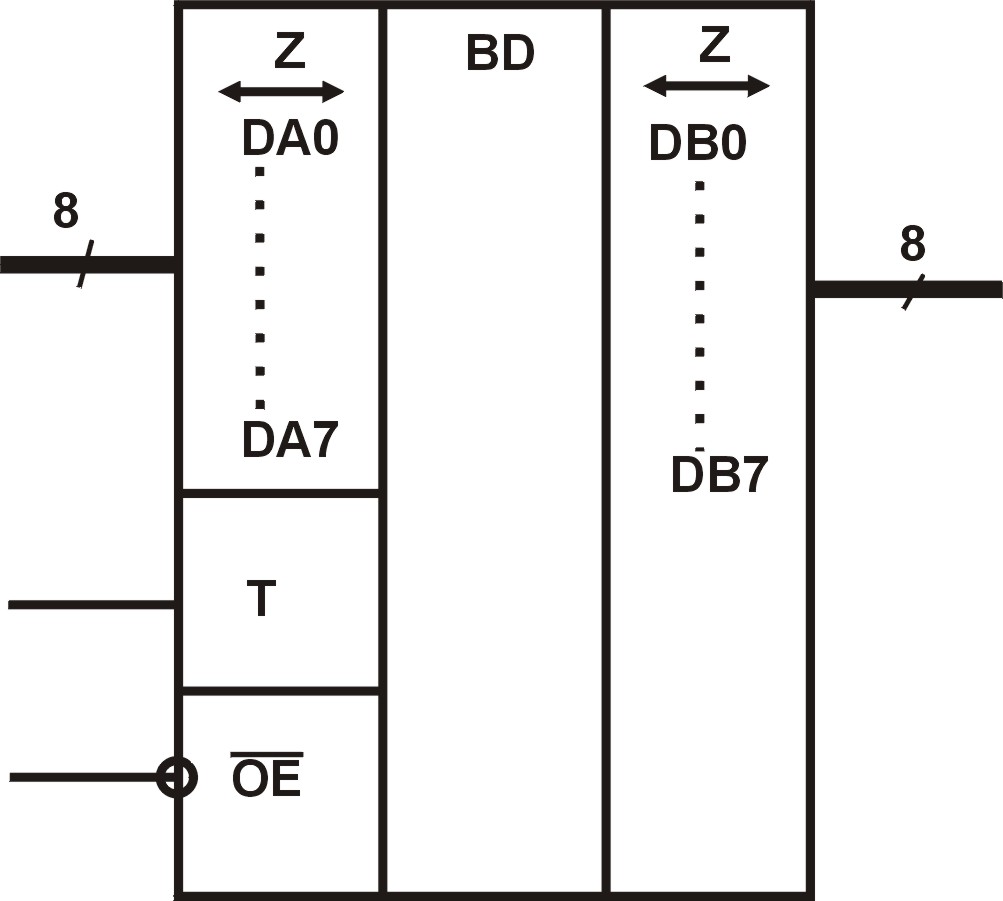
Таблица 1.1.
Входы управления
Направление
обмена данными
T
0
1
DA0…DAm
à
DB0…DBm
0
0
DA0…DAm
ß
DB0…DBm
1
Любое значение
Z-состояние
Одним из примеров применения шинного формирователя является схема устройства (см. рис. 1.9 а)), реализующего подключение параллельного регистра к двунаправленной k+1-разрядной ШД. В данном случае шинный формирователь DD2 применяется как электронный буфер, обеспечивающий запрет на выдачу регистром DD1 информации в интервале времени, когда на ШД присутствуют данные, установленные каким-либо другим устройством. Необходимость запрета состоит в том, что если выдача будет разрешена, то произойдет конфликт между установленными данными, и той информацией, которая ранее была записана в регистр.
а)
б)
Рис.
1.9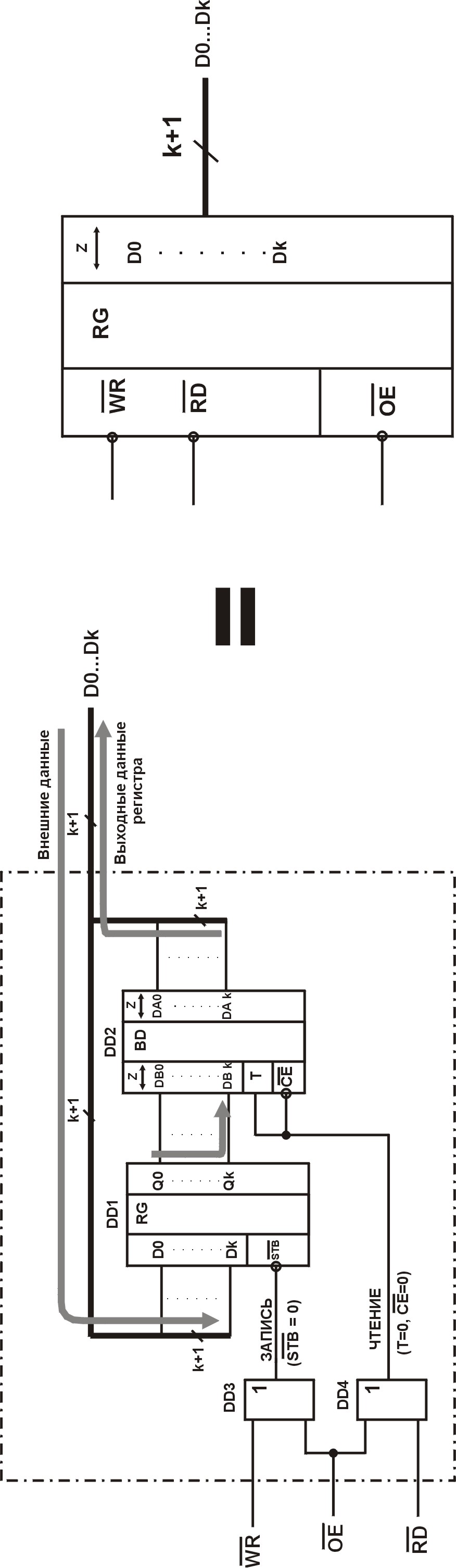
Управление передачей данных осуществляется через логические элементы DD3 и DD4, на входы которых поступают сигналы:
 ,
,
 — управления чтением и записью данных
в регистр;
— управления чтением и записью данных
в регистр; — разрешения
работы выходов регистра с ШД.
— разрешения
работы выходов регистра с ШД.
Соответствие значений этих сигналов режимам функционирования анализируемого устройства, которое может рассматриваться как регистр с двунаправленной ШД (обозначение см. на рис. 1.9 б)), приведено в таблице 1.2.
Таблица 1.2
Режим
Входы
управления
Z-состояние
1
1
0
Выдача данных
(чтение)
0
1
0
Прием данных
(запись)
1
0
0
Запрещенное
состояние входов
0
0
0
Z-состояние
Любые
значения
1
![]()
![]() ,
окончательное переключение из Z-состояния
в режим приема или выдачи данных
происходит по сигналам,
управляющим чтением и записью информации.
Такой подход исключает как выдачу
данных, создающую рассмотренный выше
конфликт, так и их запись в том случае,
если данные, предназначались другому
устройству.
,
окончательное переключение из Z-состояния
в режим приема или выдачи данных
происходит по сигналам,
управляющим чтением и записью информации.
Такой подход исключает как выдачу
данных, создающую рассмотренный выше
конфликт, так и их запись в том случае,
если данные, предназначались другому
устройству.