

22.Принципы построения систем автоматического управления. Управление по отклонению.
Поддержание управляемой величины в определенных пределах или ее изменение по заданному закону может быть осуществлено с помощью систем с замкнутой или разомкнутой цепью воздействия.
П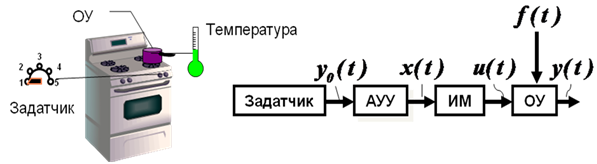 ри
управлении поразомкнутомупринципу на вход автоматического
управляющего устройства (АУУ) подается
сигналy0(t)со специального устройства – задатчика
(З). Определенному значению задающего
воздействияy0(t)будет соответствовать определенное
текущее значение управляемой величиныy(t).
ри
управлении поразомкнутомупринципу на вход автоматического
управляющего устройства (АУУ) подается
сигналy0(t)со специального устройства – задатчика
(З). Определенному значению задающего
воздействияy0(t)будет соответствовать определенное
текущее значение управляемой величиныy(t).
Разомкнутая система автоматического управления (САУ) представляет собой, по существу, передаточную цепь, в которой задающее воздействие y0(t)от задатчика, после надлежащей обработки и усиления, передается на объект управления (ОУ). Обратного воздействия здесь нет. Главное внимание в этих системах уделяется обеспечению определенной последовательности включения и выключения механизмов сигнализации и защите оборудования от аварийных ситуаций. Автоматические устройства с разомкнутой системой управления обычно выполняют одноразовые или циклические операции по жесткой программе без получения информации о ходе процесса и называются автоматами. Примерами могут служить системы управления положением навесных орудий трактора, гидроусилитель рулевого управления, автоматические дозаторы кормов и т.д.
В разомкнутой САУ значение управляемой величины будет сильно зависеть от возмущающих воздействий, влияние которых здесь не учитывается. Ведь разомкнутая система не может самостоятельно, без вмешательства оператора, изменить режим своей работы, если изменилось внешнее возмущение. Так ручной системе управления изменение рельефа обрабатываемой почвы приводит к тому, что глубина обработки не является постоянной.
Рассмотрим следующий класс систем управления, которыми являются замкнутые системы, где объект управления (ОУ) связан с управляющим устройством (АУУ) дополнительной цепью обратной связи, по которой происходит обмен информацией между выходными и входными величинами.
Наибольшее распространение получили САУ построенные на основе принципа управления по отклонению
В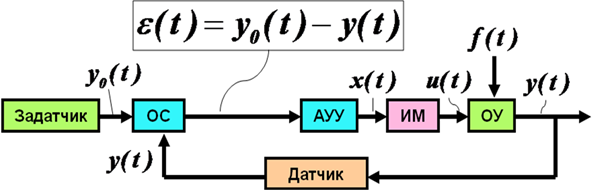 этом случае на выходе системы
устанавливается датчик, который передает
по цепи обратной связи значение
управляемой величиныy(t)на специальное устройство - орган
сравнения (ОС) или сумматор, где оно
сравнивается с задающей величинойy0(t),
и на вход управляющего устройства
поступает разность двух сигналов=
y0(t)
- y(t).
Следовательно, управляющий сигналu(t)формируется под воздействием изменений
самой управляемой величины.
этом случае на выходе системы
устанавливается датчик, который передает
по цепи обратной связи значение
управляемой величиныy(t)на специальное устройство - орган
сравнения (ОС) или сумматор, где оно
сравнивается с задающей величинойy0(t),
и на вход управляющего устройства
поступает разность двух сигналов=
y0(t)
- y(t).
Следовательно, управляющий сигналu(t)формируется под воздействием изменений
самой управляемой величины.
Е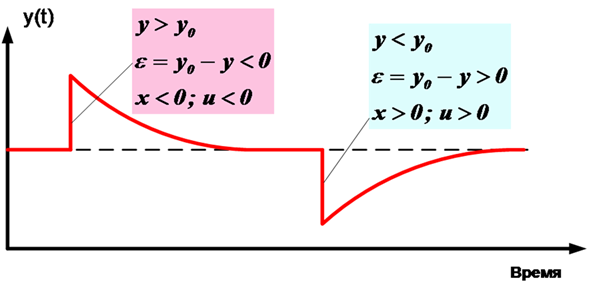 сли
управляемая величина уменьшится (рис
1.11), то уменьшитсяy(t)и, соответственно, появиться положительный
сигнал отклонения,
который, с помощью АУУ приведет к
увеличению управляющего воздействия
до тех пор, покаy(t)не станет близким или равным задающему
воздействиюy0(t).
В этом случае отклонение равно нулю.
При увеличении управляемой величины
от заданного значения процесс регулирования
происходит аналогично, только знак
отклонениябудет обратным, и АУУ будет стараться
уменьшитьy(t)до заданной величины. Таким образом,
управляющее воздействие на объект
управления подается только в том случае,
если значение управляемой величины не
равно заданному значению. Система будет
поддерживать управляемую величину
постоянной, не зависимо, по какой причине
она изменяется.
сли
управляемая величина уменьшится (рис
1.11), то уменьшитсяy(t)и, соответственно, появиться положительный
сигнал отклонения,
который, с помощью АУУ приведет к
увеличению управляющего воздействия
до тех пор, покаy(t)не станет близким или равным задающему
воздействиюy0(t).
В этом случае отклонение равно нулю.
При увеличении управляемой величины
от заданного значения процесс регулирования
происходит аналогично, только знак
отклонениябудет обратным, и АУУ будет стараться
уменьшитьy(t)до заданной величины. Таким образом,
управляющее воздействие на объект
управления подается только в том случае,
если значение управляемой величины не
равно заданному значению. Система будет
поддерживать управляемую величину
постоянной, не зависимо, по какой причине
она изменяется.
Обратная связь, при которой управляющее воздействие направлено на уменьшение отклонения регулируемой величины от заданного значения, называется отрицательной обратной связью. Она работает так, чтобы противодействовать причине, вызвавшей отклонение. Именно отрицательная обратная связь позволяет осуществить регулирование работы системы. Система управления с обратной связью называется замкнутой, потому что, она как бы замыкает выход (регулируемый параметр) с входом (заданием).