

10.Понятие дискретного автоматизированного устройства.
П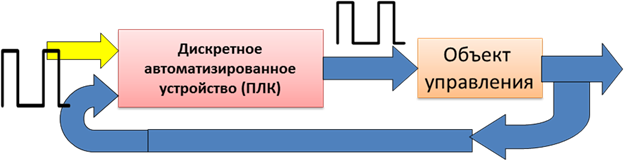 оддискретным автоматизированным
устройствомпонимают управляющее
устройство, осуществляющее переработку
априорной и текущей информации состояния
объекта управления в управляющую
информацию, причем носителями всех
перечисленных составляющих информации
являются дискретные по уровню и во
времени сигналы. Это означает, что
состояние сигнала каждого входа (выхода)
автоматизированного устройства
характеризуется двумя уровнями:минимальным, условно обозначаемым0, имаксимальным, обозначаемым1.
оддискретным автоматизированным
устройствомпонимают управляющее
устройство, осуществляющее переработку
априорной и текущей информации состояния
объекта управления в управляющую
информацию, причем носителями всех
перечисленных составляющих информации
являются дискретные по уровню и во
времени сигналы. Это означает, что
состояние сигнала каждого входа (выхода)
автоматизированного устройства
характеризуется двумя уровнями:минимальным, условно обозначаемым0, имаксимальным, обозначаемым1.
Если рассматривать пример с башенной водокачкой, то функциональная схема системы её управления будет иметь вид, показанный на рис.
Д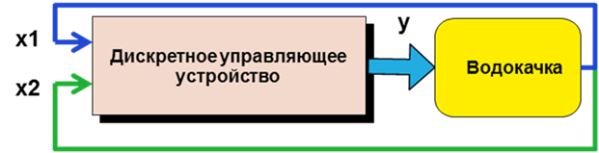 ля
того чтобы построить такую систему
нужно разработать (синтезировать)
дискретное управляющее устройство.
Составление структурной схемы управления
по заданным условиям ее работы называютсинтезом. Определение условий
работы схемы или ее отдельных элементов
по имеющейся структуре называютанализомсхем управления.
ля
того чтобы построить такую систему
нужно разработать (синтезировать)
дискретное управляющее устройство.
Составление структурной схемы управления
по заданным условиям ее работы называютсинтезом. Определение условий
работы схемы или ее отдельных элементов
по имеющейся структуре называютанализомсхем управления.
Построить систему управления можно двумя способами. Первый из них это интуитивный метод. В этом случае, исходя из заданных условий работы отдельных частей объекта управления, сразу составляют принципиальную схему системы автоматики, рациональность и правильность разработки которой зависит от индивидуальных знаний и опыта конструктора. То есть, пытаемся сделать так, как умеем и понимаем. Этот подход дает хороший результат только при наличии соответствующего опыта создания подобных схем. В противном случае он превращается в череду бесплодных попыток сделать что-нибудь методом «тыка».
Другой подход основан на использование теории алгебры логики и принципов формализации реальных условий работы схемы автоматики. Основная задача синтеза здесь заключается в определении такой формы выражения искомой логической функции, которую можно реализовать с применением минимального числа возможно более простых элементов. Синтез схем управления сводится к составлению структурной формулы описывающей логические функции, которые должны выполняться данным устройством.
Этот подход к проектированию дискретных систем управления является методически правильным и обеспечивает успешный синтез реальных устройств управления.
11.Комбинационные автоматы и автоматы с памятью.
Общей функциональной моделью дискретного управляющего устройства является конечный автомат — многополюсник ст входами иr выходами.
Н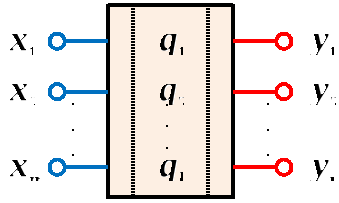 а
входы конечного автомата от датчиков
и командных аппаратов поступают
дискретные сигналы — логические
двухуровневые переменные . На выходах
выделяются дискретные управляющие
воздействия — логические переменные. В преобразовании входных переменных
в выходные участвуют в общем случае
некоторыевнутренние переменные
а
входы конечного автомата от датчиков
и командных аппаратов поступают
дискретные сигналы — логические
двухуровневые переменные . На выходах
выделяются дискретные управляющие
воздействия — логические переменные. В преобразовании входных переменных
в выходные участвуют в общем случае
некоторыевнутренние переменные
Таким образом, выходные переменные, являются функциями входных и внутренних переменных конечного автомата.
Слово «конечный» в названии конечного автомата означает, что числа возможных значений для т входных,lвнутренних иr выходных переменных конечны и равны соответственно
![]()
Конечно и само число возможных функций, выделяющихся на выходах конечного автомата. Состояние конечного автомата на каждом устойчивом такте характеризуется следующими наборами значений переменных на входе, внутри и на выходе автомата:
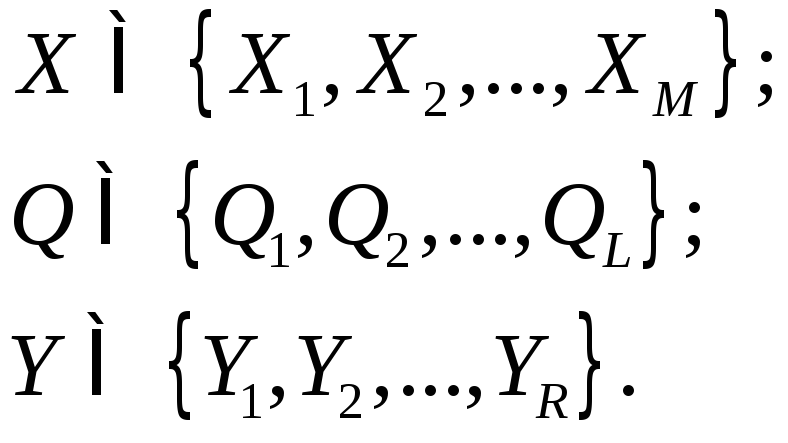
Если представить эти наборы логических
переменных в виде некоторых векторов,
то получим модель конечного автомата
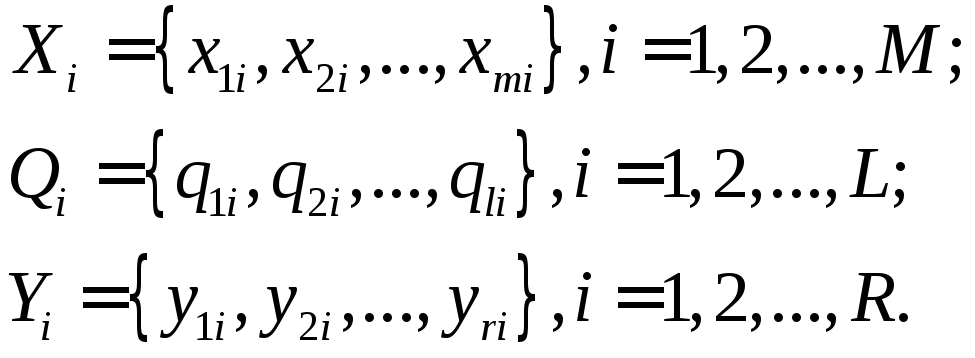
в виде, изображенном на рис.З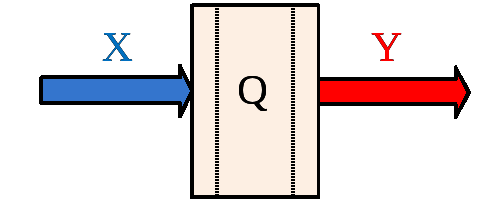 десь
векторы входов, внутренних переменных
и выходов являются элементами следующих
множеств
десь
векторы входов, внутренних переменных
и выходов являются элементами следующих
множеств
Временными интервалами конечного автомата являются такты. Под тактомпонимается изменение какой-либо переменной: входной, внутренней или выходной. Такты бывают устойчивые и неустойчивые. Наустойчивом тактесостояние конечного автомата может сохраняться сколь угодно долго. Переход из одного состояния в другое осуществляется нанеустойчивомкратковременном такте (например, такте включения или отключения). В зависимости от способа перехода конечный автомат относится к асинхронному или синхронному типу.
В асинхронномконечном автомате смена тактов вызывается изменением входной или внутренней переменной. Всинхронномконечном автомате смена тактов происходит по той же причине, но только в моменты действия синхронизирующих импульсов, создаваемых генератором неизменной частоты.
В зависимости от способа формирования логических функций конечные автоматы подразделяются на однотактные, или комбинационные автоматы, и многотактные, или конечные автоматы с памятью.
В комбинационных автоматахфункцииq иу формируются на одном устойчивом такте по значениям входных переменныхх на данном тактеn:
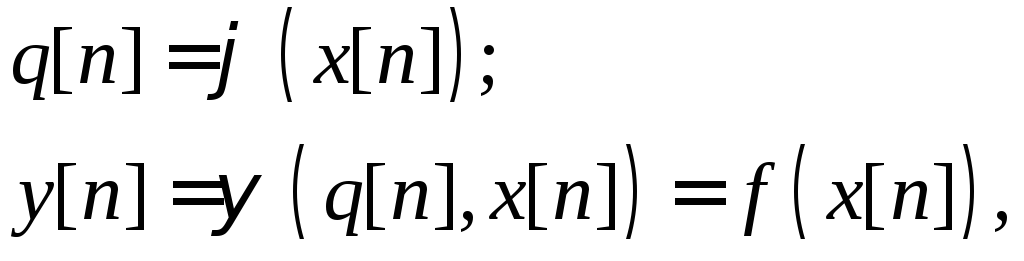
где
![]() - значение входных, внутренних и выходных
переменных наn-ом
такте.
- значение входных, внутренних и выходных
переменных наn-ом
такте.
То есть, выходные переменные комбинационного автомата однозначно определяются значениями входных переменных и каждому набору входных переменных X однозначно соответствует свой набор выходных переменных Y.
Рассмотрим пример комбинационного автомата. Требуется создать логическое устройство для включения двигателя транспортера. Двигатель может быть включен кнопкой непосредственно на пульте управления (логическая функция a=1) или по команде с диспетчерского пульта (b=1). Транспортер работает только тогда, когда включен последующий за ним транспортер (c=1).
Разобьем решение задачи на несколько этапов.
1-й этап- составление таблицы
истинности. В соответствии с условиями
задачи заполняем таблицу истинности,
в которой записываем значение выходной
функцииyв
зависимости от входных функций a,b,cдля всех возможных вариантов их сочетаний.
При трех входных функциях сочетаний![]() ,
то есть таблица будет состоять из 8 строк
и 4 столбцов.
,
то есть таблица будет состоять из 8 строк
и 4 столбцов.
|
a |
b |
c |
y |
|
0 |
0 |
0 |
0 |
|
0 |
0 |
1 |
0 |
|
0 |
1 |
0 |
0 |
|
0 |
1 |
1 |
1 |
|
1 |
0 |
0 |
0 |
|
1 |
0 |
1 |
1 |
|
1 |
1 |
0 |
0 |
|
1 |
1 |
1 |
1 |
Обратите внимание, как более удобно заполнять подобные таблицы, чтобы не запутаться.
2 этап.Составление логического уравнения. Сведения, представленные в таблице истинности, необходимо записать в виде уравнения.
Прежде всего, выделим строки таблицы, в которых y=1. Это строки 4,6,8.
Функция yистинна, если входные переменные имеют значения, соответствующие любой их этих строк. Сформируем это словесно: «Функцияyистинна (равна 1), когда истинныне аивис(строка 4), илиаине вис(строка 6), илиаивис(строка 8)». А теперь заменим слово не на знак операции «НЕ», слово или на знак операции «ИЛИ», а слово и на знак операции «И». Получим
![]() .
.
3 этап.Минимизация этой функции . Можно создать логическое устройство, которое непосредственно реализует полученную функцию. Тогда для выполнения двух инверсий будет необходимо два элемента «НЕ», для триады выполняемой операции «И» необходимо три трехвходовых элемента «И» и, затем, операцию «ИЛИ» на одном трехвходовом элементе «ИЛИ». Всего используем шесть элементов.
Но данное выражение можно упростить.
Вынесем за скобки общий множитель с:![]() ,
а затем и множительb:
,
а затем и множительb:
![]() .
Согласно тождества (2) из п. 2.4, выражение
в круглых скобках
.
Согласно тождества (2) из п. 2.4, выражение
в круглых скобках![]() .
Произведение
.
Произведение![]() (тождество
8). В результате получим
(тождество
8). В результате получим![]() .
Используя тождество (11) заменим выражение
в круглых скобках
.
Используя тождество (11) заменим выражение
в круглых скобках![]() .
Тогда искомая функция примет конечный
упрощенный вид:
.
Тогда искомая функция примет конечный
упрощенный вид:
![]()
Н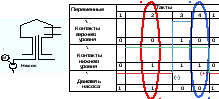 етрудно
заметить, что в нашем случае выходная
величина однозначно определяется
сочетанием входных переменных и её
изменение происходит за один такт при
изменении любой входной величины, то
есть, устройство, реализующее данную
логическую формулу, будет комбинационным
конечным автоматом.
етрудно
заметить, что в нашем случае выходная
величина однозначно определяется
сочетанием входных переменных и её
изменение происходит за один такт при
изменении любой входной величины, то
есть, устройство, реализующее данную
логическую формулу, будет комбинационным
конечным автоматом.
К сожалению, далеко не все задачи управления технологическими процессами могут быть решены с помощью комбинационных автоматов. Для примера вернемся к задаче управления насосом башенной водокачки. На рис приведена циклограмма работы системы управления. Как видно из циклограммы, на втором и четвертом такте входные переменные (контакты датчиков верхнего и нижнего уровня воды) имеют одно и то же значение, а выходная величина (состояние насоса) – разное. На такте 2 двигатель насоса включен, а на такте 4 – выключен. Следовательно, решить задачу путем использования комбинационного автомата невозможно. Здесь нужно учитывать предварительное состояние выходной величины, то есть вводить некоторые внутренние переменные q, которые будут выполнять функции памяти. Поэтому следующий тип конечных автоматов – это автоматы с памятью.
В многотактном автомате (автомате с памятью) функцииq иу на тактеnформируются в зависимости от значений входных переменныхх на данном такте и от значенийq на предыдущем тактеn - 1:
то есть qиy не являются однозначными функциямих, а зависят от предыдущего состояния конечного автомата.
Структуру конечного автомата с памятью можно представить в следующем виде (рис. 3.7).
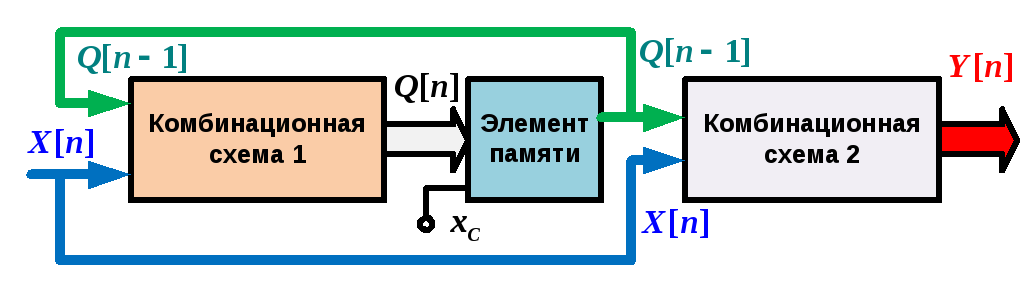
Комбинационная схема 1 выполняет -преобразование и формирует значение внутренней переменной наn-ом такте, которое помещается для хранения в элемент памяти. Из элемента памяти извлекается значение внутренней переменной на предыдущем,n-1 такте, и передается на вторую комбинационную схему, которая выполняет-преобразование и формирует выходной сигнал.
Для логических функций переходов и выходов конечного автомата с памятью, как и для любой логической функции, существуют три формы их представления: табличная, графическая и аналитическая.