

23.Понятие закона регулирования.
С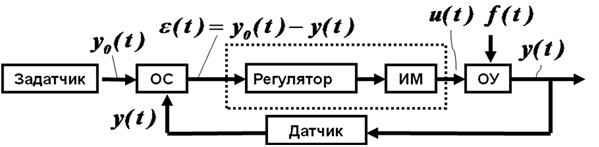 табилизирующие
системы (системы автоматического
регулирования) классифицируются позакону регулирования.
табилизирующие
системы (системы автоматического
регулирования) классифицируются позакону регулирования.
Под законом регулирования в автоматике
понимают математическую зависимость,
по которой автоматическое управляющее
устройство (АУУ) – регулятор воздействует
на объект управления,т.е. зависимость
между управляющим воздействиемU(t)и разницей между заданным значениеy0(t)и реальным значениемy(t)управляемой величины![]() :
:![]() .
.
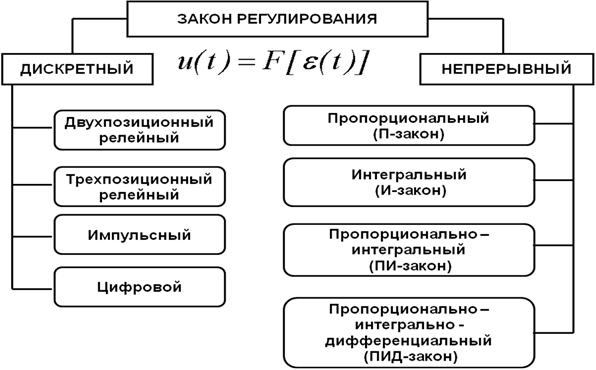
По способу передачи управляющего воздействия на объект управления законы регулирования делятся на непрерывные и дискретные. В системах регулирования с непрерывным законом регулирования управляющее воздействие U(t)непрерывно во времени. Если же, в процессе работы системы, при непрерывном сигнале ошибкиуправляющее воздействиеU(t)прерывается в некоторые промежутки времени или подается в форме отдельных импульсов, то такой закон регулирования называется дискретным.
24.Релейный двухпозиционный закон регулирования
Наиболее простыми и самыми распространенными являются системы автоматического регулирования, использующие разновидность дискретного закона регулирования – релейный двухпозиционный закон регулирования. При этом законе управляющее воздействие, в зависимости от значения ошибки, может принимать только два фиксированных значения: включено – выключено, вверх – вниз, вперед – назад и т.д. На рис. 1.6, а показана данная зависимость.
Релейный закон регулирования технически легко реализовать, он наиболее часто встречается в повседневной жизни. На его основе построена работа таких устройств бытовой техники, как, например, холодильник, электроутюг, обогреватель и т.д. Для его реализации необходим датчик с релейным выходом, т.е. датчик должен скачкообразно изменять выходную величину в зависимости от изменения управляемой величины. На рис. 1.6, б показана схема автоматического регулирования температуры воды электрического водонагревателя с релейным законом регулирования.
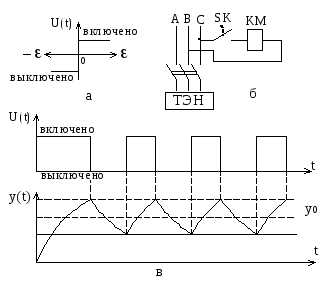
Для измерения температуры воды используется биметаллический датчик, состоящий из биметаллической пластинки и электрических контактов SK. Вода нагревается ТЭНом, который включается с помощью магнитного пускателяKM. При достижении заданной температуры, биметаллическая пластинка датчика нагревается и соответственно изгибается, размыкая электрический контактSK, который включен в цепь катушки магнитного пускателяKM. Магнитный пускатель отключает ТЭН и вода начинает охлаждаться. При охлаждении до определенной температуры биметаллическая пластинка выпрямляется и замыкает контакт в цепи катушки магнитного пускателя. Процесс нагрева повторяется и т.д. На рис. 1.15, в показана кривая изменения температуры воды при подобном законе регулирования. Из нее видно, что управляемая величина (температура) не постоянна во времени, а все время колеблется относительно некоторой средней величины. Амплитуда этих колебаний зависит от свойств объекта управления (его инерционности) и может достигать значительной величины. Таким образом, релейный закон регулирования не обеспечивает достаточной точности регулирования.