

28.Показатели качества процесса регулирования.
Ф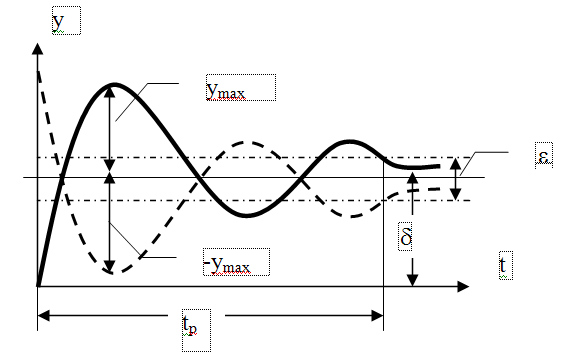 орма
кривой переходного процесса характеризуется
так называемыми показателями качества
системы регулирования. Принято различать
следующие показатели качества устойчивой
системы ). 1.Время регулирования
орма
кривой переходного процесса характеризуется
так называемыми показателями качества
системы регулирования. Принято различать
следующие показатели качества устойчивой
системы ). 1.Время регулирования![]() или время переходного процесса, т. е.
время, в течение которого заканчивается
переходный процесс. По истечении этого
времени
или время переходного процесса, т. е.
время, в течение которого заканчивается
переходный процесс. По истечении этого
времени
![]() ,где
,где![]() - установившееся значениеyпри
- установившееся значениеyпри![]() ,
,![]() —
малая заданная величина, определяе мая
обычно нечувствительностью регулятора
—
малая заданная величина, определяе мая
обычно нечувствительностью регулятора![]() .
Время регулирования характеризует
быстродействие системы. Чем меньше это
время, тем выше быстродействие.
Быстродействие является важнейшим
показателем качества, нередко определяющим
при проектировании структуру схемы и
применение тех или иных элементов
системы. 2.Перерегулирование,
характеризующее максимальное отклонение
регулируемой величины от установившегося
значения. Перерегулирование определяется
как
.
Время регулирования характеризует
быстродействие системы. Чем меньше это
время, тем выше быстродействие.
Быстродействие является важнейшим
показателем качества, нередко определяющим
при проектировании структуру схемы и
применение тех или иных элементов
системы. 2.Перерегулирование,
характеризующее максимальное отклонение
регулируемой величины от установившегося
значения. Перерегулирование определяется
как![]() .
.
3. Колебательностьпроцесса
регулирования, который характеризуют
числом колебаний регулируемой величины
в переходном процессе. 4.Нечувствительностьсистемы регулирования![]() .
Под этим показателем качества понимают
максимальные отклонения регулируемой
величины от установившегося значения,
в пределах которых регулятор не оказывает
регулирующего воздействия. Нечувствительность
системы зависит от сил сухого трения в
отдельных элементах, от зазоров, мертвых
ходов и т. д. В современных системах
нечувствительность доведена до очень
малых значений. 5.Статическая ошибка
.
Под этим показателем качества понимают
максимальные отклонения регулируемой
величины от установившегося значения,
в пределах которых регулятор не оказывает
регулирующего воздействия. Нечувствительность
системы зависит от сил сухого трения в
отдельных элементах, от зазоров, мертвых
ходов и т. д. В современных системах
нечувствительность доведена до очень
малых значений. 5.Статическая ошибка![]() ,
определяющая статическую точность
регулирования. Хотя статическая ошибка
характеризует статический, установившийся
режим, ее обычно рассматривают как один
из показателей качества динамической
системы в целом. Говорят, что система
обладает требуемым качеством, если
время регулирования, перерегулирование,
колебательность, нечувствительность
и статическая ошибка не превышают
некоторых заранее заданных значений.
В зависимости от назначения регулятора
требования к качеству могут быть
различными. В некоторых случаях, например,
требуется, чтобы переходный процесс
протекал вообще без колебаний и
перерегулирования.
,
определяющая статическую точность
регулирования. Хотя статическая ошибка
характеризует статический, установившийся
режим, ее обычно рассматривают как один
из показателей качества динамической
системы в целом. Говорят, что система
обладает требуемым качеством, если
время регулирования, перерегулирование,
колебательность, нечувствительность
и статическая ошибка не превышают
некоторых заранее заданных значений.
В зависимости от назначения регулятора
требования к качеству могут быть
различными. В некоторых случаях, например,
требуется, чтобы переходный процесс
протекал вообще без колебаний и
перерегулирования.
29.Определение устойчивости систем автоматического управления.
П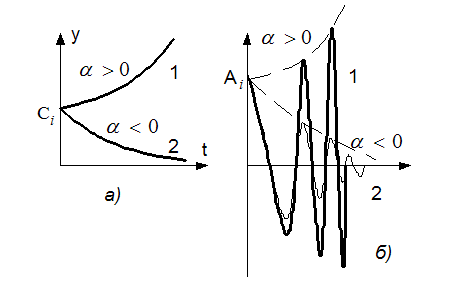 оведение
системы в переходном процессе можно
представить в виде суммы двух составляющих:
оведение
системы в переходном процессе можно
представить в виде суммы двух составляющих:
![]() .
Первая из них,
.
Первая из них,
![]() - свободное движение системы, то есть
движение системы, выведенной из состояния
равновесия начальными условиями и
представленной самой себе. Вторая,
- свободное движение системы, то есть
движение системы, выведенной из состояния
равновесия начальными условиями и
представленной самой себе. Вторая,
![]() - вынужденное движение системы,
обусловленное внешним воздействием.
Применительно к выражению, условие
устойчивости системы можно сформулировать
следующим образом.Система устойчива,
если с течением времени от начала
переходного процесса его свободная
составляющая
- вынужденное движение системы,
обусловленное внешним воздействием.
Применительно к выражению, условие
устойчивости системы можно сформулировать
следующим образом.Система устойчива,
если с течением времени от начала
переходного процесса его свободная
составляющая
![]() стремиться к нулю:
стремиться к нулю:![]() .
Передаточная функция системы
автоматического управления относительно
любого возмущения имеет следующий вид
.
Передаточная функция системы
автоматического управления относительно
любого возмущения имеет следующий вид![]() ,
где
,
где![]() ,
,![]() - соответствующие полиномы отs.
Если обозначить входное воздействие
на систему (изменение задания или внешнее
возмущение) какx(s),
а ее реакцию (переходной процесс) какy(s),
то, используя определение передаточной
функции
- соответствующие полиномы отs.
Если обозначить входное воздействие
на систему (изменение задания или внешнее
возмущение) какx(s),
а ее реакцию (переходной процесс) какy(s),
то, используя определение передаточной
функции![]() ,
выражение можно переписать как
,
выражение можно переписать как![]() .
Применим к уравнению обратное
преобразование Лапласа. Получим линейное
дифференциальное уравнение с правой
частью. Решением данного уравнения и
будет кривая переходного процессаy(t).
Свободное движение системы определяется
как решение однородного дифференциального
уравнения с нулевой правой частью
.
Применим к уравнению обратное
преобразование Лапласа. Получим линейное
дифференциальное уравнение с правой
частью. Решением данного уравнения и
будет кривая переходного процессаy(t).
Свободное движение системы определяется
как решение однородного дифференциального
уравнения с нулевой правой частью![]() .
Решение однородного дифференциального
уравнения свободного движения имеет
вид
.
Решение однородного дифференциального
уравнения свободного движения имеет
вид![]() ,
где
,
где![]() -
постоянные интегрирования;
-
постоянные интегрирования;![]() - корни характеристического уравнения.
Характеристическое уравнение
- корни характеристического уравнения.
Характеристическое уравнение![]() .
Каждому вещественному корню
.
Каждому вещественному корню![]() в выражении соответствует составляющая
решения, имеющая вид показательной
функции
в выражении соответствует составляющая
решения, имеющая вид показательной
функции![]() ,
характер которой зависит от знака корня.
Если корень положителен (
,
характер которой зависит от знака корня.
Если корень положителен (![]() ),
то с ростомtзначениеyбудет возрастать
(кривая 1 на рис. 5.2а). Если же корень
отрицателен (
),
то с ростомtзначениеyбудет возрастать
(кривая 1 на рис. 5.2а). Если же корень
отрицателен (![]() ),
то соответствующая ему составляющая
будет убывать и с течением времени
стремиться к нулю (кривая 2 на рис. 5.2а).
Если все корни характеристического
уравнения вещественны и отрицательны,
то и все выражение (5.7) с течением времени
будет стремиться к нулю. Наличие хотя
бы одного положительного корня приведет
к тому, что с течением времени составляющая
),
то соответствующая ему составляющая
будет убывать и с течением времени
стремиться к нулю (кривая 2 на рис. 5.2а).
Если все корни характеристического
уравнения вещественны и отрицательны,
то и все выражение (5.7) с течением времени
будет стремиться к нулю. Наличие хотя
бы одного положительного корня приведет
к тому, что с течением времени составляющая![]() будет стремиться к бесконечности, то
есть нарушается условие устойчивости
системы (5.2). Если хотя бы один из корней
окажется равным нулю (при всех прочих
отрицательных корнях), то одна из
составляющих
будет стремиться к бесконечности, то
есть нарушается условие устойчивости
системы (5.2). Если хотя бы один из корней
окажется равным нулю (при всех прочих
отрицательных корнях), то одна из
составляющих![]() при любых значениях времени будет
постоянной, вследствие чего условие
устойчивости (5.2) также не будет
соблюдаться. Следовательно, необходимым
условием устойчивости системы является
условие отрицательности всех вещественных
корней характеристического уравнения,
полученного из характеристического
многочлена передаточной функции системы.
Если корни характеристического уравнения
комплексные, то каждая пара комплексных
сопряженных корней
при любых значениях времени будет
постоянной, вследствие чего условие
устойчивости (5.2) также не будет
соблюдаться. Следовательно, необходимым
условием устойчивости системы является
условие отрицательности всех вещественных
корней характеристического уравнения,
полученного из характеристического
многочлена передаточной функции системы.
Если корни характеристического уравнения
комплексные, то каждая пара комплексных
сопряженных корней![]() и
и![]() дает составляющую переходного процесса
в виде произведения показательной и
синусоидальной функций. При отрицательном
значении вещественной части корня,
амплитуда данной составляющей стремиться
к нулю (кривая 2 на рис. 5.2б), а при
положительном – возрастает с течением
времени (кривая 1 на рис. 5.2б). При чисто
мнимом корне (вещественная часть равна
нулю) получаем составляющую с незатухающими
синусоидальными колебаниями.
дает составляющую переходного процесса
в виде произведения показательной и
синусоидальной функций. При отрицательном
значении вещественной части корня,
амплитуда данной составляющей стремиться
к нулю (кривая 2 на рис. 5.2б), а при
положительном – возрастает с течением
времени (кривая 1 на рис. 5.2б). При чисто
мнимом корне (вещественная часть равна
нулю) получаем составляющую с незатухающими
синусоидальными колебаниями.
Чтобы все составляющие решения дифференциального уравнения (5.7), относящиеся к комплексным корням с течением времени затухали, необходимо, чтобы вещественные части всех комплексных корней были отрицательными. Таким образом, необходимым и достаточным условием устойчивости линейной системы автоматического управления является отрицательное значение вещественной части всех корней характеристического уравнения, построенного по характеристическому многочлену передаточной функции системы.