

1.4. Интегральные формулы векторного анализа
Теорема Остроградского-Гаусса
|
|
(1.33) |
Теорема Стокса:
|
|
(1.34) |
Теорема Грина (первая формула)
|
|
(1.35) |
Теорема Грина (вторая формула)
|
|
(1.36) |
Аналог теоремы Остроградского - Гаусса для ротора:
|
|
(1.37) |
|
|
| ||
|
| ||
|
|
|
Рис. 1.6. Дельта-функция Дирака |
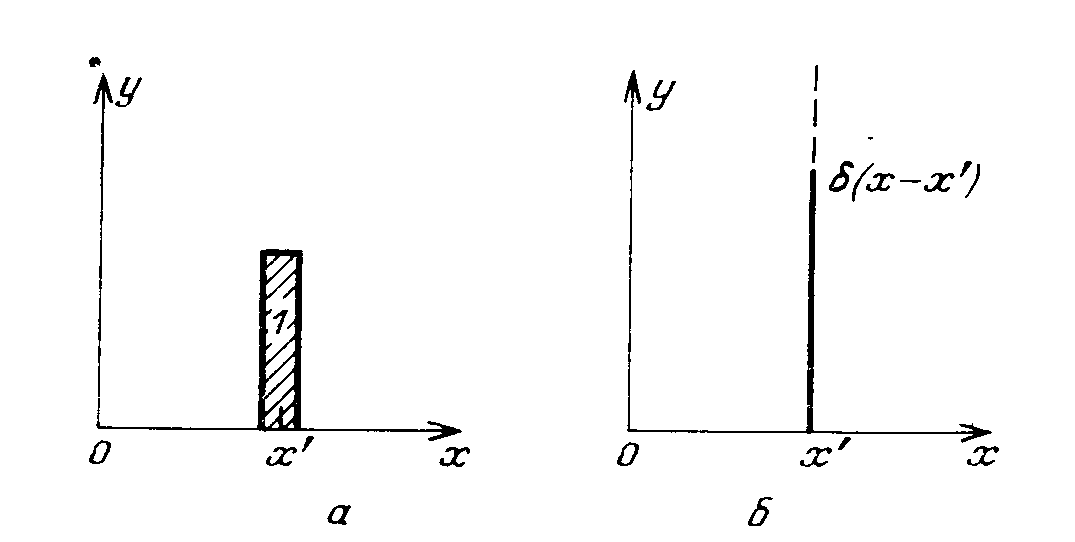
1.5. Дельта-функция Дирака
Дельта-функция Дирака вводится следующим образом. Рассмотрим прямоугольный импульс площадью равной единице. Он изображен на рис. 1.6,а. Устремим ширину импульса к нулю, сохраняя его площадь постоянной. В результате получим функцию, значение которой не ограничено в точке x' (рис. 1.6,б), а во всех остальных точках равно нулю. Это и есть дельта-функция Дирака, которая обозначается δ(x - x').
Можно утверждать, что для всякой обычной функции f(x) будет справедливо равенство:
|
|
(1.38) |
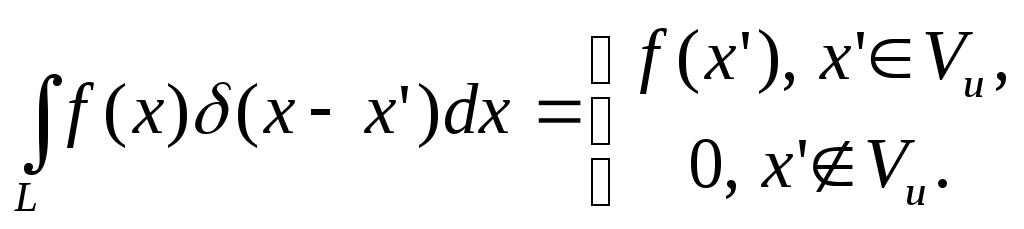
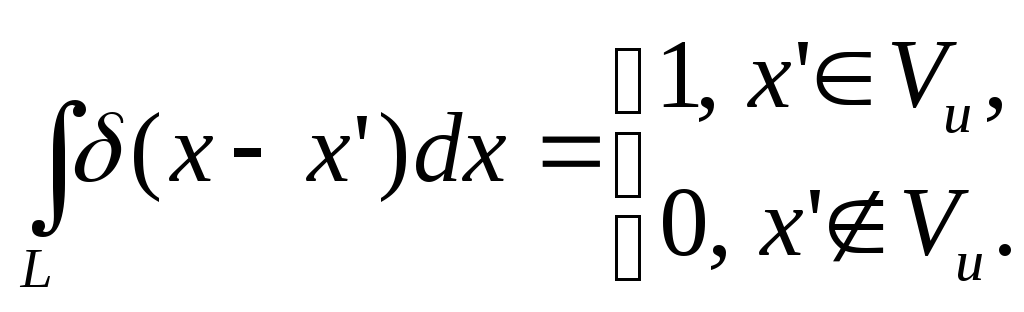
Равенство (1.38) является определением дельта-функции посредством функционала. В частности, при f(x) = 1 получим:
|
|
(1.39) |
Определение (1.38) обобщается на трехмерные области следующим образом:
|
|
(1.40) |

В этой записи точка задается при помощи радиус-вектора r. В качестве частного случая можно взять f(r) = 1 и получить аналог формулы (1.39).
2. Системы координат
2.1. Градиент длины направленного отрезка
|
|
|
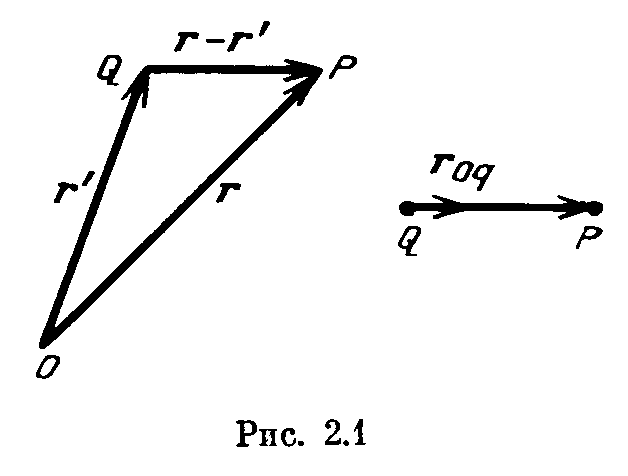
Рис. 2.1. Определение расстояния между точками |
|
|
|
|
Тогда длина направленного отрезка QP = r - r’ определяется следующим выражением:
|
|
Градиент этого скаляра можно определить с помощью формулы (1.14):
|
|
(2.1) |
Здесь символом r0Q обозначен орт с направлением r - r'. Расстояние |r - r'| - это функция положения точки Р при фиксированной точке Q.
Если зафиксировать точку Р, расстояние |r - r'| необходимо рассматривать как функцию координат х', у', z’. Градиент по этим координатам записывается в виде:
|
|
(2.2) |
Штрих, отмечающий градиент, используется для обозначения операции по штриховым координатам.
В дальнейшем встретятся такие скалярные функции от |r - r'|, как |r - r'|-1 и |r - r'|-2. Вычисляя для них grad или grad', следует использовать формулу (1.29) вместе с формулами (2.1) или (2.2).
2.2. Операции векторного анализа в криволинейных координатах
Обозначения криволинейных ортогональных координат и относящихся к ним величин приведены в таблице 2.1.
Таблица 2.1
Обозначения элементов криволинейных ортогональных систем координат
|
Номер координаты |
1 |
2 |
3 |
|
Координата |
q1 |
q2 |
q3 |
|
Орт |
e1 |
e2 |
e3 |
|
Метрический коэффициент |
h1 |
h2 |
h3 |
Метрические коэффициенты (коэффициенты Лямэ) участвуют в соотношениях вида dli = hidqi, где dqi - дифференциал координаты, a dli - дифференциал длины по этой координате.
Две наиболее распространенные криволинейные системы координат, сферическая и цилиндрическая, изображены на рис. 2.2. Они показаны вместе с декартовой системой, которая указывает начало отсчета углов. Из рис. 2.2,а видно, что для сферической системы координат h2 = r есть радиус дуги угла υ, a h3 = г sin υ - радиус дуги угла α, проходящей через точку Р. Для цилиндрической системы координат (рис. 2.2,б) h2 = r есть радиус дуги угла α.
|
|
|
|
Рис. 2.2. Сферическая (а) и цилиндрическая (б) системы координат | |
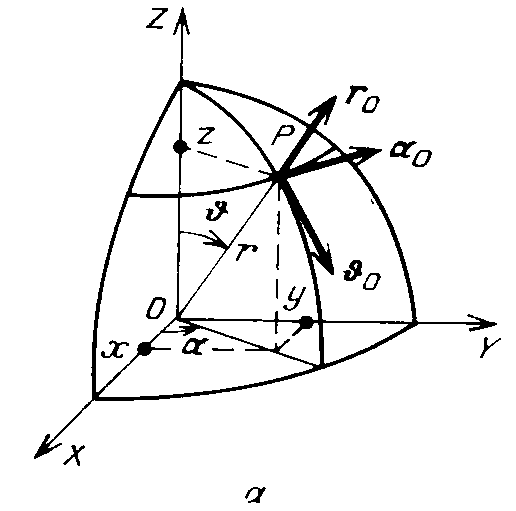
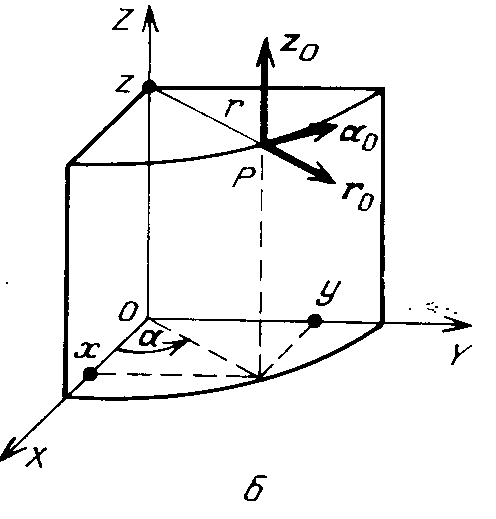
Таблица 2.2
Основные криволинейные координаты
|
i |
Сферические координаты |
Цилиндрические координаты | ||||
|
1 |
2 |
3 |
1 |
2 |
3 | |
|
qi |
r |
υ |
α |
r |
α |
z |
|
ei |
r0 |
υ0 |
α0 |
r0 |
α0 |
z0 |
|
hi |
1 |
r |
r sin υ |
1 |
r |
1 |
Смысл метрических коэффициентов понятен из рисунка. Орты по угловым координатам обозначаются так же, как и углы (например, орт υ0 для координаты υ). Это единичные векторы, направленные по касательной к соответствующим дугам в сторону возрастания углов.
Координаты точки, определенные в разных системах, связаны простыми и очевидными соотношениями:
|
Декартова и цилиндрическая системы координат: | ||||||
|
|
(2.3) |
|
(2.4) |
|
(2.5) | |
|
|
(2.6) |
|
(2.7) |
| ||
|
Декартова и сферическая системы координат: | ||||||||
|
|
(2.8) |
|
(2.9) |
|
(2.10) | |||
|
|
(2.11) |
|
(2.12) | |||||
|
|
(2.13) |
| ||||||
Формулы, выражающие операции векторного анализа в криволинейных ортогональных координатах, имеют следующий вид:
|
|
(2.14) |
|
|
(2.15) |
|
|
(2.16) |


Применение оператора Лапласа к скалярной функции дает следующий результат:
|
|
(2.17) |

Формулы (2.14) - (2.17) легко конкретизируются в сферических и цилиндрических координатах при помощи данных из таблицы 2.2.