

§ 9. Алгебраический момент пары сил
Поскольку момент пары сил равен моменту одной из ее сил относительно точки приложения другой силы (15)
![]() или
или
![]() ,
,
то для пар, лежащих в одной плоскости, момент пары можно рассматривать как алгебраическую величину и обозначать символом m. При этом алгебраический момент пары равен взятому с соответствующим знаком произведению модуля одной из сил пары на плечо пары:
![]() .
(18)
.
(18)
Правило
знаков здесь такое же, как и для
алгебраического момента силы:
алгебраический момент пары сил имеет
знак плюс, если пара сил стремится
вращать тело против часовой стрелки, и
знак минус, если пара сил стремится
вращать тело по часовой стрелке. Так,
для изображенной на рис. 21, а
пары
![]() ,
,![]() ,
момент
,
момент![]() ,
а для пары
,
а для пары![]() ,
,![]() ,
момент
,
момент![]() .
Поскольку пара сил характеризуется
только ее моментом, то на рисунках пару
изображают часто просто дуговой стрелкой
(рис. 21,
б).
.
Поскольку пара сил характеризуется
только ее моментом, то на рисунках пару
изображают часто просто дуговой стрелкой
(рис. 21,
б).
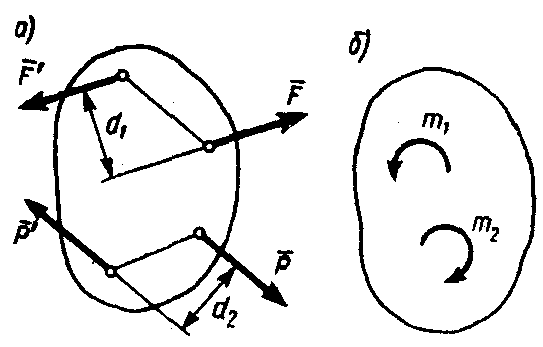
Рис. 21
Глава 3. Приведение системы сил к центру. Условия равновесия
§10. Теорема о параллельном переносе силы
В задачах на равновесие тел сила может быть перенесена в любую точку на линии ее действия.
Теорема: силу, приложенную к абсолютно твердому телу, можно, не изменяя оказываемого ею действия, переносить из данной точки в любую другую точку тела, прибавляя при этом пару с моментом, равным моменту переносимой силы относительно точки, куда сила переносится.
Пусть
на твердое тело действует сила
![]() ,
приложенная в точке А (рис. 22). Действие
этой силы не изменится, если в любой
точке В тела приложить две уравновешенные
силы
,
приложенная в точке А (рис. 22). Действие
этой силы не изменится, если в любой
точке В тела приложить две уравновешенные
силы![]() и
и![]() ,
такие, что
,
такие, что![]() ,
,![]() .
.
Полученная
система трех сил и представляет собой
силу
![]() ,
равную
,
равную![]() ,
но приложенную в точке В, и пару
,
но приложенную в точке В, и пару![]() ,
,![]() с моментом
с моментом
![]() .
(19)
.
(19)

Рис. 22
Последнее равенство следует из формулы (15). Таким образом, теорема доказана.
§11. Приведение произвольной системы сил к центру
Теорема о приведении системы сил: любая
система сил, действующих на абсолютно
твердое тело, при приведении к произвольно
выбранному центру О заменяется одной
силой
![]() ,
равной главному вектору системы сил и
приложенной в центре приведения О, и
одной парой с моментом
,
равной главному вектору системы сил и
приложенной в центре приведения О, и
одной парой с моментом![]() ,
равным главному моменту системы сил
относительно центра О (рис. 23, б).
,
равным главному моменту системы сил
относительно центра О (рис. 23, б).
Пусть
на твердое тело действует произвольная
система сил
![]() ,
,![]() , …,
, …,![]() (рис. 23, а). Выберем точку О за центр
приведения и, пользуясь теоремой,
доказанной в §10, перенесем все силы в
центр О, присоединяя при этом соответствующие
пары. Тогда на тело будет действовать
система сил
(рис. 23, а). Выберем точку О за центр
приведения и, пользуясь теоремой,
доказанной в §10, перенесем все силы в
центр О, присоединяя при этом соответствующие
пары. Тогда на тело будет действовать
система сил
![]() ,
, ![]() , …,
, …,![]() ,
(20)
,
(20)
приложенных в центре О, и система пар, моменты которых согласно формуле (19) равны:
![]() , ,
, ,
![]() , …,
, …, ![]() .
(21)
.
(21)
Сходящиеся
силы, приложенные в точке О, заменяются
одной силой
![]() ,
приложенной в точке О. При этом
,
приложенной в точке О. При этом![]() или, согласно равенствам. (20)
или, согласно равенствам. (20)
![]() .
(22)
.
(22)
Чтобы
сложить все полученные пары, надо сложить
векторы моментов этих пар. В результате
система пар заменяется одной парой,
момент которой
![]() или, согласно равенствам (21)
или, согласно равенствам (21)
![]() .
(23)
.
(23)
Как
известно величина
![]() равная геометрической сумме всех сил,
называется главным вектором системы
сил; величина
равная геометрической сумме всех сил,
называется главным вектором системы
сил; величина![]() ,
равная геометрической сумме моментов
всех сил относительно центра О, называется
главным моментом системы сил относительно
этого центра.
,
равная геометрической сумме моментов
всех сил относительно центра О, называется
главным моментом системы сил относительно
этого центра.
Таким образом, теорема доказана.
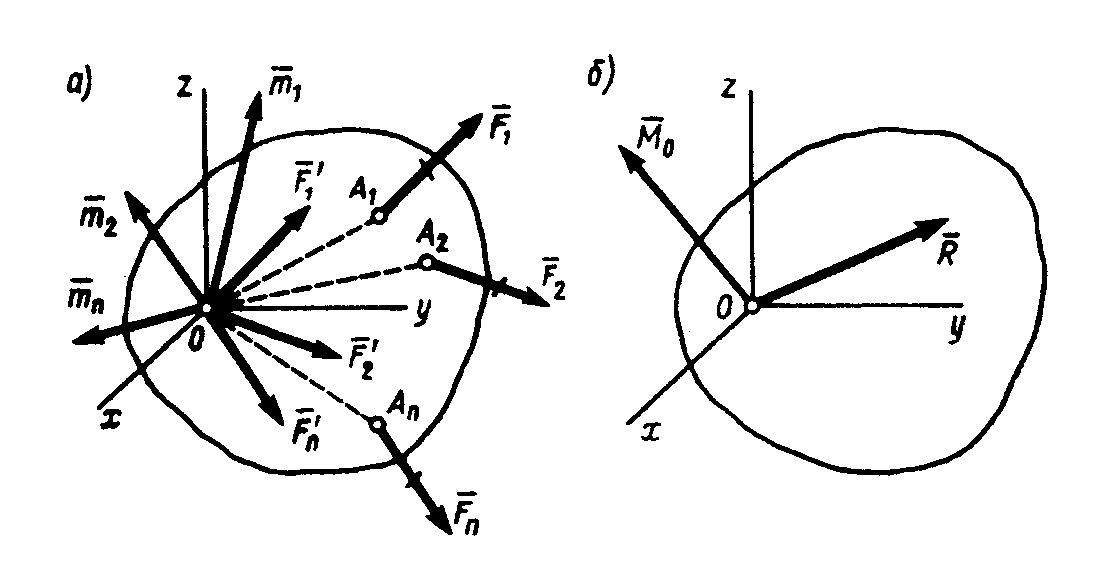
Рис. 23
Заметим,
что сила
![]() не является здесь равнодействующей
данной системы сил, так как заменяет
систему сил не одна, а вместе с парой.
не является здесь равнодействующей
данной системы сил, так как заменяет
систему сил не одна, а вместе с парой.
Отметим,
что значение
![]() от выбора центра О не зависит. Значение
же
от выбора центра О не зависит. Значение
же![]() при изменении центра О может изменится
вследствие изменения значений моментов
отдельных сил.
при изменении центра О может изменится
вследствие изменения значений моментов
отдельных сил.
Рассмотрим в заключение частные случаи:
1) если для данной системы сил
![]() ,
а
,
а![]() ,
то она приводится к одной паре сил с
моментом
,
то она приводится к одной паре сил с
моментом![]() .
В этом случае значение
.
В этом случае значение![]() не зависит от выбора центра О, так как
иначе получилось бы, что одна и та же
система сил заменяется разными, не
эквивалентными друг другу парами, что
не возможно; 2) если для данной системы
сил
не зависит от выбора центра О, так как
иначе получилось бы, что одна и та же
система сил заменяется разными, не
эквивалентными друг другу парами, что
не возможно; 2) если для данной системы
сил![]() ,
а
,
а![]() ,
то она приводится к одной силе т.е.
равнодействующей, равной
,
то она приводится к одной силе т.е.
равнодействующей, равной![]() и приложенной в центре О.
и приложенной в центре О.