

§ 14. Равновесие плоской системы сил. Случай параллельных сил
Необходимые и достаточные условия равновесия любой системы сил даются равенствами
![]() ,
,
![]() ,
,
выражаемыми формулами (24). Найдем вытекающие отсюда аналитические условия равновесия плоской системы сил.
1. Основная
форма условий равновесия. Так как вектор
![]() равен нулю, когда равны нулю его проекции
Rx
и Ry,
то для равновесия должны выполняться
равенства Rx = 0,
Ry = 0
и MO = 0,
где в данном случае MO –
алгебраический момент, а О – любая точка
в плоскости сил. Но из формул (26) следует,
что предыдущие равенства будут выполнены,
когда действующие силы удовлетворяют
условиям:
равен нулю, когда равны нулю его проекции
Rx
и Ry,
то для равновесия должны выполняться
равенства Rx = 0,
Ry = 0
и MO = 0,
где в данном случае MO –
алгебраический момент, а О – любая точка
в плоскости сил. Но из формул (26) следует,
что предыдущие равенства будут выполнены,
когда действующие силы удовлетворяют
условиям:
![]() ,
,
![]() ,
,![]() .
(28)
.
(28)
Формулы (28) выражают следующие аналитические условия равновесия: для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы проекций сил на каждую из двух координатных осей и сумма их моментов относительно любого центра, лежащего в плоскости действия сил, были равны нулю. Одновременно равенства (28) выражают условия равновесия твердого тела, находящегося под действием плоской системы сил.
2. Вторая форма условий равновесия: для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы моментов сил относительно каких-нибудь двух центров А и В и сумма их проекций на ось Оx, не перпендикулярную прямой АВ, были равны нулю:
![]() ,
,
![]() ,
,![]() .
(29)
.
(29)
Необходимость
условий очевидна, так как если любое из
них не выполняется, то или
![]() ;
или
;
или
![]() (
(![]() )
и равновесия не будет. Докажем их
достаточность. Если для данной системы
сил выполняются только первые два из
условий (35), то для нее MA = 0
и MB = 0.
Такая система может не находится в
равновесии, а иметь равнодействующую
)
и равновесия не будет. Докажем их
достаточность. Если для данной системы
сил выполняются только первые два из
условий (35), то для нее MA = 0
и MB = 0.
Такая система может не находится в
равновесии, а иметь равнодействующую
![]() ,
одновременно проходящую через точки А
и В (рис. 26).
Но по третьему условию должно быть
,
одновременно проходящую через точки А
и В (рис. 26).
Но по третьему условию должно быть
![]() .
Так как ось Оx проведена не перпендикулярно
к АВ, то последнее условие может быть
выполнено, только когда
.
Так как ось Оx проведена не перпендикулярно
к АВ, то последнее условие может быть
выполнено, только когда![]() ,
т.е. когда имеет место равновесие.
,
т.е. когда имеет место равновесие.
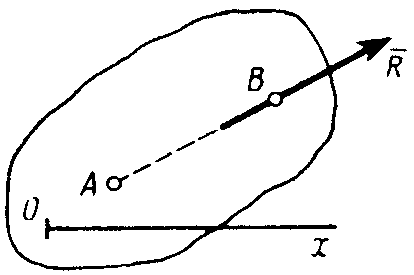
Рис. 26
3. Третья форма условий равновесия (уравнения трех моментов): для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы моментов всех этих сил относительно любых трех центров А, В и С, не лежащих на одной прямой, были равны нулю:
![]() ,
,![]() ,
,![]() .
(30)
.
(30)
Необходимость условий очевидна. Достаточность условий (30) следует из того, что если при одновременном выполнении этих условий данная система сил не находилась бы в равновесии, то она должна была бы приводится к равнодействующей, одновременно проходящей через точки А, В и С, что невозможно, так как эти точки не лежат на одной прямой. Следовательно, при выполнении условий (30) имеет место равновесие.
4. Равновесие плоской системы
параллельных сил. В случае, когда силы
параллельны друг другу, можно направить
ось Оx перпендикулярно силам, а ось Оy
параллельно им (рис. 27).
Тогда проекция каждой из сил на ось Оx
будет равна нулю и первое из равенств
(28) обратится в тождество вида![]() .
В результате для параллельных сил
останется два условия равновесия:
.
В результате для параллельных сил
останется два условия равновесия:
![]() ,
,![]() . (31)
. (31)
где Оy параллельна силам.
Другая форма условий равновесия для параллельных сил, получающаяся из равенств (29), имеет вид:
![]() ,
,![]() .
(32)
.
(32)
При этом точки А и В не должны лежать на прямой, параллельной силам.
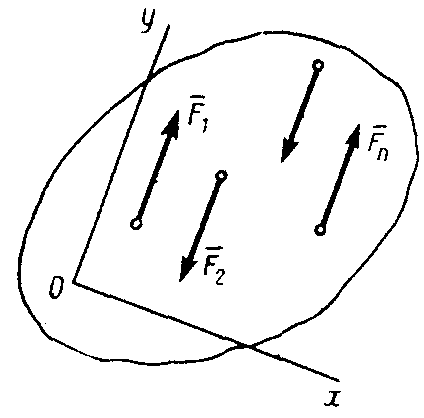
Рис. 27