

Принцип работы: когда открыт VT2 земля 1 соединена с землей 2 через открытый VT2, VT1 при этом закрыт, следовательно предмощный каскад 2 запитывается обычным образом, а каскад 1 – через диод VD (высоковольтный, быстродействующий), открытый VT2, управляется транзистор VT1 и заряжается конденсатор С до напряжения источника питания. После переключения пары закрывается VT2, открывается VT1, питание предмощного каскада 2 осуществляется обычным образом, как и было, диод VD закрывается высоким напряжением +E0, так как VT2 закрыт, земля 1 отключается от земли 2, но питание предмощного каскада 1 продолжается от бутстрепного конденсатора С, при закрытом диоде VD, следовательно величина заряда энергии конденсатора С должна быть достаточна для самого длинного импульса, открывающего или закрывающего ключ VT1. В случаях постоянного управления (отсутствия импульсов) и биполярных транзисторов эта схема непригодна. Настоящей гальванической развязки между предмощными каскадами здесь нет, при пробое VD выжигаются оба каскада и источник питания.
1.14 Тиристорные схемы управления
Выделяют несколько способов управления.
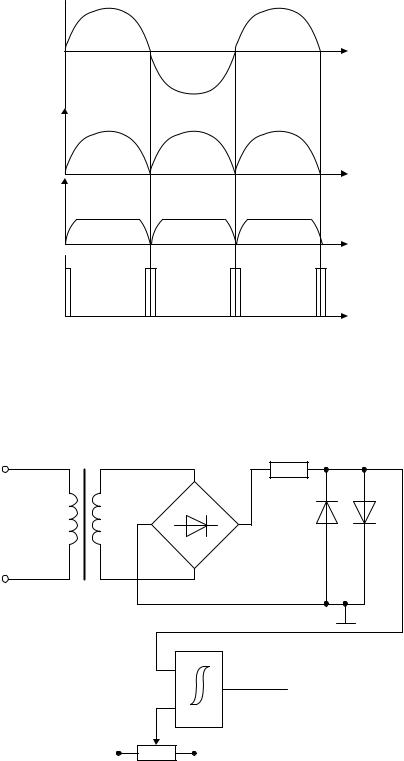
1 Амплитудное управление тиристорами (вертикальное – рисунок 1.51), при котором на управляющий электрод подается два напряжения в сумме. Одно из них Uупр1 той же частоты, что и сетевое и той же фазы, второе – постоянное напряжение Uупр2, амплитуда которого изменяется по уровню вверх–вниз по вертикали. Следовательно, на четвертом графике рисунка 1.51 точка 1 может перемещаться влево–вправо, а тиристор открывается при переходе напряжения четвертого графика в плюсовую область, поэтому на пятом графике – ШИМ.
57
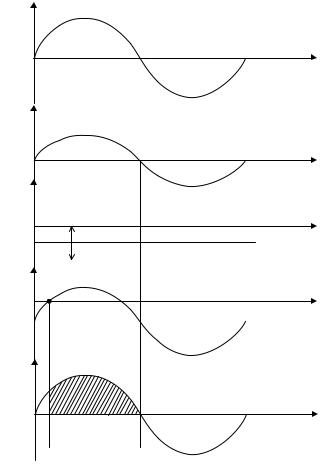
Рисунок 1.51 – Амплитудное управление
Достоинство: несложность.
Недостаток: регулирование только в пределах 90°.
2 Фазовый способ управления (см. рисунок 1.52). При нем изменяется фаза управляемого напряжения влево–вправо при той же частоте, следовательно, диапазон регулирования ШИМ от 0° до 180°.
58
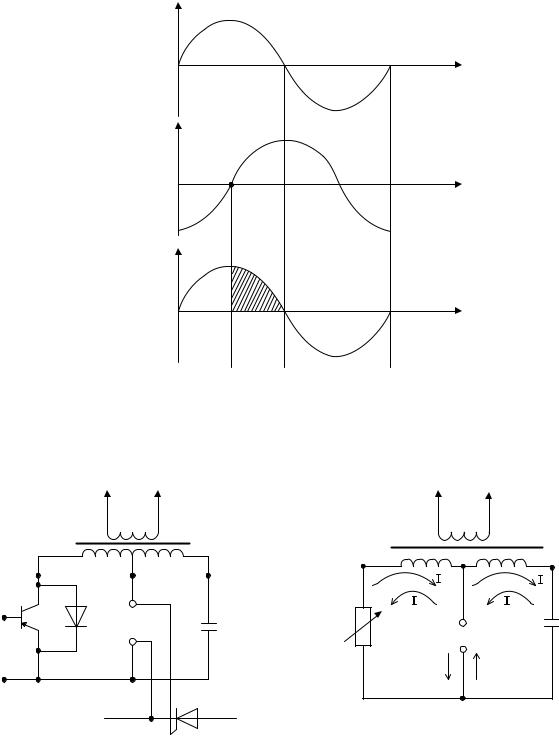
Рисунок 1.52 – Фазовый способ управления
На рисунке 1.53 представлена схема фазовращателя.
Uc |
Uc |
|
Тр |
|
3 Тр |
1 |
2 |
1 |
2 |
3 |
VT1
VD |
C |
вых |
С |
|
|||
|
|
|
|
|
I |
|
I |
|
VT2 |
|
|
а) |
|
б) |
|
Рисунок 1.53 – Фазовращатель
Для тиристора VT2 с током примерно 10А удовлетворяют следующие данные. Первичное напряжение Uс=220 В, 50 Гц, число витков первичной обмотки 3 – 5 тысяч, трансформатор мощностью 10 Вт, напряжение каждого плеча вторичной
обмотки 15 В, конденсатор – не электролит, С=2 мкФ.
Транзистор VT1 рассчитан на ток 100 – 200 мА, при пропускании тока в цепи Э – Б изменяется сопротивление от максимума примерно до 20 – 30 Ом. Чем больше напряжение (ток) в базовой цепи VT1, тем меньше сопротивление, т. е.
59
образуется транзисторный эквивалент потенциометра. Диод VD защищает VT1 от несвойственных полупериодов сетевого напряжения.
Регулируемый угол фазовращения от 0° до 180° при неизменной амплитуде регулируемого напряжения.
Процессы фазовращения иллюстрируются схемой рисунка 1.53, б.
При нулевом сопротивлении потенциометра протекают два тока. Если сопротивление потенциометра нулевое, то ток контура 1 – 2 превалирует, он определяет фазу.
При бесконечном сопротивлении основным током будет являться ток контура 2
– 3. Таким образом для этих крайних случаев на выходе фазы противоположны, фазовый сдвиг 180°. Если теперь плавно изменять сопротивление потенциометра, то также вследствие наличия емкости будет наблюдаться плавное изменение фазы– фазовращение.
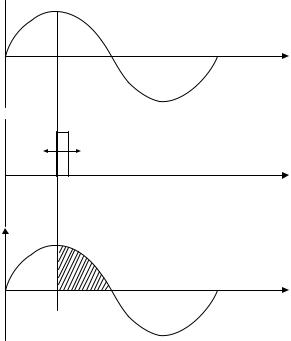
3 Импульсное управление (см. рисунок 1.54).
Uc
t
Uу 
t
UШИМ
t
Рисунок 1.54 – Импульсное управление
При импульсном способе изменяется момент его положения на горизонтальной оси влево–вправо, т. е. производится ШИМ регулирование по третьему графику.
Достоинство: импульс в течение короткого времени (10–20 мкс), в остальное время мощность в цепи управления не расходуется.
Для реализации третьего способа наиболее часто используют:
1 Сравнение модулирующего напряжения с пилообразным (см. рисунок 1.55).
60
Рисунок 1.55 – Сравнение модулирующего напряжения с  пилообразным
пилообразным
Пилообразное напряжение формируется синхронным сетевому Uc. На втором графике модулирующее напряжение, амплитуда может меняться вниз–вверх. Точка 1 смещается вдоль пилы влево или вправо.
Недостаток: низкая помехоустойчивость, потому что при наложении помехи импульс вибрирует, следовательно, силовой ключ размывает скачок во времени, работа неэкономична.
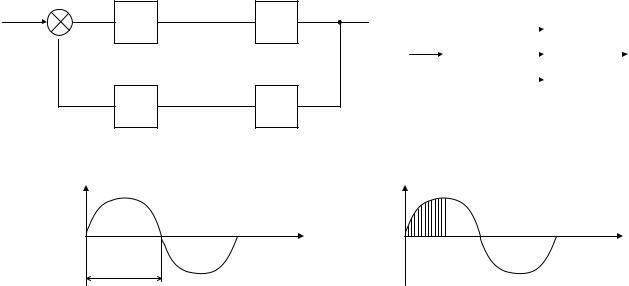
2 Интегральный способ (см. рисунки 1.56, 1.57) (сигма–дельта модуляция). Обладает высокой помехоустойчивостью, высокой точностью, широко используется в интегральных микросхемах, в аналогово–цифровых преобразователях с двойным интегрированием (до 15–16 разрядов).
В схеме, изображенной на рисунке 1.56, на вход интегратора поступает два напряжения: модулирующее Uс и напряжение обратной связи Uос., причем они противонаправлены. Компаратор согласует выход операционного усилителя с логикой. Соединять напрямую недопустимо, потому что у логики уровни в диапазоне 0 ÷ 5 В, а выход операционного усилителя выдает напряжение, например, –12 – +12 В, и сожжет логику.
61
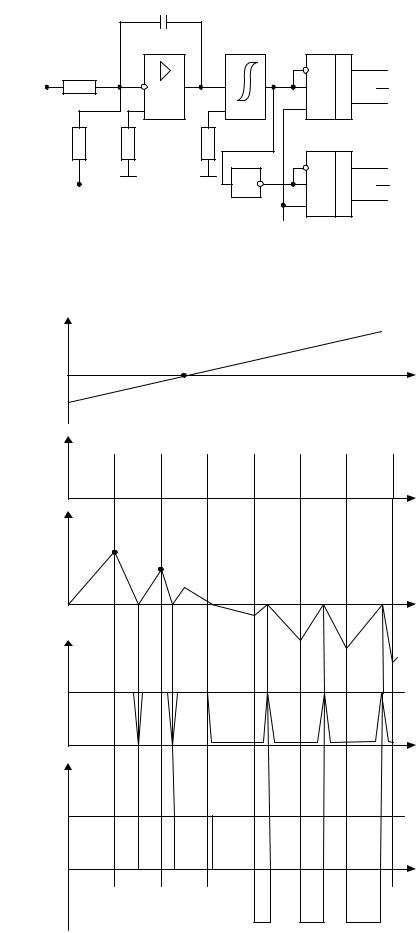
Рисунок 1.56 – Интегральная схема модулятора
Рисунок 1.57 – Интегральный способ
62

На вход поступает сигнал произвольной формы. На верхнем графике (см. рисунок 1.57) это прямая из “–” области в “+” область. На втором графике ШИМ тактовые импульсы с неизменной тактовой частотой. Из графика видно, что эти импульсы должны быть более частыми в сравнении с наибольшей частотой сигнала первого графика. Типичное соотношение теоремы Котельникова.
На третьем графике результат интегрирования разности на входе интегратора, образующейся вследствие вычитания сигналов верхнего и нижнего Uшим графиков.
На интервале времени от 0 до 1 на вход поступает только лишь сигнал первого графика в отрицательной области и так как вход инверсный у ОУ, то этот сигнал инвертируется и интегрируется в положительной области от нуля до точки А.
В момент 1 поступает тактовый импульс ШИМ на C входы обоих D-триггеров T1 и T2, одновременно на D входе и на R входе триггера T1 присутствует единица с выхода компаратора по четвертому графику (потому что на его выходе единица, начиная от начала координат и до момента 2, пока выходное напряжение интегратора положительно), следовательно, триггер Т1 перейдет в состояние “1”, Q1=1; Q1=0, через элемент задержки, гальваническую развязку, предмощный
каскад, не приведенные на схеме рисунка 1.56, включит силовой ключ “П” или “T”
– образной схем, на якоре двигателя появится импульсом выходное напряжение, показанное на пятом графике рисунка 1.57. Это напряжение через обратную связь подается на вход Uос интегратора, вычитается из входного Uc, поэтому на третьем графике, на интервале А-2 выход интегратора убывает до нуля, компарируется компаратором в отрицательный импульс, который посредством установочного R входа D-триггера T1 переключает последний в состояние нуля (Q1=0, Q1=1), в
итоге через схему управления силовой ключ “П” или “T” схемы выключается, импульс Uшим пятого графика заканчивается, поступает на вход только сигнал первого графика и т.д. Так продолжается до тех пор, пока напряжение входного сигнала Uc по первому графику находится в отрицательной области, при этом триггер Т2 не переключается, на его D-входе (а также R-входе) низкий уровень с выхода инвертора.
Для сигналов положительной области все аналогично, но ШИМ импульсы пятого графика в отрицательной области. Следовательно, для того, чтобы управлять тиристорами по методу ШИМ необходимо сформировать тактовые импульсы второго графика синхронно с частотой сети.
Один из способов представлен графически на рисунке 1.58. Суть его заключается в выделении полупериодов сетевого напряжения.
63
Uc
t
Uвых
выпр.
Uвых |
t |
огран.
Uтакт  t
t
t
Рисунок 1.58 – Выделение тактовых импульсов Схема, иллюстрирующая способ, изображена на рисунке 1.59.
2
1
Uсети
50 Гц
3
Рисунок 1.59 – Схема выделения импульсов, синхронных сетевому напряжению. 3 Цифровой способ (см. рисунок 1.60).
64
 (─)
(─)
вых
а)
|
|
ГТИ |
|
||
|
|
|
|
|
|
|
|
|
|
реверсивный счетчик |
|
регистр |
|
||||
|
|
|
|
||
|
|
|
|
||
|
|
|
|
||
|
|
|
|
|
|
|
|
f тактов |
|
||
|
|
|
|||
|
|
в) |
|
||
Uc |
Uc |
t |
t |
180°
б) |
г) |
Рисунок 1.60, а – Одна из систем произвольного вида; б – интервал полупериода; в – реверсивный счетчик; г – интервал ШИМ
На рисунке 1.60, а изображена одна из систем произвольного вида, у которой из входного сигнала, определяемого числом импульсов, вычитается сигнал обратной связи, выраженный тоже в виде числа импульсов. Поэтому,  является элементом сравнения. Это сумматор, действующий в режиме вычитания, с прямым двоичным кодом суммируется дополнительный код, т. е. инверсный с дополнением единицы. Примем, что интервал полупериода на рисунке 1.60, б, соответствующий 180°, также эквивалентен 180 импульсам. Это значит, что дискретная погрешность будет менее 1%. Следовательно, если разработчик принимает систему с 1% – ой погрешностью в статическом режиме, то входной сигнал, выраженный количеством импульсов, и сигнал ОС должны содержать не менее, чем в 100 раз большее количество импульсов в сравнении со 180 импульсами. Таким образом на выходе элемента сравнения схемы рисунка 1.60, а может быть любое число импульсов ε в пределах от нуля до 180°, зависящее от входной цифровой величины. Это число ε параллельным образом переносится в реверсивный счетчик схемы рисунка 1.60, в, затем на второй вход этого счетчика подаются тактовые импульсы от генератора тактовых импульсов (ГТИ), синхронные частоте сети (50 Гц). На третий вход поступает fтактов, частота которых выбрана такой, чтобы длительность сетевого полупериода соответствовала длительности принятых 180 импульсов. Конечный импульс обратного считывания реверсивного счетчика будет эквивалентен по времени импульсу ШИМ (рисунок 1.60, г). Недостаток цифрового способа – дискретность, особенно при малых уровнях ε.
является элементом сравнения. Это сумматор, действующий в режиме вычитания, с прямым двоичным кодом суммируется дополнительный код, т. е. инверсный с дополнением единицы. Примем, что интервал полупериода на рисунке 1.60, б, соответствующий 180°, также эквивалентен 180 импульсам. Это значит, что дискретная погрешность будет менее 1%. Следовательно, если разработчик принимает систему с 1% – ой погрешностью в статическом режиме, то входной сигнал, выраженный количеством импульсов, и сигнал ОС должны содержать не менее, чем в 100 раз большее количество импульсов в сравнении со 180 импульсами. Таким образом на выходе элемента сравнения схемы рисунка 1.60, а может быть любое число импульсов ε в пределах от нуля до 180°, зависящее от входной цифровой величины. Это число ε параллельным образом переносится в реверсивный счетчик схемы рисунка 1.60, в, затем на второй вход этого счетчика подаются тактовые импульсы от генератора тактовых импульсов (ГТИ), синхронные частоте сети (50 Гц). На третий вход поступает fтактов, частота которых выбрана такой, чтобы длительность сетевого полупериода соответствовала длительности принятых 180 импульсов. Конечный импульс обратного считывания реверсивного счетчика будет эквивалентен по времени импульсу ШИМ (рисунок 1.60, г). Недостаток цифрового способа – дискретность, особенно при малых уровнях ε.
65