

VD
R
Рисунок 1.44 – Транзистор Шоттки в интегральном исполнении
1.10Выходные ключевые каскады
Впрактике импульсного усиления наиболее часто применяют ШИМ (широтно-импульсную) – или ЧИМ (частотно-импульсную) –модуляцию, или их взаимные комбинации разных видов. Кроме них могут быть АИМ, КИМ, ВИМ, и т.д.
При ШИМ–модуляции частота следования импульсов неизменна, а импульс располагается между тактовыми импульсами и изменяется по ширине, причем может быть привязан к началу периода, к окончанию периода, к середине периода. В зависимости от этого выделяют ШИМ модуляцию 1, 2, 3-го родов.
Пусть сигнал имеет вид, изображенный на втором графике рисунка 1.45.
Тактовые
импульсы
T |
t |
Uc 
t
Uшим 
tu |
t |
|
Рисунок 1.45 – ШИМ–модуляция
Как видно из рисунка 1.45, по мере возрастания амплитуды модулирующего сигнала возрастает ширина импульсов. Наибольшая ширина обычно не
48
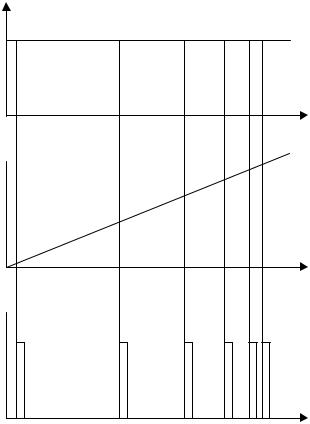
превышает 0.8Т, где Т – это период. Следовательно, если амплитуда сигнала второго графика рисунка 1.45 нарастает еще больше, а на третьем графике достигнут предел 0.8Т, то говорят, что достигнуто насыщение, линейной зависимости больше нет.
Этот способ модуляции называется несимметричным. Несимметричная модуляция в отличие от симметричной, когда интервалы пауз заполняются отрицательными импульсами на нагрузке. Возникает принципиальное различие: при несимметричной модуляции нуль тока в нагрузке соответствует наиболее коротким, нулевым импульсам, следовательно, необходим способ чтобы фиксировать якорь в момент остановки. При симметричном управлении нуль тока будет в случае длительности импульсов и пауз равными друг другу, поэтому можно обойтись без тормоза, так как положительный импульс дает вращение влево, а отрицательный – вправо, фиксируя нулевой ток по среднему значению. Якорь находится в режиме дрожания, если частота невелика. Имеется в виду, что есть ОС, фиксирующая нуль.
ЧИМ–модуляция заключается в том, что на нагрузку поступают импульсы с одинаковой длительностью, но интервал между импульсами изменяется (см. рисунок 1.46 ).
Тактовые
импульсы
t
Uc 
t
Uчим 
t
Рисунок 1.46 – ЧИМ–модуляция
Возможны взаимные комбинации разных методов модуляции.
49
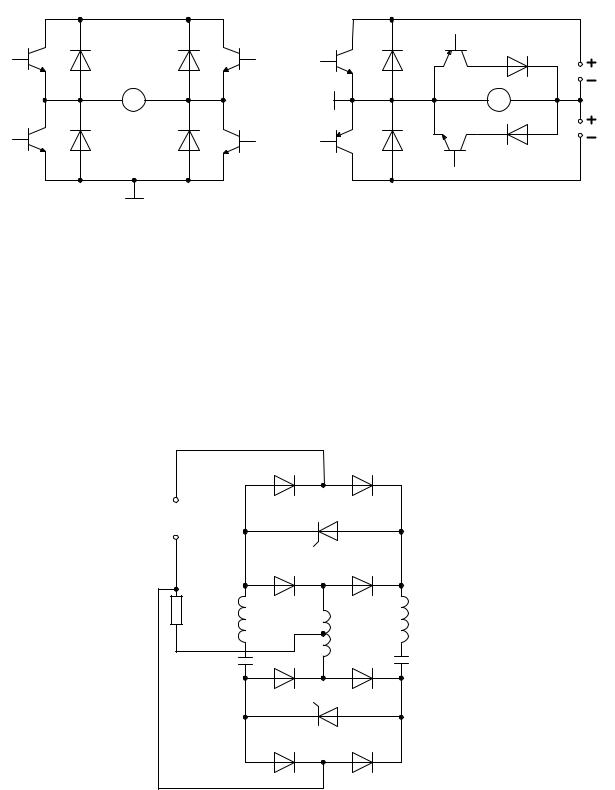
На рисунках 1.47, а, б изображены наиболее часто применяющиеся П и Т– образные схемы ключевых каскадов усиления мощности, где Я – якорь двигателя.
В зарубежной литературе схемы называются мостовыми.
 Рисунок 1.47, а – П–схема, б – Т–схема
Рисунок 1.47, а – П–схема, б – Т–схема
Обе схемы, изображенные на рисунке 1.47, содержат одинаковое количество транзисторов и диодов. Они могут быть выполнены на биполярных, униполярных транзисторах, MOSFET, IJBT, на тиристорах. Так как тиристоры, как правило, не закрываются по управляющему электроду, то вместо каждого ключа ставится, например, тиристорная схема, приведенная на рисунке 1.48.
~Uc |
VT1 |
Zн
C1
C2
VT2
Рисунок 1.48 – Тиристорная схема
50
Первая схема (см. рисунок 1.47, а) имеет один источник питания E0, во второй схеме – два точно таких же отдельных источника с той же величиной напряжения. В первой схеме все четыре ключа одинаковы, могут быть любой проводимости. Во второй схеме VT2, VT4, диоды VD2, VD4 такие же как и в первой схеме; транзисторы VT1, VT3, диоды VD1, VD3 – должны быть рассчитаны на двойное напряжение, по сравнению с первой схемой, так как когда, например, открыт VT1, а VT3 в это время закрыт, то к VT3 приложено
напряжение двух источников: E01 , E02 , включенных последовательно.
К недостаткам первой схемы следует отнести то, что ключами VT1, VT2, VT3, VT4 необходимо управлять отдельными гальванически развязанными цепями управления. В то время, как во второй схеме применены комплементарные пары, все эмиттерные электроды в одной точке на земле. Поэтому необходим один источник питания для всех четырех предмощных схем управления ключами. Это достоинство второй схемы в сравнении с первой, но можно также сделать ее на ключах одного типа проводимости. В этом случае потребуется гальваническая развязка и отдельные источники питания. Если вторая схема применятся для управления рукой робота, т.е. имеется несколько степеней свободы (несколько двигателей), то во второй схеме нельзя применить один источник питания для предмощных каскадов, управляющих Т-образными каскадами.
Физика процессов в схемах:
Наиболее часто применяют несимметричный способ управления, потому что размах амплитуды в 2 раза ниже на нагрузке, и пульсации в несколько раз меньше. При этом в несимметричном способе для одного направления вращения в режиме ШИМ взаимно противофазно переключаются VT1 – VT2, VT3
постоянно закрыт, VT4 – постоянно открыт, |
ток |
протекает по цепи: |
+ E0 открытый VT1 якорь открытый VT4 земля. |
После |
закрывания VT1 и |
открывания VT2, на интервале паузы для несимметричного закона управления, ток протекает по цепи той же величины, что протекал через VT1 в момент его закрывания, в соответствии с законом сохранения тока, под действием ЭДС самоиндукции в цепи якоря, слева направо через постоянно открытый VT4, открывшийся VT2 и параллельно с ним диод VD2, через якорь. Ток убывает по экспоненте, если производить описание процессов линейным ДУ первого порядка. Этот режим называется режимом сохранения тока на интервале паузы, или режимом непрерывного тока.
Для другого направления вращения: VT1 постоянно закрыт, VT2 – постоянно
открыт, |
|
ток |
протекает |
|
по |
|
цепи: |
+ E0 открытый вимпульсе VT3 якорь постоянно открытый VT2 земля. |
После |
||||||
закрытия |
VT3 |
и |
открытия |
VT4 |
ток |
течет |
по |
контуруякорь постоянно открытый VT2 открывшийcя VT4, диод VD4 якорь .
Если действует закон симметричного управления, то для нулевого тока в
цепи |
якоря, в цепях транзисторов |
токи следующих |
направлений: |
+ E0 открытый VT1 якорь открытый VT4 земля, при этом VT2, VT3 – закрыты. |
|||
Для |
следующего |
момента |
времени |
51