6. Порядок выполнения курсового проекта
По принципиальной схеме построить функциональную и структурную схему САУ частотой вращения ДПТ с независимым возбуждением.
По структурной схеме найти разомкнутую и замкнутую передаточные функции исходной САУ по управляющему и возмущающему воздействиям.
Проверить устойчивость САУ по алгебраическому критерию (любому на выбор), критерию Михайлова и Найквиста, логарифмическому критерию и определить запасы устойчивости по амплитуде и по фазе.
Произвести синтез САУ с помощью последовательной коррекции методом ЛАЧХ.
Построить график переходного процесса и определить основные показатели качества процесса регулирования.
Методические указания
Введение
Основное внимание уделить перспективам развития автоматики, проникновению автоматики в разные отрасли техники, обогащение последней за счет новых достижений и более глубокого принципа адаптации.
1.4 Выбор электродвигателя для привода станка
Мощность электродвигателя главного привода станка может быть определена аналитически и экспериментально.
Для определения мощности электродвигателя аналитическим способом должно быть известно качество обработки материала, материал и свойства резца, глубина резания подачи. Необходимо также знать и скорость резания.
Мощность
электродвигателя привода
 определяется по формуле:
определяется по формуле:

где
 – мощность резания, кВт
– мощность резания, кВт
 –коэффициент
полезного действия станка
–коэффициент
полезного действия станка
(Для токарных станков КПД равен 0,9; для фрезерных - 0,85; для сверлильных - 0,8)
Для резания на
заданных станках необходимо, чтобы
мощность электродвигателя станка
 была на 25%
больше расчетной мощности, т.е.
была на 25%
больше расчетной мощности, т.е.

По полученным данным выбираем электродвигатель. (марка электродвигателя)
Данные выбранного электродвигателя привести в таблице
Таблица 1 - Исходные данные для курсового проекта
|
Исходные данные |
Обозначение |
Единицы измерения |
Значение |
|
Двигатель постоянного тока | |||
|
Марка электродвигателя |
| ||
|
Номинальная мощность |
Pном |
кВт |
|
|
Номинальное напряжение |
Uном |
В |
|
|
Номинальная частота вращения |
nном |
об/мин |
|
|
КПД |
|
% |
|
|
Сопротивление якорной цепи |
Rя |
Ом |
|
|
Индуктивность якорной цепи |
Lя |
мГн |
|
|
Момент инерции |
|
кг/м2 |
|
|
Тиристорный преобразователь | |||
|
Коэффициент усиления |
Ктn |
|
|
|
Постоянная времени |
Ттп |
с |
|
|
Тахогенератор | |||
|
Коэффициент усиления |
Ктг |
В/мин-1 |
|
|
Режимы работы САУ | |||
|
Время переходного процесса |
tпп |
с |
Не более 2 |
|
Величина перерегулирования |
|
% |
Не более 20 |
|
Колебательность переходного процесса |
N |
|
Не более 2 |



Находим расчетные параметры для двигателя постоянного тока.
Электромагнитная
постоянная времени якорной цепи
 ,
с, находится по формуле:
,
с, находится по формуле:

где Lя – индуктивность якорной цепи двигателя; Гн;
Rя –сопротивление якорной цепи двигателя, Ом.
Находим номинальный ток двигателя Iном, А по формуле:

где Рном – номинальная мощность двигателя, Вт;
дв – коэффициент полезного действия двигателя
Угловую частоту вращения ωном, ,с-1, определяем по формуле:

где nном – номинальная скорость вращения, об/мин.
Находим конструктивную постоянную двигателя Сд, по формуле:

где Uном – номинальное напряжение, В;
Iном – номинальный ток двигателя, А;
ωном – угловая частота вращения, с-1.
Электромеханическая постоянная времени Тм, с., определяется по формуле:

где Сд – конструктивная постоянная двигателя;
J – момент инерции приведенный к валу двигателя, кг/м2.
(При расчете формул необходимо перевести кВт в Вт, мГн в Гн, КПД брать от 0 до 1)
Построение функциональных и структурных схем исследуемой системы автоматического управления.
Функциональная электрическая схема системы регулирования частоты вращения ДПТ приведена на рисунке 1:
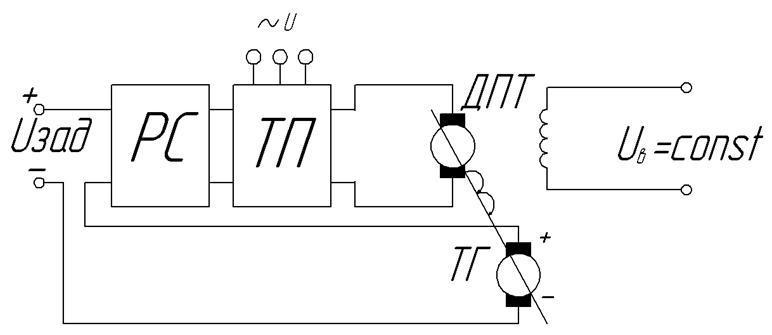
ДПТ - двигатель постоянного тока
ТП - тиристорный преобразователь
ТГ - тахогенератор
РС - регулятор скорости
Рисунок 1 - Функциональная электрическая схема системы регулирования частоты вращения ДПТ
Построим функциональную схему исследуемой системы автоматического управления, то есть разобьем систему на составляющие её элементы, исходя из выполняемых или функций с указанием связи между ними.
Функциональная схема приведена на рисунке 2.
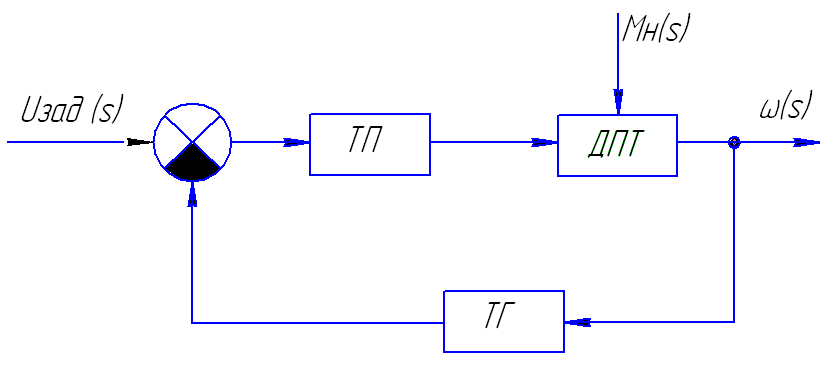
Uзад (s) - задающее напряжение
Мн (s) - момент нагрузки внешнего воздействия
ω (s) - угловая частота вращения
Рисунок 2 - Функциональная схема исследуемой системы автоматического управления.
По функциональной схеме, подставляя в неё конкретные функции, составляющих её звеньев, составляем обобщающую структурную схему исследуемой САУ.
Структурные схемы тиристорного преобразователя, тахогенератора и двигателя постоянного тока приведены на рисунках 3,4,5.
Рисунок 3 - Структурная схема тиристорного преобразователя
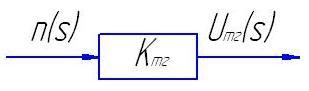
Рисунок 4 - Структурная схема тахогенератора.
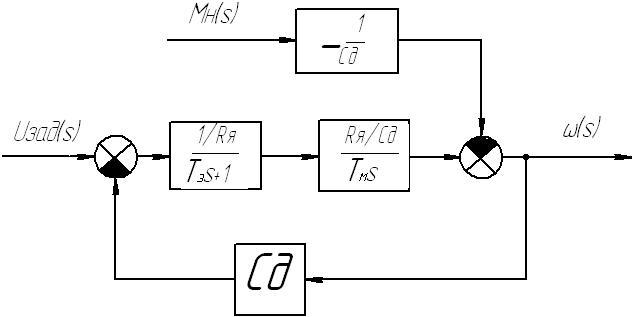
Рисунок 5 - Структурная схема двигателя постоянного тока
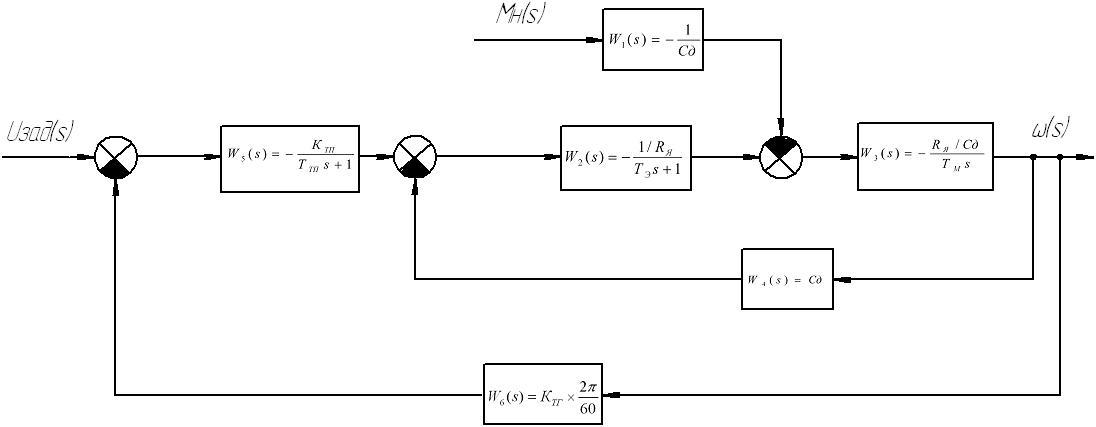
Рисунок 6 - Обобщающая структурная схема исследуемой САУ
Определим передаточные функции исследуемой САУ:
 - передаточные
функции двигателя постоянного тока.
- передаточные
функции двигателя постоянного тока.
 - передаточная
функция тиристорного преобразователя.
- передаточная
функция тиристорного преобразователя.
 - передаточная
функция тахогенератора.
- передаточная
функция тахогенератора.