

3.2. Уравнение движения ротора синхронной машины
В наиболее общем виде уравнение движения ротора синхронной машины будет представляться в соответствии со вторым законом Ньютона в следующем виде
![]() ,
(3.1)
,
(3.1)
где J– момент инерции ротора агрегата: турбины и генератора; ω – угловая скорость вращения ротора генератора, которая может рассматриваться как сумма синхронной угловой скорости вращения ротора ω0 и скорости перемещения ротора относительно синхронно вращающейся оси Δω, т. е. ω = ωо + Δω; Mт – момент, создаваемый турбиной, который имеет вращательный характер; М– электромагнитный момент на валу ротора генератора, несущий тормозящий характер.
Переходный процесс в соответствии с данным выражением можно характеризовать отклонениями координат Δω, ΔMт, ΔM от их нормальных установившихся значений: ω0, Mто, Mо. Для системы, содержащей n число синхронных машин, таких уравнений (3.1) также будет n.
В нормальном установившемся режиме угловая скорость ω = ωо = const, а также Mт = Mо . Для отклонений координат Δω , ΔMт , ΔM, т. е. для анализа переходного процесса, уравнение движения ротора (3.1) сохраняет свою структуру и принимает следующий вид
![]() (3.2)
(3.2)
или сокращенно:
![]() .
(3.3)
.
(3.3)
В неподвижной системе координат положение ротора синхронной машины в каждый момент времени можно характеризовать некоторым положением угла γ, который отсчитывается между поперечной осью синхронной машины q и магнитной осью статорной обмотки фазы А: γ = (q^А). И
 (3.4)
(3.4)
Здесь угол δ
отсчитывается от оси, которая вращается
с постоянной угловой скоростью исходного
установившегося режима ωо
и называется синхронно вращающейся
осью. Обычно также угол δ называют еще
абсолютным углом. Разность этих абсолютных
углов для любой пары синхронных машин
образует относительные или взаимные
углы:
![]() .
Поскольку
.
Поскольку
![]() (3.5)
(3.5)
или
![]() ,
(3.6)
,
(3.6)
то вторая производная
![]() .
(3.7)
.
(3.7)
Тогда с учетом соотношений (3.6) и (3.7) уравнение (3.3) может быть переписано:
 .
(3.8)
.
(3.8)
Преобразуем (3.8),
для чего разделим левую и правую части
на отношение
![]() ,
тогда
,
тогда
 .
(3.9)
.
(3.9)
Левую часть (3.9)
умножим на
![]() и разделим на
и разделим на![]() :
:
 .
(3.10)
.
(3.10)
Здесь
![]() ,
где подTJпонимается
постоянная инерции ротора генератора,
которая имеет размерность времени в
секундах. И тогда с учетом этого
обозначения (3.10) перепишем:
,
где подTJпонимается
постоянная инерции ротора генератора,
которая имеет размерность времени в
секундах. И тогда с учетом этого
обозначения (3.10) перепишем:
![]() .
(3.11)
.
(3.11)
Далее перейдем от моментов к мощностям:
 .
(3.12)
.
(3.12)
Тогда с учетом (3.12) уравнение (3.11) перепишем следующим образом
![]() .
(3.13)
.
(3.13)
Это есть не что
иное, как полное уравнение движения
ротора. Как видно из данного выражения,
правая часть уравнения представляет
собой безразмерную величину, и поэтому,
чтобы получить такую же безразмерную
величину в левой части, необходимо
подставить в левую часть (3.13): синхронную
угловую скорость ωо
,![]() ; Δδ,
; Δδ,![]() ;t,
;t,![]() ;ТЈ
,
;ТЈ
,![]() .
Тогда в левой части также будет получаться
безразмерная величина. Можно переписать
уравнение (3.13) при применении системы
относительных единиц для всех величин,
входящих в это уравнение. В такой системе
базисными величинами дополнительно
принимают угол в один радиан и синхронную
угловую скорость ωо.
В этом случае единица времени, принимаемая
за базисное время (tбаз),
будет определяться как промежуток
времени в секундах, в течение которого
при синхронной угловой скорости вращения
ротора ωо
будет
достигаться изменение угла, равное
одному радиану. Тогда
.
Тогда в левой части также будет получаться
безразмерная величина. Можно переписать
уравнение (3.13) при применении системы
относительных единиц для всех величин,
входящих в это уравнение. В такой системе
базисными величинами дополнительно
принимают угол в один радиан и синхронную
угловую скорость ωо.
В этом случае единица времени, принимаемая
за базисное время (tбаз),
будет определяться как промежуток
времени в секундах, в течение которого
при синхронной угловой скорости вращения
ротора ωо
будет
достигаться изменение угла, равное
одному радиану. Тогда
![]() ,
,
где синхронная
скорость вращения![]() рад/с.
рад/с.
И тогда время, выраженное в относительных единицах или, как иногда говорят, в радианах, будет определяться как
![]() .
(3.14)
.
(3.14)
Если применить (3.14) ко времени t и постоянной инерции ТЈ в выражении (3.13), тогда последнее перепишется следующим образом
 .
(3.15)
.
(3.15)
Если допустить Δω* = 0, то получим приближенное уравнение движения ротора синхронной машины:
![]() .
(3.16)
.
(3.16)
Следует отметить, что применение этого приближенного уравнения движения ротора не вносит неприемлемых погрешностей в результат расчета синхронной динамической устойчивости. Это объясняется тем, что в действительности размах синхронных динамических качаний Δδ = (100–120)° при длительности качаний T = (0,5–0,8) с (рис. 3.4).
В этих условиях
Δω = 200
![]() что, отнесенное к ωном,
составит
что, отнесенное к ωном,
составит
![]() .
.
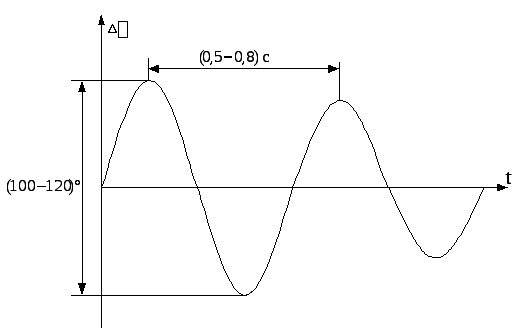
Рис. 3.4. Изменение угла во времени и определение
размаха колебаний и периода качаний
Таким образом, отсюда видно, что скорость перемещения ротора Δω относительно синхронно вращающейся оси, выраженная в относительных единицах, будет немного превышать один процент, что с полным основани-
ем доказывает, что этим можно пренебречь при выполнении приближенных упрощенных расчетов динамической устойчивости. При выполнении же расчетов длительных переходных процессов, таких как синхронизация генераторов, этим допущением Δω = 0 пользоваться не следует, и тогда анализ процесса синхронизации следует проводить по полному уравнению движения ротора синхронной машины, т. е. уравнению (3.13).
Постоянная ТЈ, входящая в уравнение движения ротора, представляет собой физически промежуток времени, в течение которого ротор генератора изменит свою скорость вращения от состояния покоя до синхронной угловой скорости вращения ωо при постоянном вращающем моменте, подведенном к валу ротора генератора, равном номинальному. И наоборот, постоянная инерции ТЈ равна промежутку времени, необходимому для полного останова ротора от синхронной угловой скорости ωо при постоянном тормозящем моменте, подведенном к валу ротора генератора, равном номинальному. Эта постоянная инерции ТЈ в секундах обычно задается в паспортных (каталожных) данных генератора или ее можно определить по эмпирическим формулам следующего вида:
– в паспортных данных задан маховый момент, т. е. GD2:
![]() ,
,
где
GD2
− произведение веса на диаметр ротора,
т![]() м2;
n
– частота вращения ротора, об/мин; Sном
− номинальная
мощность генератора,
МВ·А;
м2;
n
– частота вращения ротора, об/мин; Sном
− номинальная
мощность генератора,
МВ·А;
– указан момент
инерции J,
т![]() м2:
м2:
![]() .
.
Для большинства серийно выпускаемых генераторов ТЈ = 5−10 с.