

3.4. Энергетические соотношения, характеризующие движение ротора генератора
В некоторых случаях характер относительного движения ротора генератора можно установить без решения дифференциальных уравнений движения ротора, т. е. без нахождения зависимости δ = f(t), а из рассмотрения изменения механической энергии ротора, применяя при этом так называемый способ площадей. При изменении параметров системы, на которую работает генератор, изменяется электромагнитный момент генератора и электрическая мощность, отдаваемая генератором, т. е. изменяются его характеристики М≡Р=φ(δ). Пример такого изменения покажем на рис. 3.6.
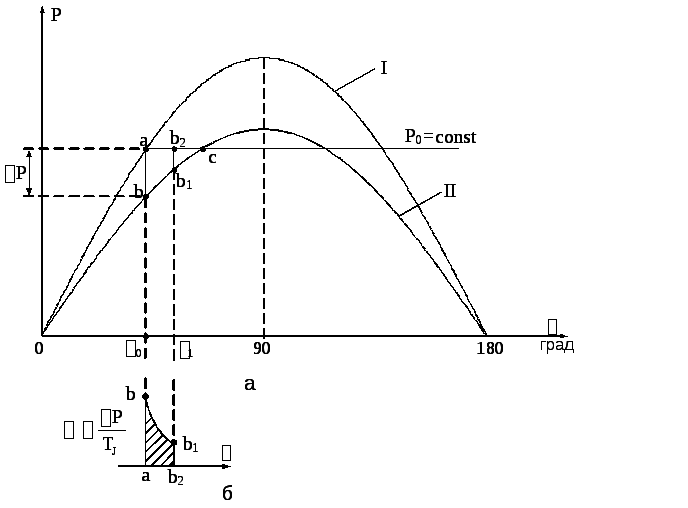 Рис.
3.6. Изменения характеристикиР = f(δ)
и запасенной энергии:
Рис.
3.6. Изменения характеристикиР = f(δ)
и запасенной энергии:
а –изменение запаса энергии ( при изменении угла от δ0до δ1);
б – изменение ускорения α
На рис. 3.6 кривая I − характеристика нормального установившегося
режима. Кривая II − это характеристика после отключения одной из цепей
двухцепной линии. Изменение электрической мощности при угле δо с кривой I на кривую II приведет к появлению небаланса мощности ΔР. Под действием этого небаланса мощности, т.е. разности механической и электрической мощностей генератора, происходит относительное перемещение ротора генератора в сторону увеличения угла δ от точки b к точке b1. При этом величина ΔР будет непостоянна и зависеть от положения ротора в пространстве, т. е. от значения угла δ. Вначале будем считать, что движение ротора будет происходить под действием сил (вращающих моментов), которые зависят только лишь от положения ротора в пространстве. И тогда такая система будет считаться как позиционная система. Хотя в действительности на движение ротора влияют и другие факторы, например, изменение скорости вращения. Из курса теоретической механики известно, что при движении некоторой материальной точки х под действием силы, зависящей от положения этой точки, работа будет определяться как приращение энергии (кинетической) на пройденном пути. Так, при движении с начальной нулевой скоростью можно записать
 .
(3.17)
.
(3.17)
Величина работы А на графике F= φ(х) будет представляться площадью,
пропорциональной кинетической энергии, запасенной движущимся те-
лом при изменении скорости (рис. 3.7).
Рис. 3.7. К определению скорости Vи кинетической энергии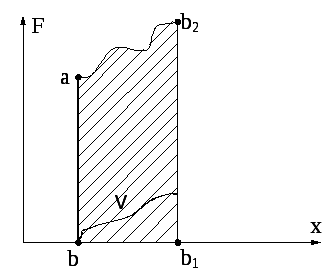
Переходя к соотношениям, отвечающим электроэнергетической системе (рис. 3.6), и рассматривая изменение скорости по отношению к неизменной скорости ω0 , по аналогии с выражением (3.17) запишем
 .
(3.18)
.
(3.18)
Таким образом, при сделанных допущениях изменение кинетической энергии при перемещении ротора от угла δ0 до угла δ1 в соответствии с принятыми обозначениями на рис. 3.6 можно записать:
 .
(3.19)
.
(3.19)
Графически величина
работы (рис. 3.6) определяется площадью
abb1b2a.
Рассчитывая изменение режима ЭЭС при
переходе с характеристики I
на характеристику II,
получаем изменение электромагнитного
момента на валу каждого генератора от
значения Р0I
= Pт
до
значения Р0II
< Pт,
и тогда появившийся небаланс между
мощностями (моментами) турбины и
генератора приводит к тому, что последний
начинает изменять свою скорость в
сторону увеличения сверх синхронной
на величину Δω. Избыточный момент ΔМ
при этом будет уравновешиваться не
только электромагнитным моментом,
который соответствует отдаваемой
генератором электроэнергии в сеть, но
и моментом, отвечающим накапливаемой
ротором генератора кинетической энергии.
Интегрируя уравнение движения ротора,
можно определить изменение относительной
скорости Δω во времени и, учитывая,
что![]() ,
можно найти в результате дальнейшего
интегрирования зависимость δ = φ(t).
,
можно найти в результате дальнейшего
интегрирования зависимость δ = φ(t).
Изменение скорости Δω и угла Δδ во времени позволяют судить о том, сохранит ли рассмотренная система синхронную работу, т.е. будет ли она динамически устойчива после резкого возмущения режима и перехода от одного режима к другому. Интегрирование уравнения движения ротора представляет собой значительные трудности, и в большинстве случаев удается провести, применяя только лишь приближенные методы. В некоторых же случаях динамическую устойчивость можно проверить грубо, без выявления характеристик движения ротора во времени, а из соотношения возможных изменений энергии в разные фазы движения. Этот способ получил название способа площадей.