

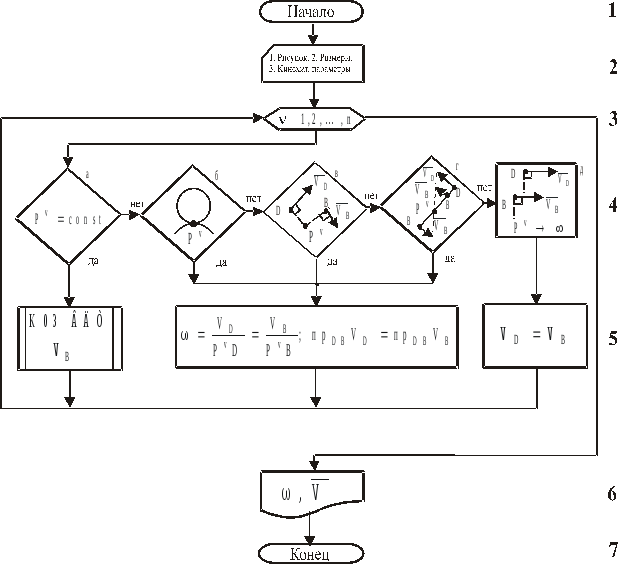
4.12. Алгоритм решения задач кинематики
плоскопараллельного движения НМС по определению угловой скорости и скоростей точек плоской фигуры – схема алгоритма К04 ПДС
С комментариями и примерами
Комментарии
К.2 Изображается механизм в положении, соответствующем рассматриваемому моменту времени.
Разбивается механизм на n движущихся звеньев, которые нумеруются ( = 1,2,…,n).
Выделяются общие точки звеньев, в которых происходит передача движения.
Начинается решение задачи со звена, какие-либо кинематические параметры движения которого заданы.
Решается задача путем перехода от кинематических параметров одного звена к кинематическим параметрам другого через нахождение скоростей общих точек.
К.4 Находится положение мгновенного центра скоростей для каждого звена, если скорости точек плоской фигуры определяются с помощью мгновенного центра скоростей. Для компактности в уровнях 4 и 5 схемы алгоритма индекс опущен.
Используются следующие обозначения:
a)
![]() - постоянный центр скоростей, т.е.
вращательное движение вокруг неподвижного
центра;
- постоянный центр скоростей, т.е.
вращательное движение вокруг неподвижного
центра;
б),в),г) Pv const - мгновенный центр скоростей, указаны способы его нахождения;
д) Pv - мгновенный центр скоростей находится в бесконечности, что соответствует мгновенному или просто поступательному движению.
Используются при определении положения мгновенного центра скоростей точек плоских фигур, направления скоростей которых известны (таблица 4).
К.5 Составляется для двух точек, скорость одной из которых известна, пропорция в случае использования мгновенного центра скоростей или соотношение из теоремы о проекциях скоростей точек плоской фигуры.
Определяется, если необходимо, угловая скорость звена, как угловая скорость плоской фигуры относительно мгновенного центра скоростей.
Вместо расстояний PvD и PvB часто бывает достаточно определить их отношение из геометрических построений.
Применяется теорема о проекциях скоростей точек плоской фигуры в основном в тех случаях, когда заданы или можно определить углы между скоростями и элементами механизма.
К.5.6 Изображаются на рисунке скорости всех необходимых точек звеньев и мгновенные центры скоростей.
Таблица 4
Типы точек плоской фигуры, направления скоростей
и ускорений которых известны
|
Тип П Прямолинейное движение точки |
Тип К Криволинейное движение точки |
|
|
|
|
Тип С Сложное движение точки (глава 7) | |
|
-
ускорение Кориолиса. | |









Пример 1
2 Колесо радиуса катится по поверхности:
без проскальзывания и пробуксовки (рис. 37);
с проскальзыванием (рис. 38);
с пробуксовкой (рис. 39).
Скорость центра колеса VC в рассматриваемый момент времени известна.
Найти во всех трех случаях угловую скорость колеса и скорости точек колеса В и E, если в последних двух случаях скорость точки касания колеса о неподвижную поверхность VD в этот момент времени известна.
3 n=1. Первый случай, рис. 37.
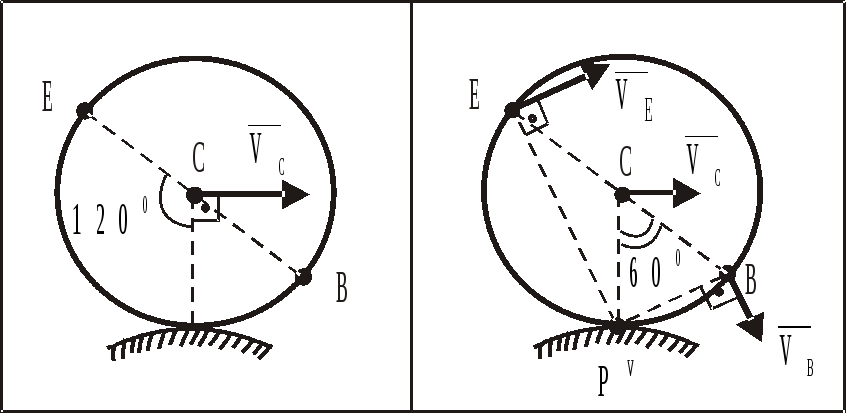
Рис. 37
4 Pconst, ветвь "б".
5 ![]() ,
,
здесь
PvB
= PvC
= ,
PvE=2
sin60o=![]() .
.
6
Ответ:
![]()
Второй случай, рис. 38.
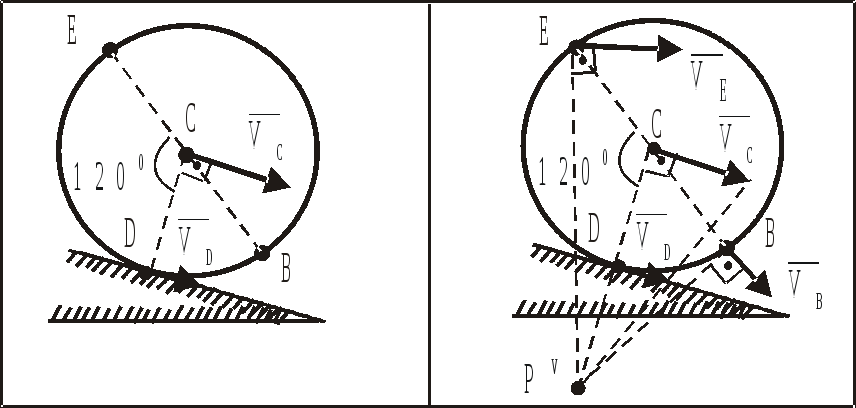
Рис. 38
4 Pconst, ветвь "г", если VD VC (пусть VD < VC).
5 ![]() .
.
Сначала находится PvD=x - отрезок, определяющий положение мгновенного центра скоростей Рv.
Так как VC и VD известны и PvC=x+, то
![]() .
.
Угловая скорость колеса определяется из соотношения 5, после подстановки х:
![]() .
.
Скорости точек В и E определяются из соотношения 5:
![]() .
.
Отрезки РvE и PvB определяются по теореме косинусов:
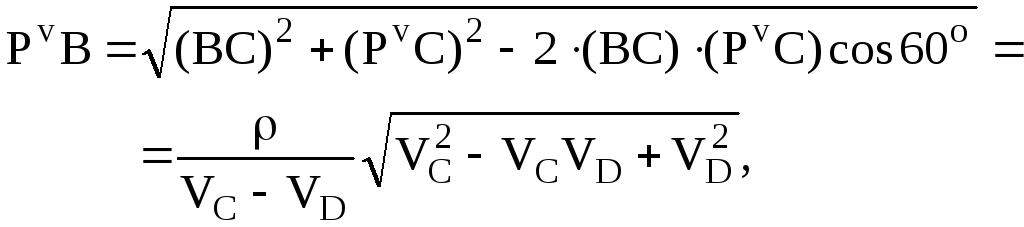
![]()
![]()

![]()
6
Ответ:
![]() ,
,
![]()
![]()
4 Если VC=VD, то Pv, ветвь "д".
5 Мгновенное поступательное движение, рис. 38 примет вид:
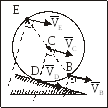
Рис. 39
6 Ответ:
![]() .
.
Третий случай, рис. 40.
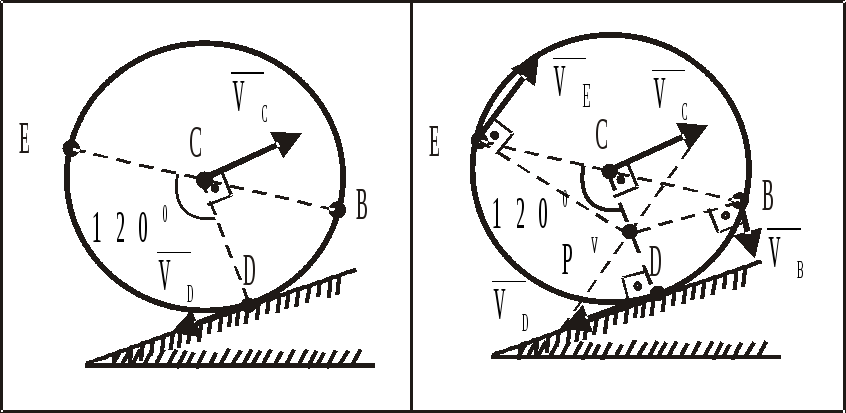
Рис. 40
4 Pvconst, ветвь "г".
5 ![]() .
.
Сначала
находится
![]() – отрезок, определяющий положение
мгновенного центра скоростей Рv.
– отрезок, определяющий положение
мгновенного центра скоростей Рv.
Так
как VC
и VD
известны и
![]() ,
то
,
то
![]() .
.
Угловая скорость колеса определяется из соотношения 5, после подстановки х:
![]() .
.
Скорости точек Е и В определяются из соотношения 5:
![]() .
.
Отрезки РvE и PvB определяются по теореме косинусов:
![]()
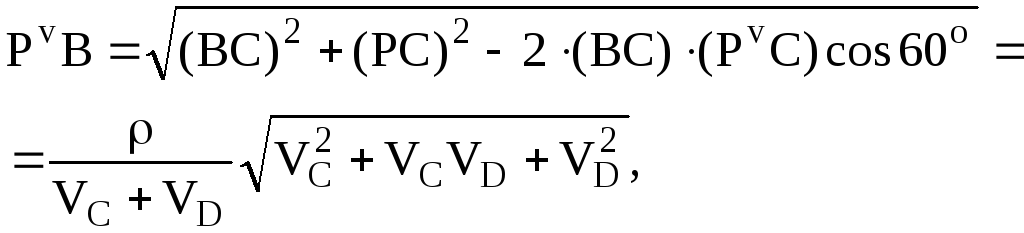
![]()
![]()
6 Ответ:
![]() ,
,![]()
![]()