

Пример 2
2 Прямолинейный отрезок BЕ длиной совершает плоско-параллельное движение. Скорость VE в рассматриваемый момент времени известна.
Найти скорость точки В и угловую скорость стержня в этот момент времени для трех случаев, изображенных на рис. 41, рис. 42, рис. 43.
3 n=1.
4 Pvconst, ветвь "в".
В первом и третьем случаях известны по направлению скорости точек В и Е, во втором случае скорости точек Е и D.
5
![]() или
или![]() .
.
Первый случай, рис. 41.
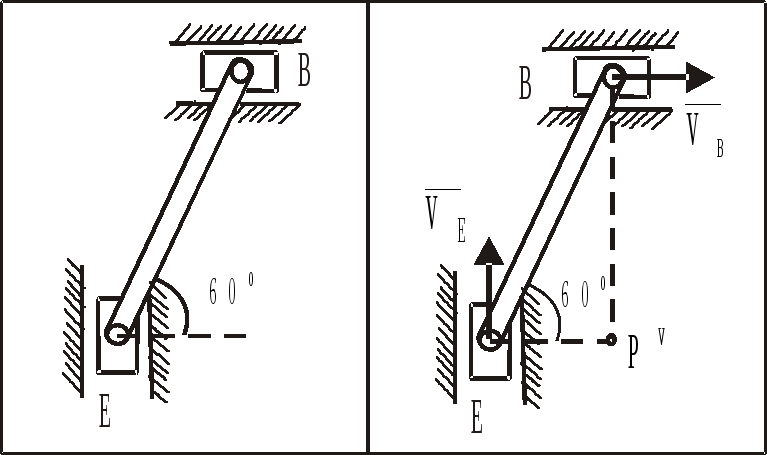
Рис. 41
6
Так как
![]() ,
то
,
то
![]()
или
![]() .
.
Второй случай, рис. 42.
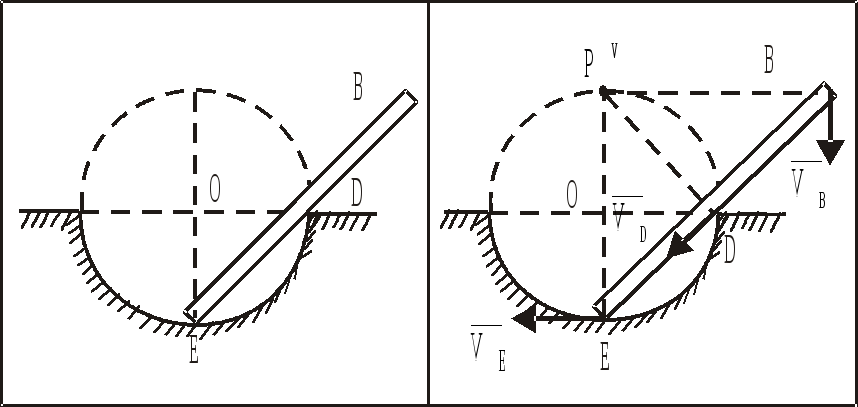
Рис. 42
6
Так
как
![]() ,
то
,
то
![]()
или
![]() .
.
Третий случай, рис. 43.
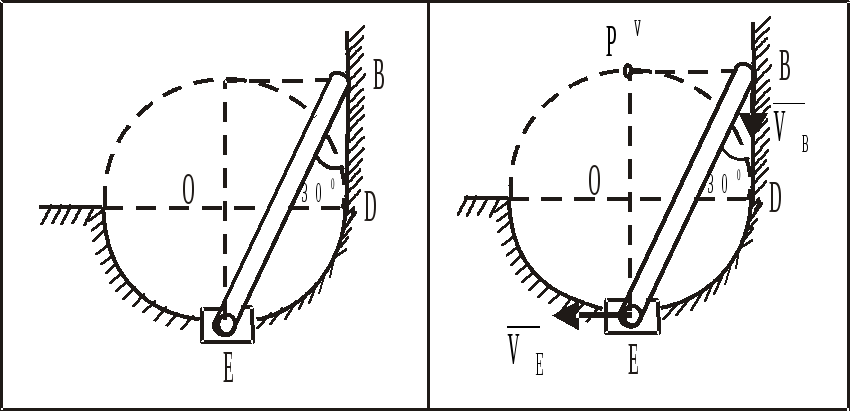
Рис. 43
6
Так как
![]() ,
то
,
то

или
![]() .
.
Пример 3
2
В механизме, изображенном на рис. 44,
угловая скорость кривошипа
![]() .
.
Найти угловые скорости всех звеньев и скорость ползуна D в рассматриваемый момент времени, если все необходимые размеры известны (они будут даны после введения обозначений).
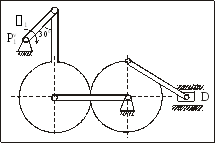
Рис. 44
3 Механизм разбивается на движущиеся звенья, и они нумеруются в порядке передачи движения от звена к звену (рис. 45), n=5.
Общие точки звеньев обозначаются соответствующими номерами (в этих точках передается движение):
B12,
B23,
B24,
B45
(рис. 45),
![]() см,
см,
B12B23=100![]() см.
см.
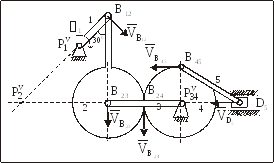
Рис. 45
=1
4
![]() ,
ветвь "а".
,
ветвь "а".
5


![]() ,
,![]() (рис.
45).
(рис.
45).
![]()
=2
4
![]() ,
ветвь "в".
,
ветвь "в".
Во втором звене, кроме направления
скорости ![]() известно направление скорости
известно направление скорости ![]() :
:
![]() (рис. 45).
(рис. 45).
5 а) Используя мгновенный центр скоростей:
![]() ,
где
,
где

Из пропорции получим:
![]()
![]() .
.
б) Используя теорему о проекциях скоростей точек плоской фигуры:
![]() ,
,
![]() это выражение неудобно для нахождения
это выражение неудобно для нахождения
![]() ,
так как необходимо предварительно
определить углы для определения проекций.
,
так как необходимо предварительно
определить углы для определения проекций.
=3
![]() .
.![]() =const,
ветвь "а".
=const,
ветвь "а".
5
 К03 BДТ
К03 BДТ
3
=4
4
![]() =const,
ветвь "а".
=const,
ветвь "а".
![]() ,
,![]() (рис. 45).
(рис. 45).
 К03 BДТ
К03 BДТ
4,![]()
=5
4
![]() ,
ветвь "д".
,
ветвь "д".
5
![]() ,5=0
(мгновенное поступательное движение),
,5=0
(мгновенное поступательное движение),
![]() .
.
6
Ответ: 2=0,2c-1,
3=0,5c-1,
4=1,2c-1,
5=0,
![]() =24,0
=24,0![]() .
.
Пример 4
2
В механизме, изображенном на рис. 46,
угловая скорость кривошипа
![]() .
.
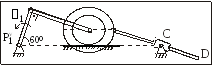
Рис. 46
Найти угловые скорости всех звеньев
и скорость
![]() в рассматриваемый момент времени, если
все необходимые размеры известны (они
будут даны после введения обозначений).
в рассматриваемый момент времени, если
все необходимые размеры известны (они
будут даны после введения обозначений).
3 Механизм разбивается на движущиеся звенья и они нумеруются в порядке передачи движения от звена к звену (рис. 47), n=4.
Общие точек звеньев обозначаются соответствующими номерами (в этих точках передается движение):
B12,
B23,
B34,
кроме того, известны:
![]() B12=23=40
B12=23=40![]() см,'3=20
см, B34C4=D4
C4=40
см.
см,'3=20
см, B34C4=D4
C4=40
см.
=1
4
![]()
![]() (рис.
47).
(рис.
47).![]() =const,
ветвь "а".
=const,
ветвь "а".
5
 К03 ВДТ
К03 ВДТ
![]()
=2
4 ![]() const,
ветвь "в".
const,
ветвь "в".
Во
втором звене, кроме направления скорости
![]() ,
известно направление скорости
,
известно направление скорости ![]() :
:
![]() (рис. 47).
(рис. 47).

Рис. 47
5 а) Используя мгновенный центр скоростей:
![]() ,
где
,
где![]()
![]() .
.
Из пропорции получим:
![]() .
.
б) Используя теорему о проекциях скоростей точек плоской фигуры:

=3
4 ![]() const,
случай "б".
const,
случай "б".
5 ![]() ,
где
,
где .
.
Из пропорции получим:
![]()
![]() (рис.
47).
(рис.
47).
=4
4 ![]() const,
случай "в".
const,
случай "в".
В
четвертом звене, кроме направления
скорости ![]() ,
известно направление скорости
,
известно направление скорости ![]() —
вдоль звена 4 (рис. 47).
—
вдоль звена 4 (рис. 47).
5 ![]() ,
где
,
где![]()
(![]() ),
),
![]()
(так
как![]() ),
),
![]() — равносторонний, т.е.
— равносторонний, т.е.
![]() .
.
Из пропорции получим:
![]()
6 Ответ: 2=1c-1, 3=8c-1, 4=4c-1, VD4=320 cм/c.