

Лекция № 9
9.1 Расчет модуля жесткости рабочей клети
Упругая деформация рабочей клети, от которой зависит точность прокатки, характеризуется модулем жесткости клети:
![]() ,
МН/мм
,
МН/мм
где δΣ – сумма упругих деформаций элементов клети под действием силы Р, мм:
![]() ,
,
где δвк – деформация валкового комплекта;
δвк – деформация подшипников;
δвк – деформация подушек;
δвк – деформация подпятников;
δвк – деформация нажимных винтов;
δвк – деформация нажимных гаек;
δвк – деформация станин;
δвк – деформация прочих элементов клети (прокладок, месдоз и т.д).
Вклад этих составляющих в общую деформацию клети не одинаков. По рис.9.1видно примерно половина деформации клети приходится на валковую систему. Доля изгиба и сплющивания зависит от конструкции валковой системы. Станины и винтовая пара нажимного устройства дают по примерно 15% деформации. Следовательно, для увеличения жесткости клети нужно прежде всего уменьшать деформацию валковой системы δвк.
Деформация валковой системы определяется как:
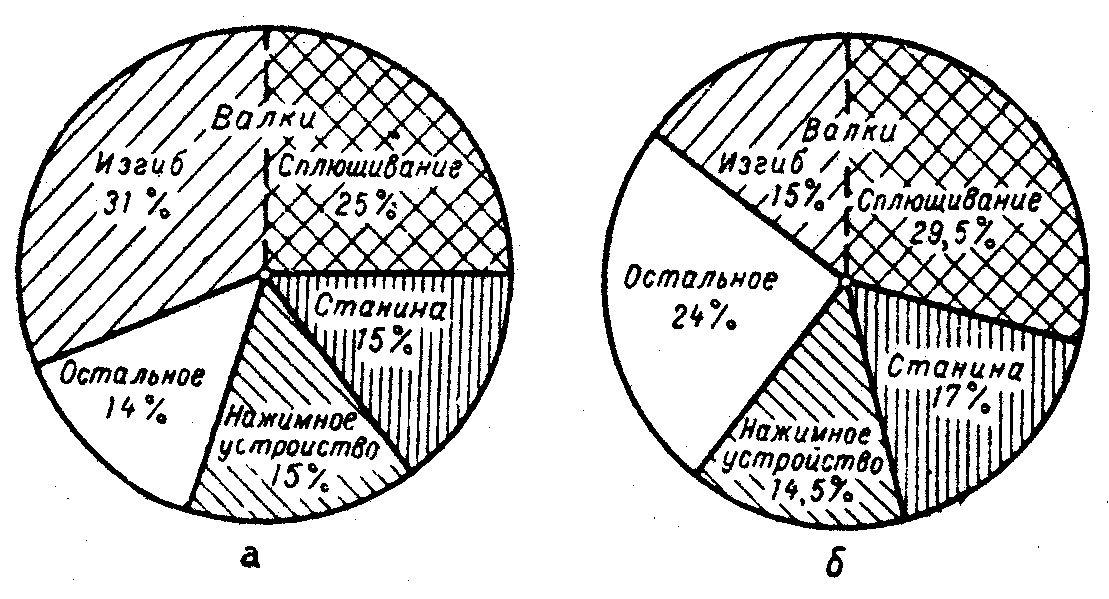
Рисунок 9.1 – Распределение общей деформации клети по
ее элементам
![]()
где fa – стрела прогиба опорных валков по осям нажимных винтов;
ΔLб – неравномерная составляющая сближения осей рабочего и опорного валка. Если клеть дуо, то ΔLб = 0.
Деформацию подшипников качения будем определять по методике, которая приведена в справочнике [2](Л.Перель. "Подшипники качения"):
![]()
где
![]() -
радиальная податливость в контакте
наиболее нагруженного тела качения с
дорожкой качения;
-
радиальная податливость в контакте
наиболее нагруженного тела качения с
дорожкой качения;
![]() -
тоже в контакте колец подшипника с
посадочными поверхностями вала и
корпуса.
-
тоже в контакте колец подшипника с
посадочными поверхностями вала и
корпуса.
Первая составляющая при посадке с натягом:
![]()
где β - коэффициент, который учитывает величину натяга или зазора
в подшипнике. Поскольку величина натяга неизвестна, при- нимаем β = 1;
![]() -
радиальная податливость
-
радиальная податливость
![]() при
нулевом зазоре. По табл. 25 [2] для радиальных
роликоподшипников она равняется:
при
нулевом зазоре. По табл. 25 [2] для радиальных
роликоподшипников она равняется:
![]()
![]() мм;
мм;
где Q - радиальная нагрузка, которое воспринимает наиболее нагруженное тело качения:
 кГс,
кГс,
где i - количество рядов тел качения;
z - количество тел качения в одном ряду;
![]() -
угол контакта;
-
угол контакта;
L - длина ролика, мм.
Радиальная податливость в контакте колец подшипника:
![]() ,
,
где k - коэффициент, который находится по [2].
Общая деформация двух подшипников:
![]()
Деформация подшипников скольжения открытого типа находится по закону Гука:
![]() ,
,
где R – радиальная нагрузка на один подшипник;
hпш – толщина вкладыша;
Fпш – проекция площади вкладыша на горизонтальную плоскость;
Ет – модуль жесткости текстолита; Ет= 0,011·105 МПа.
Деформация гидродинамических подшипников:
 ,
,
где rвкл, rц – радиусы втулки-вкладыша и втулки-цапфы, мм;
φ0 – угол критического сечения ГДП. Находится по рис.V.49 (Машины и агрегаты метзаводов. т.3) [1].
Деформация подушек:
![]() ,
,
где hпд – высота верхней перемычки подушки, которая воспринимает нагрузку от подшипника;
D – наружный диаметр подшипника;
S – толщина подушки.
Деформация подпятника:
 ,
,
где![]() –
толщина подпятника. Принимается
конструктивно;
–
толщина подпятника. Принимается
конструктивно;![]() -
диаметр центральной части подпятника,
который воспринимает нагрузку от винта;
он равняется диаметру винта;
-
диаметр центральной части подпятника,
который воспринимает нагрузку от винта;
он равняется диаметру винта;
![]() -
модуль жесткости материала подпятника
– бронзы (
-
модуль жесткости материала подпятника
– бронзы (![]() МПа).
МПа).
Деформация нажимного винта:
![]()
где
![]() -
высота винта и четырех витков резьбы:
-
высота винта и четырех витков резьбы:
![]() мм
мм
где t - шаг резьбы.
Деформация нажимной гайки:

где
![]() –
внутренний диаметр гайки, равный
наружному диаметру резьбы нажимного
винта.
–
внутренний диаметр гайки, равный
наружному диаметру резьбы нажимного
винта.