

Функция pz map ()
Функция pzmap() показывает расположение полюсов и нулей передаточной функции на комплексной плоскости S. Функция имеет вид:
Pzmap (Q)
где Q – имя передаточной функции
Пример 1.7
Представить на плоскости S нули и полюсы функции
6 s^4 + 77 s^3 + 158 s^2 + 230 s + 240
Q(s) --------------------------------------------
6 s^5 + 20 s^4 + 46 s^3 + 64 s^2 + 68 s + 48
Решение:
>> n=[6 77 158 230 240]; m=[6 20 46 64 68 48];
>> q=tf(n, m)
Transfer function:
6 s^4 + 77 s^3 + 158 s^2 + 230 s + 240
--------------------------------------------
6 s^5 + 20 s^4 + 46 s^3 + 64 s^2 + 68 s + 48
>> pzmap(q)
Процедуры определения нулей и полюсов передаточной функции показаны на рис. 2.7, а ответ представлен в виде рис. 2.8 с расположением нулей (кружки) и полюсов (крестики) на плоскости S.

Рис. 2.7. Определение нулей и полюсов передаточной функции
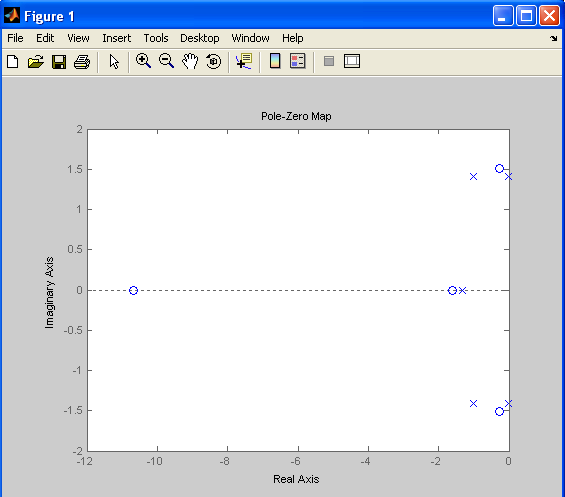
Рис. 2.8. Нули и полюсы передаточной функции
1.3.3. Функция series ()
Функция series () используется для образования передаточной функции системы, состоящей из последовательного соединения звеньев. Она имеет вид:
series(ql, q2)
где ql и q2 – передаточные функции последовательно соединенных звеньев.
Пример 1.8
Структурная схема системы управления показана на рис. 2.9
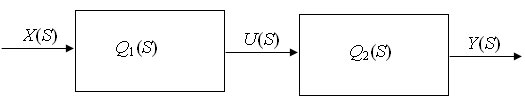
Рис. 2.9. Структурная схема системы
Необходимо получить передаточную функцию системы

Если передаточные функции звеньев имеют вид:

Решение:
>> n1=[14256 87 1];
>> m1=[198 0];
>> q1=tf(n1,m1);
>> n2=[0.5];
>> m2=[198 1];
>> q2=tf(n2,m2);
>> Q=series(q1,q2)
Transfer function:
7128 s^2 + 43.5 s + 0.5
-----------------------
39204 s^2 + 198 s
Ответом является произведение передаточных функций звеньев.
Функция parallel ()
Функция parallel () используется для образования передаточной функции системы, состоящей из последовательного соединения звеньев. Она имеет вид:
Parallel (q1, q2)
где q1и q2 – передаточные функции параллельно соединенных звеньев.
ПРИМЕР 2.9
Структурная схема системы управления приведена на рис. 2.10.
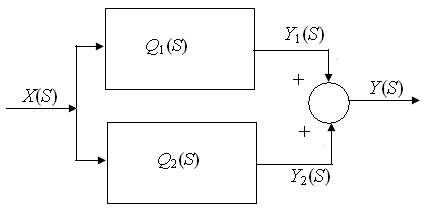
Рис.2.10. Структурная схема системы,
состоящая из параллельных звеньев
Необходимо получить передаточную функцию системы если передаточные функции звеньев имеют вид:

Решение:
>> n1=[14256 87 1];
>> m1=[198 0];
>> q1=tf(n1,m1);
>> n2=[0.5];
>> m2=[198 1];
>> q2=tf(n2,m2);
>> Q=parallel(q1,q2)
Transfer function:
2.823e006 s^3 + 31482 s^2 + 384 s + 1
-------------------------------------
39204 s^2 + 198 s
1.3.5. Функция feedback ()
Функция feedback () применяется для образования передаточной функции замкнутой системы по известным передаточным функциям разомкнутой системы и цепи обратной связи.
Она имеет вид:
feedback (q, goc, ±)
где;
goc – передаточная функция цепи обратной связи
± – указывает вид обратной связи ( -1 – положительная, + – отрицательная)._
Пример 1.10
Структурная схема системы управления приведена на рис. 2.11.

Рис. 2.11. Структурная схема системы управления
Передаточную функции звеньев имеют вид:

Передаточная функция цепи обратной связи образует отрицательную обратную связь с коэффициентом передачи, равным 1.
Необходимо получить передаточную функцию замкнутой системы управления:

Передаточная функция Q(S) определяется по выражению.

Из этого выражения и структурной схемы видно, что для получения передаточной функции замкнутой системы необходимо вначале образовать с помощью функции tf () звенья Q1(S) и Q2(S), затем посредством функции series о образовать передаточную функцию разомкнутой системы и после этих процедур использовать функцию feedback () для образования передаточной функции замкнутой системы.
Программа образования передаточной функции замкнутой системы управления имеет вид:
>> n1=[14256 87 1];
>> m1=[198 0];
>> q1=tf(n1,m1);
>> n2=[0.5];
>> m2=[198 1];
>> q2=tf(n2,m2);
>> Q=series(q1,q2)
Transfer function:
7128 s^2 + 43.5 s + 0.5
-----------------------
39204 s^2 + 198 s
>> feedback(Q, [1])
Transfer function:
7128 s^2 + 43.5 s + 0.5
-------------------------
46332 s^2 + 241.5 s + 0.5
Решение задачи приведено на рис. 2.12.
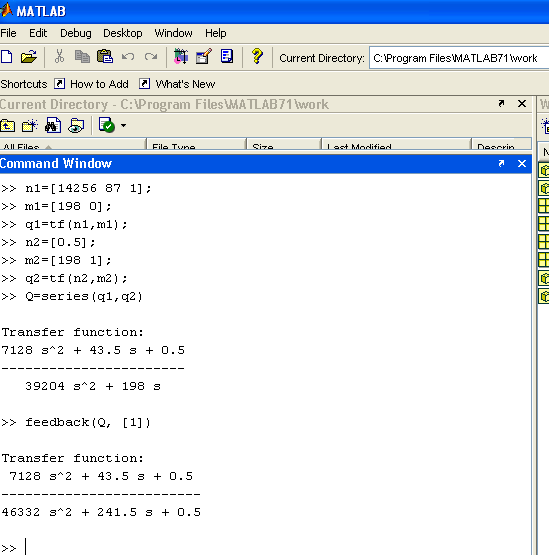
Рис. 2.12. Образование передаточной функции системы
с жесткой отрицательной обратной связью
Пример 1.11
Структурная схема системы управления приведена на рис. 2.13.
Необходимо получить передаточную функцию замкнутой системы

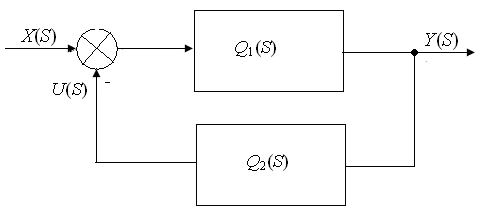
Рис.2.13. Структурная схема системы
с гибкой отрицательной обратной связью
Передаточные функции звеньев имеют вид:

>> n1=[14256 87 1];
>> m1=[198 0];
>> q1=tf(n1,m1);
>> n2=[0.5];
>> m2=[198 1];
>> q2=tf(n2,m2);
>> feedback(q1,q2,-1)
Transfer function:
2.823e006 s^3 + 31482 s^2 + 285 s + 1
-------------------------------------
46332 s^2 + 241.5 s + 0.5