

Задачник по ТУС
.pdfГЛАВА 9 СУДОВЫЕ ДВИЖИТЕЛИ
9.1 Принцип действия и типы движителей
Движителем называется гидравлическое устройство, преобразующее работу главного двигателя, приводящего в действие движитель в работу по преодолению силы сопротивления движению судна. Принцип действия движителей состоит в отбрасывании масс воды рабочими элементами (лопастями, плицами) в сторону, противоположную направлению движения судна. Силы реакции этих масс воды создают упор движителя, преодолевающего сопротивление движению судна. Простейшим движителем является весло, приводимое в действие мускульной силой гребца.
Одновременно с развитием судостроения было предложено много конструкций движителей, однако, практическое применение нашли только несколько типов. К ним относятся гребные колеса (рис. 9.1), гребные винты (рис. 9.2), крыльчатый движитель (рис. 9.3), и водометный движитель (рис. 9.4).
Рис. 9.1Принцип действия и схема гребного колеса
Рис. 9.2 Схема действия гребного винта
170

Рис. 9.3 Схема действия крыльчатого движителя
Рис. 9.4 Принцип действия водометного движителя:
а) - с подводным выбросом струи; б) - с надводным выбросом струи.
Из перечисленных типов движителей, благодаря высокому коэффициенту полезного действия (КПД), малому весу и большой надежности, гребной винт получил исключительное распространение на судах и в настоящем разделе подробно рассматриваться будет только этот тип движителя.
9.2 Элементы геометрии гребного винта
Лопасти гребного винта представляют собой профилированные крылья, совершающие одновременно вращательное и поступательное вдоль оси вращения движения. В связи с этим поверхности лопастей образованы по винтовым поверхностям. Если какая-нибудь часть радиуса вращается
171
вокруг оси 1 и одновременно перемещается вдоль оси, то любая точка этого радиуса описывает винтовую линию, а отрезок – винтовую поверхность (рис. 9.5).
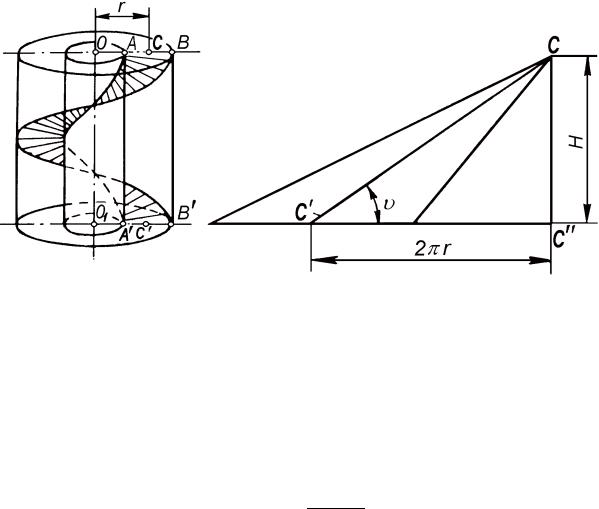
Рис. 9.5 Образование винтовой поверхности и развертка винтовой линии
Путь, проходимый точкой вдоль оси за один оборот, называется шагом винтовой линии, а отрезком – шагом винтовой поверхности. Если разрезать по образующей поверхность цилиндра с винтовой линией и развернуть на плоскость, то винтовая линия изобразится гипотенузой треугольника с катетами 2 ∙ ∙ и (шаг винтовой линии). Наклон гипотенузы определяется шаговым углом
|
|
|
= |
2 ∙ ∙ . |
(9.1) |
Гребной винт характеризуется не шагом, а отношением шага к диаметру винта HD , называемым шаговым отношением.
Винтовую поверхность нельзя развернуть на плоскость без искажения, поэтому площадь лопасти приближенно определяют как площадь спрямленного контура лопасти (рис. 9.6), который получается, если на контуре проекции лопасти провести сечения лопасти цилиндрами, соосными с винтом, и от оси лопасти отложить длины винтовых линий, полученных в сечениях.
Обозначим через площадь спрямленного контура, – число лопастей винта. Отношение площади всех лопастей к площади диска винта называется дисковым отношением
|
∙ |
|
|
|
= |
|
|
. |
(9.2) |
|
|
|||
|
|
|
|
|
172

Гребные винты транспортных судов имеют дисковые отношения в диапазоне 0,35 – 0,80.
Рис. 9.6 Контур нормальной проекции и контур спрямленной лопасти
Основными частями гребного винта являются ступица и примыкающие к ней лопасти. Диаметром винта называется диаметр окружности, проходящей через концы лопастей. Часть лопасти, примыкающая к ступице, называется корнем лопасти, а наиболее удаленная от оси – концом лопасти. Винты делятся на правого и левого вращения. Если, глядя в корму удаляющегося судна, мы увидим вращение винта по часовой стрелке, то это винт правого вращения, а если вращение против часовой стрелки, то это винт левого вращения. Боковую кромку лопасти, обращенную в сторону вращения винта, называют входящей, а противоположную ей – выходящей кромкой. Поверхность лопасти, на которую при переднем ходе действует реакция отбрасываемой воды, называют нагнетающей поверхностью, на ней возникает повышенное давление; противоположная поверхность лопасти (обращенная к корпусу) – засасывающая поверхность, на ней образуется разрежение. Линия пересечения обеих поверхностей образует контур лопасти. Сечение лопасти цилиндром, соосным с гребным винтом, дает ее профиль. Для гребных винтов применяются сегментные и авиационные профили сечения лопастей.
9.3 Кинематические характеристики гребного винта
Если бы гребной винт двигался в воде, как в неподвижной гайке, то за оборот он продвинулся бы вдоль оси на расстояние, равное шагу, но тогда не было бы отбрасывания масс воды и их реакции на лопастях. В действительности винт за один оборот проходит вдоль оси расстояние
173
меньше шага . Расстояние называется линейной поступью винта, а разность − – линейным скольжением.
Пусть гребной винт вращается с частотой и перемещается вдоль оси со
скоростью . Тогда его линейная поступь будет равнятся |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
= |
|
|
. |
|
|
|
|
|
(9.3) |
||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Эту величину выражают в долях диаметра винта и называют |
|||||||||||||||||
относительной поступью |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
= |
|
|
|
= |
|
|
|
, |
|
|
(9.4) |
|||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
∙ |
|
|
|||||||||
а скольжение выражают в долях шага винта |
|
|
|
|
|
|
|
|
|||||||||
|
|
− |
|
|
|
|
|
|
|
|
|||||||
= |
|
|
|
|
|
|
|
= 1 − |
|
. |
|
(9.5) |
|||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
9.4 Динамические характеристики гребного винта и характерные режимы |
|||||||||||||||||
его работы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Запишем формулы для упора и |
момента , развиваемого гребным |
||||||||||||||||
винтом в виде: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
∙ ∙ 2 |
∙ 4, кН, |
|
(9.6) |
|||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
= |
|
|
∙ ∙ 2 |
∙ 5, кНм, |
|
(9.7) |
|||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где – плотность забортной воды, т/м3; |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
– частота вращения гребного винта, с-1; |
|
|
|
|
|
|
|||||||||||
– диаметр гребного винта, м. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Мощность, потребляемая гребным винтом равна: |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= ∙ = 2 ∙ ∙ ∙ ∙ 3 ∙ 5 |
, кВт, |
(9.8) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
где – окружная скорость гребного винта, рад./с.
Полезная мощность, производимая винтом, равна ∙ , поэтому коэффициент полезного действия винта р найдем из выражения:
174

|
|
∙ |
|
∙ |
|
|
|
|
|
|
|
= |
|
= |
1 |
|
. |
|
|
(9.9) |
|
|
|
|
|
|
|
|
||||
|
р |
∙ |
2 ∙ 2 ∙ |
|
|
|
||||
|
|
|
|
|
||||||
|
В этих формулах 1 |
называется |
|
коэффициентом |
упора, а |
|||||
2 |
– коэффициентом момента. Графическое представление 1, |
2 |
и р |
от р |
||||||
называется кривыми действия винта или его динамическими характеристиками
(рис. 9.7).
Рис. 9.7 Кривые действия гребного винта
Рассмотрим некоторые характерные режимы работы гребного винта.
1. р = 0 – винт вращается, но не перемещается вдоль оси. Этот режим называется режимом работы винта на швартовых. В этом случае 1 и 2 будут наибольшими, так как углы атаки элементов будут наибольшими. Упор и момент также имеют наибольшие величины, коэффициент полезного действияр = 0, т.к. нет перемещения винта. С увеличением р углы атаки лопастей уменьшаются, что приводит к падению упора и момента и, соответственно, 1 и 2. При некоторой поступи 1 упор винта и K1 обращаются в нуль.
2. 1 = 0; = 0; р = 0; 2 0. Этот режим называется режимом нулевого упора. Он наступает, когда подъемная сила на лопасти будет настолько малой, что только уравновесит отрицательную составляющую упора от лобового сопротивления. Линейная поступь винта в этом режиме называется шагом
нулевого упора 1, обычно 1 . Отношение H1 есть гидродинамическое
D
175

шаговое отношение. При еще большей поступи обращается в нуль момент на винте.
3. 2 = 0; 1 0 и 0. Это режим нулевого момента. Линейная поступь винта в этом режиме называется шагом нулевого момента H2 , обычно H2 H1
. При еще большей поступи упор и момент будут отрицательными. Это будет работа винта в режиме турбины (например, вертушечный лаг или свободно вращающийся гребной винт у многовального судна). При ходе судна в обычном режиме плавания, гребной винт работает при поступи, находящейся в пределах от р = 0 до р = 1, т.е в промежутке от режима на швартовых до режима нулевого упора.
9.5 Диаграммы для расчета гребного винта
В отличие от кривых действия винтов диаграммы представляют данные для целой серии гребных винтов, отличающихся шаговым отношением, и эти данные изображаются на диаграмме в несколько ином виде, чем на кривых действия. Способ перестроения кривых в диаграмму для расчета винта показан на (рис. 9.8)
Рис. 9.8 Перестроение кривых действия винта в диаграмму расчета гребных винтов
На этой диаграмме кривые 1 и р изображаются в функции от р. Задаваясь значениями р, переносим соответствующие им поступи р на кривую 1. Проделав это для винтов с разными шаговыми отношениями, получим ряд кривых 1 с точками, соответствующими выбранным значениямр. Соединив точки с одинаковыми значениями р, получим линии равных
176

значений коэффициентов полезного действия. Совокупность линий 1 = (р)
для ряда значений HD , подписанных на них, и линий постоянных р и
представляют основные линии диаграммы для расчета гребных винтов (рис. 9.9. а). Аналогично строится диаграмма в осях р, 2 (рис. 9.9. б).
а)
б)
Рис. 9.9 Диаграммы для расчета гребных винтов, = 4, = 0,40
В настоящее время такие диаграммы построены для многих серий гребных винтов, внутри которых они отличаются числом лопастей, дисковым отношением и другими конструктивными параметрами. Каждая из этих диаграмм строится для серии гребных винтов, отличающихся шаговым отношением, но с одним и тем же дисковым отношением и числом лопастей. Диаграмма, построенная в осях р и 1 называется корпусной, а диаграмма в
177
осях р и 2 – машинной. Эти названия связаны с тем, что если задан корпус судна и его скорость, то при подборе винта исходят из величины сопротивления, через которое определяется потребный упор винта и, пользуясь диаграммойр – 1, подбирают винт и находят через р потребную мощность и частоту вращения машины, а затем, подобрав машину, рассчитывают винт, исходя из данных машины и используя диаграмму р – 2.
9.6 Взаимодействие гребного винта и корпуса судна
Гребной винт, как правило, всегда располагают за корпусом, а это в свою очередь влияет как на работу винта, так и на силы, действующие на корпус.
Движущийся корпус судна увлекает за собой массы воды, так что за его корпусом образуется поток, направленный в сторону движения судна. Этот поток называется попутным потоком. Обозначим через ср среднее значение скорости попутного потока по диску винта, тогда скорость винта вдоль оси р по отношению к скорости окружающей его жидкости выразится разностью
|
|
|
= − , м/с. |
(9.10) |
|
|
|
|
ср |
|
|
Скорость попутного потока оценивают в долях скорости судна, и |
|||||
отношение w |
cp |
называют коэффициентом попутного |
потока. Тогда |
||
|
|||||
|
|
|
|
||
скорость винта относительно воды запишется в виде |
|
||||
|
|
|
= ∙ (1 − w), м/с. |
(9.11) |
|
|
|
|
|
|
|
Скорость попутного потока распределена по диску винта неравномерно. Она наибольшая в диаметральной плоскости и убывает при удалении от нее, поэтому элементы лопасти за время одного оборота работают с разными углами атаки и разным качеством. Это приводит к тому, что упор ̅ и момент ̅ за корпусом отличаются от их значений и в свободной воде
̅ |
∙ , кН, |
(9.12) |
= 1 |
||
̅ |
∙ , кВт, |
(9.13) |
= 2 |
где 1 и 2 – коэффициенты влияния неравномерности попутного потока на упор и на момент. соответственно.
Для приближенной оценки величины коэффициента попутного потока можно пользоваться формулами: для одновинтовых транспортных судов с обтекаемыми рулями
178
w = (0,5 ∙ ) − 0,05, |
(9.14) |
|
|
|
|
а для двухвинтовых судов |
|
|
w = (0,55 ∙ ) − 0,2, |
(9.15) |
|
|
|
|
где – коэффициент полноты водоизмещения (общей полноты). |
|
|
|
|
|
Что касается коэффициентов 1 |
и 2, то они обычно лежат в пределах: |
|
1 = 0,98 – 1,00, 2 = 1,00 – 1,02. |
|
|
Работающий за кормой гребной винт вызывает подсасывание масс воды, вследствие чего кормовая оконечность обтекается с большими скоростями, чем при неработающем винте. Это вызывает падение давления в корме и увеличение сил трения, благодаря чему на корпусе возникает дополнительная сила , направленная против движения судна, которая называется силой засасывания. Эту силу оценивают в долях упора, развиваемого винтом.
Отношение t TP называют коэффициентом засасывания.
Таким образом, упор винта уравновешивает не только силу буксировочного сопротивления, но и силу засасывания = + , так что на преодоление силы идет часть силы упора = е = − = ∙ (1 − ). Силае называется эффективным упором или тягой винта.
Коэффициент засасывания зависит от формы судна и приближенно может быть оценен в долях попутного потока: для одновинтовых транспортных судов
с обтекаемыми рулями |
|
= ∙ w, |
(9.16) |
где = 0,5 – 0,9 – коэффициент зависящий, от конструкции руля и рудерпоста. А для двухвинтовых судов, с выкружками гребных валов или с
кронштейнами гребных валов
= (0,25 ∙ w) + 0,14, |
(9.17) |
|||
= (0,70 ∙ w) + 0,06. |
(9.18) |
|||
При работе винта в режимах, отличающихся от расчетного, следует |
||||
учитывать, что коэффициент засасывания зависит от |
скольжения S1 , |
|||
выражающегося через относительную поступь p |
|
|||
= 1 − ( |
|
|
). |
(9.19) |
|
||||
1 |
|
|
|
|
|
|
179 |