

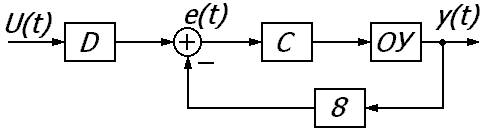
Типовая функциональная схема сар (замкнутая)
U(t) – задающее воздействие (общий сигнал в систему),
x(t) – управляющее воздействие (то, что вырабатывает регулятор),
y(t) – управляемая величина,
e(t) – отклонение (ошибка) управляемой величины от задающего воздействия.
Структура САУ:
1 Задающее устройство, которое преобразует входной сигнал U(t) в сигнал, удобный для дальнейшего использования;
2 сравнивающее устройство, вырабатывает сигнал ошибки (отклонения) как разность задающего сигнала и управляемой величины;
3 преобразующее устройство, преобразует сигнал ошибки в другую форму, удобную для дальнейшего использования, при этом не выполняются функции усиления и коррекции (пример: электрическаямеханическая);
4 и 8 корректирующие устройства, улучшают динамические свойства регулирования и повышают устойчивость. В зависимости от включения бывают параллельными или последовательными. 4 последовательная коррекция, 8 параллельная коррекция.

5 сравнивающее устройство местной обратной связи;
6 усилительное устройство, усиливает мощность сигнала;
7 исполнительное устройство, вырабатывает управляющее воздействие x(t) непосредственно на объект управления;
9 чувствительный элемент, фиксирует (измеряет) управляемую величину y(t);
10 элемент главной обратной связи, преобразует управляемую величину y(t) в вид, удобный для сравнения с задающим сигналом;
ОУ объект управления.
Блоки 1, 10, 9 образуют датчик, а блоки 3, 4, 5, 6, 7, 8 – сервомеханизм.
Тогда, с учетом укрупнений, получим:
Датчик измеряет управляемую величину и задающую. Сервомеханизм вырабатывает и реализует управляющее воздействие.
Реальная САУ может не содержать некоторые из рассматриваемых пронумерованных блоков. Некоторые блоки могут объединяться. То, что называли блоками, носит название звеньев. И регулятор, и ОУ могут состоять из нескольких звеньев.
![]() Два
сигнала – входной и выходной.
Два
сигнала – входной и выходной.
Классификация сау
Классификационные признаки САУ выделяют три крупные группы:
-
Классификация по характеру динамических процессов в системе.
-
Классификация по характеристикам управления.
-
Классификация по другим признакам.
Классификация по характеру динамических процессов в системе
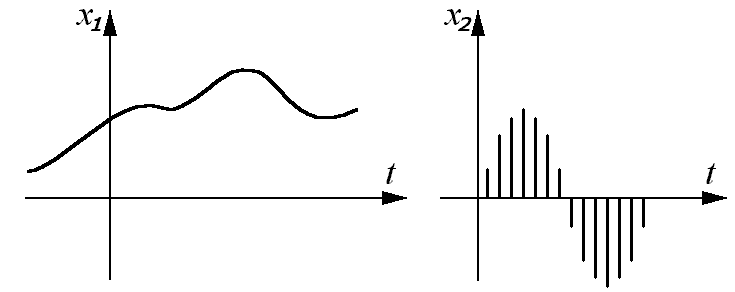
1. Непрерывность.
а) САУ бывают непрерывные это такие системы, в которых во всех звеньях непрерывному во времени входному сигналу соответствует непрерывный во времени выходной сигнал.
Для того чтобы система была непрерывная, необходимо наличие непрерывных статических характеристик системы.

б) дискретные САУ это такие системы, в которых хотя бы в одном звене непрерывному входному сигналу соответствует дискретный выходной сигнал (или импульс). Такое звено, называется импульсным.
К дискретным системам, как разновидность, относятся цифровые САУ, в которых функции регулятора выполняет цифровое устройство, а выходная величина представляет собой цифры.
в )
релейные
САУ (системы релейного действия)
это системы, в которых хотя бы в одном
звене непрерывной входной величине
соответствует выходная величина,
изменяющаяся скачком.
)
релейные
САУ (системы релейного действия)
это системы, в которых хотя бы в одном
звене непрерывной входной величине
соответствует выходная величина,
изменяющаяся скачком.
Статическая характеристика релейных систем имеет точку разрыва.