

4.4. Построение имитационных моделей динамических систем
В динамической системе, как правило, протекают процессы различной физической природы: механические, гидравлические, электрические, тепловые и т. д. Основой для построения структурной схемы такой системы служат физические законы. Они связывают между собой физические величины внутри системы и внешние силы. Основные уравнения динамической системы будем составлять с использованием понятия "динамические звенья", изучаемого в ТАР.
На первоначальном этапе составления структурной схемы связи между динамическими звеньями удобнее представлять в виде сети. Подобно структурным схемам, сети связей физических величин или просто сети связей используются для наглядного изображения физических зависимостей динамических систем. Между структурной схемой и сетью связей физических величин имеется прямое соотношение: прямоугольник структурной схемы соответствует
ветви, а линия передачи сигнала - узлу сети [15]. Сравним структурную схему (рис.4.3) и сеть связей физических величин (рис.4.4) одной и той же системы.

Рис.4.3. Структурная схема

Рис. 4.4. Сеть связей физических величин
Правила составления сети связей физических величин:
1) номер ветви соответствует номеру передаточной функции динамического звена;
2) ветвь, соединяющая одноименные величины, не имеет номера (передаточная функция для такой ветви равна единице);
3) элементу сравнения на сети связей соответствует разность, а сумматору - сумма двух величин, равная третьей величине (результату);
4) результат вычитания или суммирования всегда записывают справа от знака равенства.
Используя принцип декомпозиции, можно любую сколь угодно сложную динамическую систему разделить на связанные между собой элементарные звенья. Рассмотрим некоторые элементарные звенья, их сети связей, физические зависимости между входными и выходными величинами, а также передаточные функции.
1) Редуктор (рис.4.5).
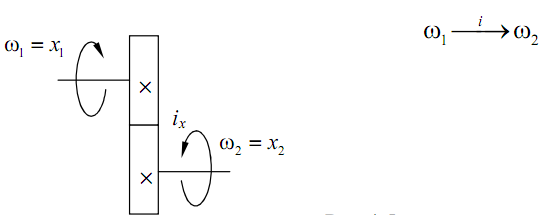
Рис.4.5
 2)
Пружина (рис.
4.6).
2)
Пружина (рис.
4.6).

Рис. 4.6
 3)
Цилиндр (рис.
4.7).
3)
Цилиндр (рис.
4.7).

Рис. 4.7
 4)
Электрическое
сопротивление (рис.4.8).
4)
Электрическое
сопротивление (рис.4.8).

Рис. 4.8
 5)
Гидравлический
дроссель (рис.4.9)
5)
Гидравлический
дроссель (рис.4.9)

Рис.4.

6) Движущаяся масса (рис.4.10).

Рис. 4.10
 7)
Индуктивность
(рис.4.11).
7)
Индуктивность
(рис.4.11).

Рис. 4.11

8) Ёмкость (рис.4.12).

Рис. 4.12
 9)
Жидкостное
трение (рис.4.13).
9)
Жидкостное
трение (рис.4.13).

Рис. 4.13
 10)
Преобразование
перемещения (рис.4.14).
10)
Преобразование
перемещения (рис.4.14).

Рис.4.14
 Построив
сеть связей и записав зависимости
физических величин для каждого
элементарного звена,
нетрудно
определить структурную схему и,
если необходимо,
передаточные
функции динамической системы.
Построив
сеть связей и записав зависимости
физических величин для каждого
элементарного звена,
нетрудно
определить структурную схему и,
если необходимо,
передаточные
функции динамической системы.
Пример 4.1
Требуется построить структурную схему гидравлического демпфера (амортизатора) с учетом массы подвижных частей. За входную величину принята сила, а за выходную – перемещение поршня (Рис.4.15).

Рис. 4.15. Демпфер (амортизатор)
где F - внешняя сила; Fг - гидростатическая сила; Fи – инерционная сила; x - перемещение поршня; P1,P2 - давления в полостях цилиндра; Q - расход жидкости через дроссель; S - площадь поршня; Rг - гидравлическое сопротивление дросселя.
Здесь разность внешней силы F и внутренней гидростатической силы Fг определяет инерционную силу Fи. Эта разность сил зависит от разности давлений жидкости ΔP = P2 – P1 в нижней и в верхней полостях цилиндра.
В
свою очередь,
инерционная
сила Fи
определяет ускорение поршня
 .
Проинтегрировав
ускорение
.
Проинтегрировав
ускорение
 ,
получим скорость
,
получим скорость
 ,
а проинтегрировав
скорость
,
а проинтегрировав
скорость
 ,
получим
перемещение x .
Скорость
,
получим
перемещение x .
Скорость
 определяет расход жидкости Q из нижней
полости в верхнюю полость,
что при известном
гидравлическом сопротивлении дроссельного
отверстия в поршне позволяет найти
разность давлений жидкости ΔP в нижней
и в верхней полостях гидроцилиндра,
а
определяет расход жидкости Q из нижней
полости в верхнюю полость,
что при известном
гидравлическом сопротивлении дроссельного
отверстия в поршне позволяет найти
разность давлений жидкости ΔP в нижней
и в верхней полостях гидроцилиндра,
а
следовательно, и гидростатическую силу Fг.
Сеть связей физических величин показывает рассмотренные качественные зависимости физических величин (рис. 4.16).

Рис.4.16. Качественные зависимости

Физические уравнения и соответствующие им передаточные функции определяют количественные зависимости физических величин.

Рис. 4.17. Структурная схема амортизатора
Структурная схема (рис.4.17) представляет собой имитационную модель гидравлического амортизатора. Движение этой модели легко описать с помощью системы линейных ДУ и решить их с помощью ЭВМ.
Пример 4.2
Двигатель постоянного тока (рис. 4.18).

Рис. 4.18 Двигатель постоянного тока
Рассмотрим отдельно электрическую и механическую части электрического двигателя. Входной величиной здесь является напряжение, а выходной - частота вращения вала двигателя ω. Под влиянием напряжения, через обмотку якоря протекает ток i, который, взаимодействуя с магнитным полем возбуждения Ф, создает на валу электродвигателя движущий момент:
M = c × i , (4.1)
где с - коэффициент, зависящий от конструкции двигателя.
При вращении якоря в магнитном поле в нем возникает ЭДС:
e = c × i. (4.2)
Она направлена против питающего напряжения U и поэтому вызывает уме-ньшение тока i. Коэффициент пропорциональности С в формулах (4.1) и (4.2) зависит от конструкции двигателя и силы магнитного поля Ф. Рассмотрим схему замещения якорной цепи двигателя при индуктивности якоря Lя = 0 (рис.4.19). Внешнее напряжение U уравновешивается суммой падения напряжения UR на омическом сопротивлении R якоря U и ЭДС e.
Следовательно, можно записать: U - e =UR.

Рис. 4.19. Схема замещения
Зная величину UR, можно определить ток i, а ток i определяет момент M на валу двигателя, последний, в свою очередь, связан с частотой вращения урав-нением движения:
 (4.3)
(4.3)
Определив ω - найдем ЭДС е. Рассмотренную причинно-следственную связь физических величин представим сетью связей (рис.4.20).

Рис. 4.20
В соответствии с сетью связей, запишем физические зависимости и следующие из них передаточные функции:

Сопоставив полученные выражения для передаточных функций с сетью связей, легко построить структурную схему двигателя (рис.21).

Рис.4.21. Структурная схема двигателя
Пример 4.3
Рассмотрим регулируемый электропривод на основе двигателя постоянного тока. Требуется построить имитационную модель электропривода с учетом массы якоря электропривода. Индуктивностью якорной цепи электродвигателя пренебречь (рис.4.22).

Рис. 4.22. Регулируемый электропривод
В данной системе входное воздействие – напряжение U1- сравнивается с выходным напряжением тахогенератора (ТГ) U3. Разница этих напряжений ΔU =U1 -U3 усиливается усилителем Y и подается на якорь двигателя постоянного тока Д. Частота вращения вала электродвигателя с помощью тахогенератора ТГ преобразуется в пропорциональный сигнал обратной связи U3. Сеть связей рассматриваемой системы имеет следующий вид (рис. 4.23).

Рис.4.23. Сеть связей
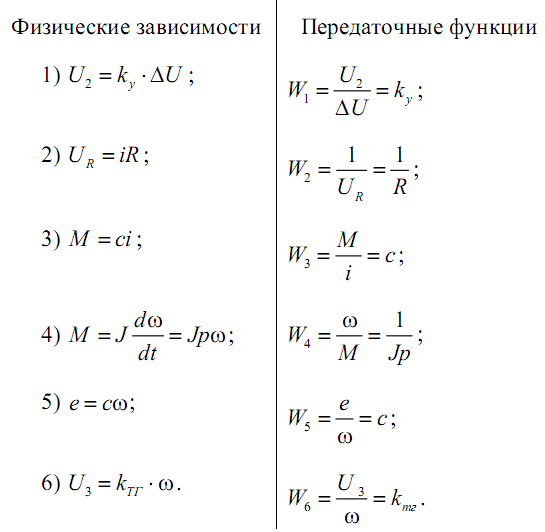
где U2- напряжение на якоре; e – ЭДС якоря; UR – падение напряжения на сопротивлении якоря; R - сопротивление якоря; i - ток якоря; M - момент на валу; J - момент инерции якоря; ω - частота вращения; c - постоянный коэффициент; U3- напряжение тахогенератора; kТГ - коэффициент передачи тахогенератора. Структурная схема представлена на рис.4.24.

Рис.4.24. Структурная схема