

3.4.1. Погрешности, вызываемые неточностью изготовления рычагов
Погрешность, вызываемая неточным изготовлением длин плеч рычагов (рис.3.11)
3 .4.2. Погрешность непропорциональности перемещений
Рис. 3.12. Схема непропорционального перемещения плеча рычага и измерительного стержня индикатора
Данная погрешность вызывается тем, что стержень индикатора в контрольных приспособлениях движется поступательно, в то время как плечо рычага имеет угловое перемещение (рис.3.12)
![]() (3.32)
(3.32)
где ℓ - длина плеча рычага;
![]() -
угол поворота рычага, рад.
-
угол поворота рычага, рад.
Угол определяется из условия :
![]() , (3.33)
, (3.33)
где
![]() -
допуск на контролируемый параметр.
-
допуск на контролируемый параметр.
3 Рис. 3.13. Схема контакта плоских концов рычага со сферическими наконечникам .4.3. Погрешность вследствие различного контакта концов плеч рычага (рис.3.13.)
Погрешность возникает вследствие того, что измерительный стержень индикатора перемещается поступательно, в то время как плечо рычага имеет угловое перемещение:
∆р![]() , (3.34)
, (3.34)
где
![]() (3.35)
(3.35)
a1
и![]() a2
- величина
перемещения концов плеч рычага;
a2
- величина
перемещения концов плеч рычага;
ℓ - длина плеч рычага;
![]() -
угол поворота рычага.
-
угол поворота рычага.
3.4.4. Передаточные отношения и погрешности рычагов сложной формы
Рис.
3.14.
Схема
для определения передаточного отношения:
а)-сложного рычага; б)-системы
рычагов
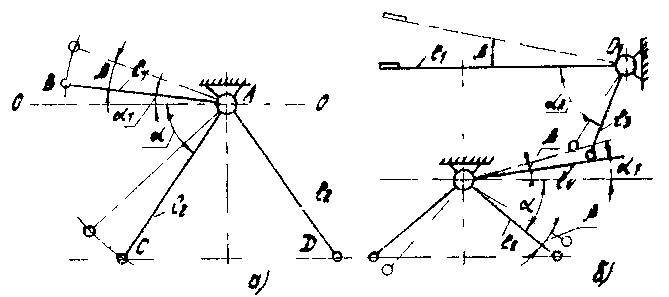
Передаточное отношение сложного рычага (рис.3.14)
![]()
![]()
![]()
![]() , (3.36)
, (3.36)
где
![]() ℓ1
– длина плеча рычага перемещающего
измерительный стержень индикатора;
ℓ1
– длина плеча рычага перемещающего
измерительный стержень индикатора;
![]() ℓ2-
длина плеча рычага, соприкасающегося
с контролируемой деталью;
ℓ2-
длина плеча рычага, соприкасающегося
с контролируемой деталью;
![]() -
угол, определяющий положение плеча
-
угол, определяющий положение плеча
![]() ℓ1
относительно той же оси.
ℓ1
относительно той же оси.
Передаточное отношение системы рычагов
![]() , (3.37)
, (3.37)
где
![]() ℓ3
и
ℓ3
и
![]() ℓ4
- длины
промежуточных рычагов;
ℓ4
- длины
промежуточных рычагов;
![]() -
угол, определяющий положение рычага
относительно горизонтальной оси ,
проходящий через ось вращение рычага;
-
угол, определяющий положение рычага
относительно горизонтальной оси ,
проходящий через ось вращение рычага;
![]() -
угол, определяющий положение рычага
относительно той же оси.
-
угол, определяющий положение рычага
относительно той же оси.
Погрешность
![]() р
рычага сложной формы (рис.3.15)
р
рычага сложной формы (рис.3.15)
Рис.
3.15. Схема для определения погрешности
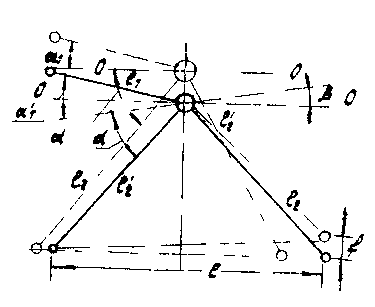
![]() у
рычага сложной формы
у
рычага сложной формы
![]() , (3.37)
, (3.37)
где
![]() - максимальный размер длины плеча рычага;
- максимальный размер длины плеча рычага;
![]() -
минимальный размер длины плеча рычага;
-
минимальный размер длины плеча рычага;
![]() -
угол, определяющий положение рычага
l1,
относительно горизонтальной оси,
проходящей через ось вращения рычага
-
угол, определяющий положение рычага
l1,
относительно горизонтальной оси,
проходящей через ось вращения рычага
![]() (3.38)
(3.38)
где
![]() -
угол, образованный из-за различной длины
плеч рычага (угол между линиями
-
угол, образованный из-за различной длины
плеч рычага (угол между линиями
![]() и ББ (рис.1.15)
и ББ (рис.1.15)
Угол
![]() определяется
из условия :
определяется
из условия :
![]() , (3.39)
, (3.39)
где
f-
величина не параллельности линии
![]() ,
относительно линии
,
относительно линии
![]() ,
проведенной через вершины плеч рычага
(рис.1.15);
,
проведенной через вершины плеч рычага
(рис.1.15);
![]() -
расстояние между вершинами плеч рычага.
-
расстояние между вершинами плеч рычага.
Погрешность ∆р вызываемая перемещением центра вращения сложных рычагов (рис.3.16);
∆р![]() , (3.40) где
, (3.40) где
![]() - угол поворота оси пальца рычага вокруг
центра О1
(угол между перпендикулярами к плоскостям
ММ и М1М1)
- угол поворота оси пальца рычага вокруг
центра О1
(угол между перпендикулярами к плоскостям
ММ и М1М1)
![]() -
максимальное расстояние от центра
вращения пальца до линии контакта
рычага.
-
максимальное расстояние от центра
вращения пальца до линии контакта
рычага.
Э
Рис.3.16.
Схема для определения погрешности
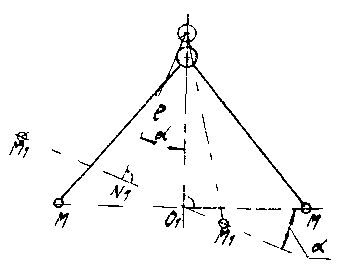
![]() ,
вызываемой перемещением центра вращения
рычага
,
вызываемой перемещением центра вращения
рычага