

6.2.* Тертя гнучких тіл
Важливою задачею в техніці і. зокрема, в технології швейного виробництва та технології виробництва із шкіри є визначення натягу нитки при її русі по циліндричній шорсткій напрямній поверхні.
Нехай нитка охоплює нерухомий циліндр радіуса R (рис. 6.4).

Рис. 6.4.
До
нитки прикладена сила
![]() .
Знайдемо, яку найменшу силу
.
Знайдемо, яку найменшу силу
![]() потрібно
прикласти до другого кінця нитки, щоб
зберегти рівновагу при даному куті
охоплювання АОВ
=
α.
потрібно
прикласти до другого кінця нитки, щоб
зберегти рівновагу при даному куті
охоплювання АОВ
=
α.
Для
розв'язання задачі розглянемо рівновагу
елемента DE
довжини
![]() .
Різниця натягів в точках D
і
Е
рівна
.
Різниця натягів в точках D
і
Е
рівна
![]() врівноважується
силою тертя dF:
врівноважується
силою тертя dF:
![]()
Величину сили dN визначимо з умови рівноваги:

Враховуючи,
що sin ,
одержимо
,
одержимо
 ,
оскільки
,
оскільки
 -
величина
другого порядку.
-
величина
другого порядку.
Тоді
![]() .
.
Розділимо змінні і проінтегруємо.
 або
або
 (6.10)
(6.10)
Ця
формула (формула Ейлера) дозволяє знайти
найменшу силу,
![]() здатну
зрівноважити силу
здатну
зрівноважити силу
![]() .
.

Рис. 6.5
Формула справедлива за наявності наступних припущень:
а) товщина нитки незмірне мала порівняно з радіусом циліндра,
б) нитка рухається, не деформуючись.
В багатьох практичних задачах при вивченні технологічних процесів швейного та взуттєвого виробництва діаметри ниток можуть бути співрозмірними з радіусами кривизни робочих органів машин. Такі, наприклад, умови ковзання нитки у вушкові голки. Вплив товщини нитки в цих умовах на її натяг виявляється досить значним.
Нехай нитка діаметром 2r ковзає по поверхні робочого органу машини. При цьому величина r співрозмірна з радіусом R напрямної. Виділимо елемент нитки dθ і покажемо сили, що діють на цей елемент (рис.6.5). Складаємо рівняння рівноваги для плоскої системи довільно розміщених сил:

При
малих кутах
 .
Тоді
.
Тоді
![]()
 ,
,
звідки аналогічно з виведенням формули Ейлера одержимо:
![]()

Розділяємо змінні й інтегруємо вираз
 звідки
звідки
 (6.11)
(6.11)
Формула (6.11) виводилась за припущень, що нитка ідеально гнучка, нерозтяжна, не зминається (зберігає циліндричну форму).
6.3. Рівновага тіла при наявності тертя кочення
Тертям кочення називається опір, що виникає при коченні одного тіла по поверхні іншого.

a) б)
Рис. 6.6
Нехай
круглий циліндричний коток, радіус
якого R,
а
вага
![]() ,
лежить на шорсткій площині. Прикладемо
до осі котка паралельно до
площини
силу тяги
,
лежить на шорсткій площині. Прикладемо
до осі котка паралельно до
площини
силу тяги
![]() .
Можливі два випадки:
.
Можливі два випадки:
Тіла
не деформуються (коток дотикається до
площини в точці
А)
(рис. 6.6а). У цьому випадку в точці А
виникає сила тертя
![]() ,
яка не допускає ковзання котка на
площині. Нормальна реакція прикладена
в точці А; вона зрівноважує силу
,
яка не допускає ковзання котка на
площині. Нормальна реакція прикладена
в точці А; вона зрівноважує силу
![]() ,
а сили
,
а сили
![]() і
і
![]() створюють
пару, що викликає кочення котка.
Дослід показує , що при достатньо малій
величині сил
створюють
пару, що викликає кочення котка.
Дослід показує , що при достатньо малій
величині сил
![]() коток залишається в спокої. Цей факт
неможливо пояснити, коли вважати всі
тіла абсолютно твердими. Коток, в цьому
випадку, мав би з площиною тільки одну
спільну точку А, а тоді головний
момент всіх сил. що діють на коток, був
би
коток залишається в спокої. Цей факт
неможливо пояснити, коли вважати всі
тіла абсолютно твердими. Коток, в цьому
випадку, мав би з площиною тільки одну
спільну точку А, а тоді головний
момент всіх сил. що діють на коток, був
би
![]() і одна
з
умов рівноваги не виконувалась. Тому
необхідно відмовитись від гіпотези
абсолютно твердого тіла.
і одна
з
умов рівноваги не виконувалась. Тому
необхідно відмовитись від гіпотези
абсолютно твердого тіла.
Тіла
деформуються (коток дотикається до
площини не в точці А, а вздовж малої дуги
АВ поверхні дотику) (рис. 6.6,б). При дії
сили
![]() інтенсивність
тиску в точці А зменшується, а в точці
В збільшується. В результаті реакція
інтенсивність
тиску в точці А зменшується, а в точці
В збільшується. В результаті реакція
![]() зміщується в бік дії сили
зміщується в бік дії сили
![]() .
З збільшенням Q
це
зміщення зростає до деякої граничної
величини k
. Таким
чином, в граничному положенні на
коток будуть діяти пара
.
З збільшенням Q
це
зміщення зростає до деякої граничної
величини k
. Таким
чином, в граничному положенні на
коток будуть діяти пара
![]() з
моментом і зрівноважуюча її пара (
з
моментом і зрівноважуюча її пара (![]() )
з моментом
)
з моментом
![]() .
.
З
рівності моментів ![]() знайдемо
знайдемо
 (6.12)
(6.12)
Якщо
![]() коток перебуває в спокої, при
коток перебуває в спокої, при
![]() починається кочення.
починається кочення.
Величину k називають коефіцієнтом тертя кочення, він вимірюється в сантиметрах.
Момент
![]() називається моментом
тертя кочення.
Отже,
якщо має місце рівновага, то виконується
умова:
називається моментом
тертя кочення.
Отже,
якщо має місце рівновага, то виконується
умова:
![]() (6.13)
(6.13)
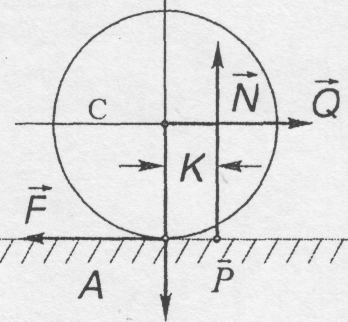
Складемо тепер рівняння рівноваги для котка:

 (6.14)
(6.14)
Перші
два рівняння дають F
= Q;
N
= Р , а з третього
можна знайти
![]() .
Далі з (6.13) знаходимо відстань між точками
А і В:
.
Далі з (6.13) знаходимо відстань між точками
А і В:
 (6.15)
(6.15)
Значення k залежать від матеріалу тіл і визначаються дослідним шляхом.
Відношення
 для більшості матеріалів значно менше
f,
тому в техніці, де це можливо, намагаються
замінити ковзання коченням (колеса,
котки, підшипники і т.п).
для більшості матеріалів значно менше
f,
тому в техніці, де це можливо, намагаються
замінити ковзання коченням (колеса,
котки, підшипники і т.п).
В
довідкових таблицях наводяться відношення
коефіцієнта тертя кочення до радіуса
циліндра (![]() )
для різних матеріалів.
)
для різних матеріалів.
Задача 6.1
Знайти, яку силу Q, направлену під кутом α = 30° до горизонту, необхідно прикласти до вантажу вагою Р = 10 кН., що лежить на горизонтальній площині, щоб зрушити його з місця, якщо статичний коефіцієнт тертя вантажу по площині f = 0.6 (рис. 6.7.)

Рис. 6.7
Розв'язання
За
умовою задачі потрібно розглянути
граничне положення рівноваги
вантаж.
В цьому положенні на нього діють сили
![]() .
.
Складаємо рівняння рівноваги:

З
рівняння (2)
![]() .
.
Тоді
з рівняння (3) маємо
![]() .
.
Підставивши
значення
![]() в рівняння (1):
одержимо:
в рівняння (1):
одержимо:

Задача 6.2
Визначити при яких значеннях кута α циліндр радіуса R. що лежить на похилій площині, зостанеться в спокої, якщо коефіцієнт тертя кочення дорівнює k (рис. 6.8):

Рис. 6.8
Розв 'язання
Розглянемо
граничне положення рівноваги, коли
![]() .
Розкладаючи силу
.
Розкладаючи силу
![]() на складові
на складові
![]() і
і
![]() ,
знаходимо, що в цьому випадку рушійна
сила
,
знаходимо, що в цьому випадку рушійна
сила
![]() ;
а нормальна реакція
;
а нормальна реакція
![]()
Тоді
за (6.12)
 .
.
При
зменшенні k
до
нуля величина α1
також
прямує до нуля. Тому робимо висновок,
що рівновага збережеться при будь-якому
куті
![]()
Питання для самоконтролю
1. Чому дорівнює та від чого залежить максимальна сила тертя ковзання?
2. Від чого залежить коефіцієнт тертя ковзання?
3. Що називається кутом тертя і конусом тертя?
4. Яка існує залежність між коефіцієнтом тертя ковзання і кутом тертя?
5. Якщо втрата рівноваги тіла може супроводжуватись ковзанням, то в чому полягає умова його рівноваги?
6. Від чого залежить і чому рівний максимальний момент тертя кочення?
7. Яка розмірність коефіцієнтів тертя ковзання і кочення?
8. Якщо втрата рівноваги тіла може супроводжуватись ковзанням чи коченням, то в чому полягають (додаткові) умови рівноваги?
9. Яке з (додаткових) умов рівноваги тіла повинно порушитись, для того щоб почалось кочення?
РОЗДІЛ 7. ЦЕНТР ВАГИ