Схемы переменных состояний (спс)
Схемы переменных состояния состоят из следующих основных элементов:
В основе СПС лежит единичный интегратор:

Следующим основным элементом СПС является пропорциональное (безынерционное) звено:
Сумматор.
Схемы переменных состояния строятся по передаточной функции объекта. Существует три способа построения схем состояния:
метод прямого программирования (базовый);
метод параллельного программирования;
метод последовательного программирования.
Метод прямого программирования (базовый)
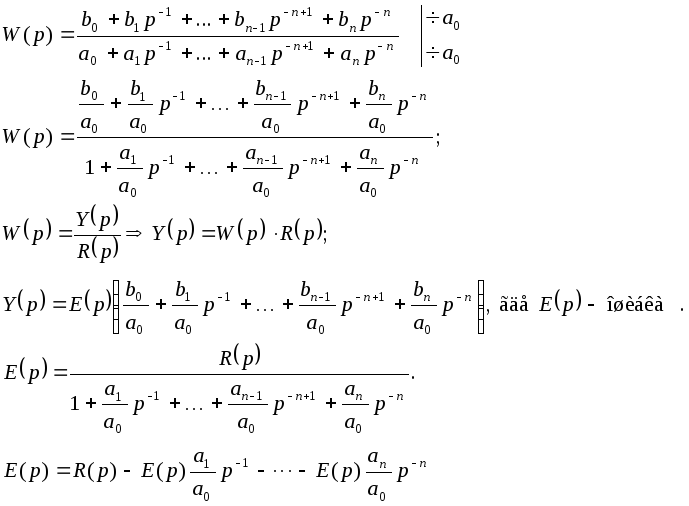
Используется, если описание САУ представлено в виде передаточной функции:
 ,
пусть n=m
,
пусть n=m
Алгоритм построения СПС базовым методом.
Получаем преобразованную передаточную функцию: числитель и знаменатель исходной делим на
 в наивысшей степени, (переходя тем самым
к отрицательным степеням
в наивысшей степени, (переходя тем самым
к отрицательным степеням ),
а также на коэффициентa0.
СПС построить невозможно, если m
> n.
),
а также на коэффициентa0.
СПС построить невозможно, если m
> n.
Строим последовательную цепь из k единичных интеграторов, где k - максимальный модуль степени р числителя преобразованной передаточной функции.

Числитель преобразованной передаточной функции позволяет построить прямые линии связи. Выход каждого (
 того)
интегратора умножается на соответствующий
коэффициент (
того)
интегратора умножается на соответствующий
коэффициент ( ),
затем получившиеся сигналы суммируются.
Если коэффициент (
),
затем получившиеся сигналы суммируются.
Если коэффициент ( )
= 0, то это говорит об отсутствии
соответствующего сигнала. Количество
слагаемых числителя преобразованной
передаточной функции равно количеству
сигналов, образующих выходной сигнал.
)
= 0, то это говорит об отсутствии
соответствующего сигнала. Количество
слагаемых числителя преобразованной
передаточной функции равно количеству
сигналов, образующих выходной сигнал.
Коэффициент
![]() соответствует сигналу ошибки. Еслиm
< n,
то коэффициент, соответствующий сигналу
ошибки будет равен нулю.
соответствует сигналу ошибки. Еслиm
< n,
то коэффициент, соответствующий сигналу
ошибки будет равен нулю.
Знаменатель преобразованной передаточной функции позволяет построить обратные линии связи (аналогично). Коэффициенты знаменателя со знаком (+) соответствуют отрицательным обратным связям и наоборот. Наличие единицы в знаменателе обязательно, но оно не отображается на СПС.
В методе пространства состояния (если нет иных оговорок) нумерация внутренних переменных идет с конца.
Пример:
Рассмотрим следующую передаточную функцию:
![]() ,
преобразуем ее в
,
преобразуем ее в
 .
.
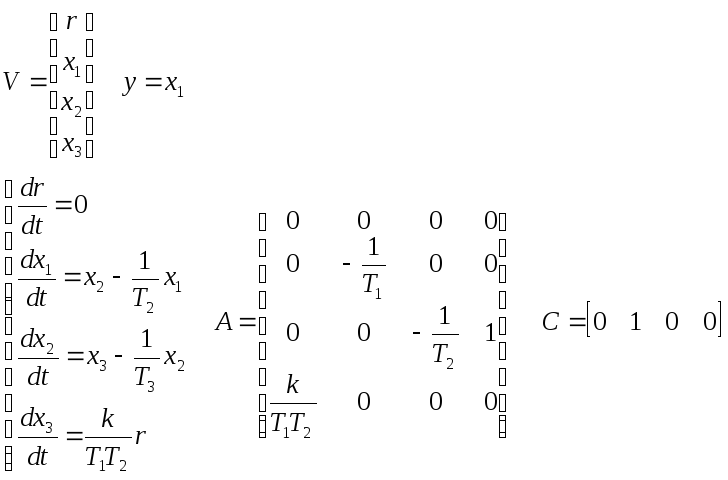
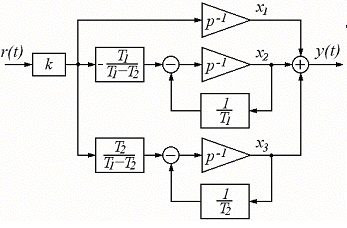
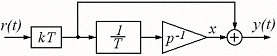
По данным строим схему:
П

 ,
выходной же вектор -
,
выходной же вектор -
![]() .
.
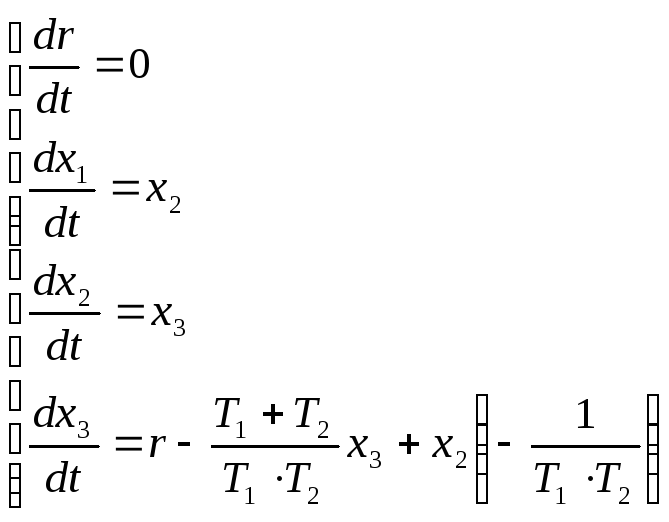
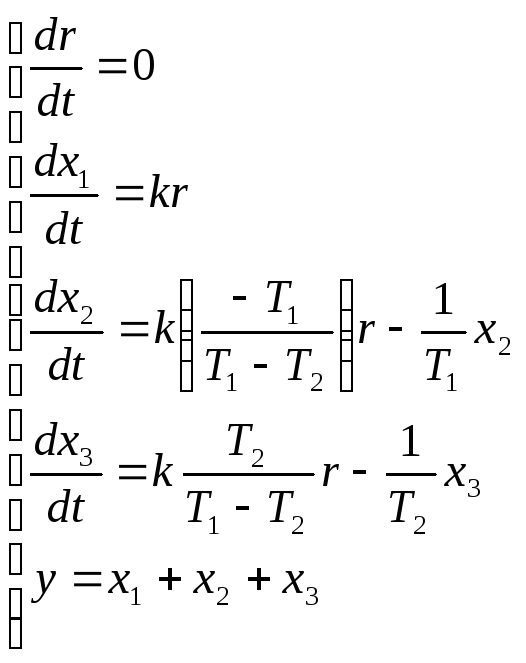
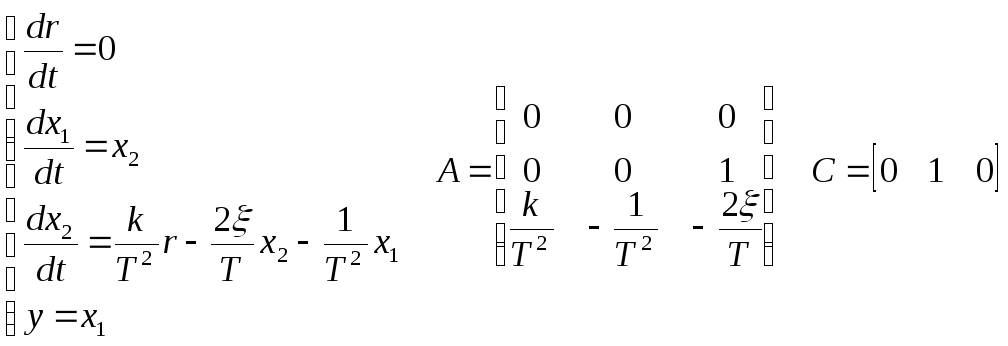
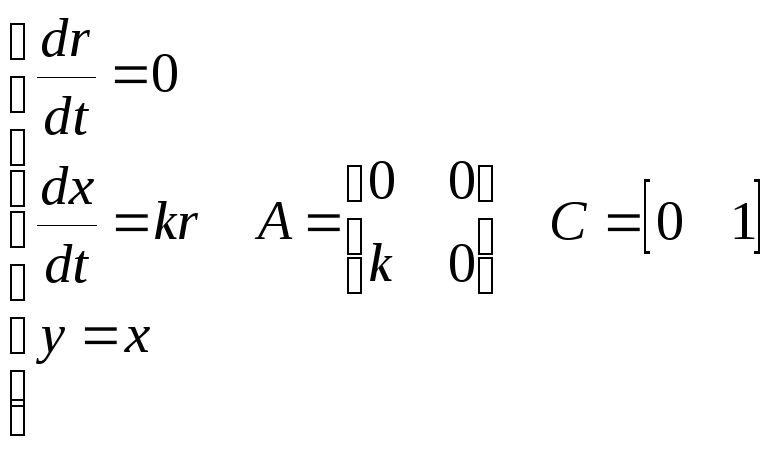
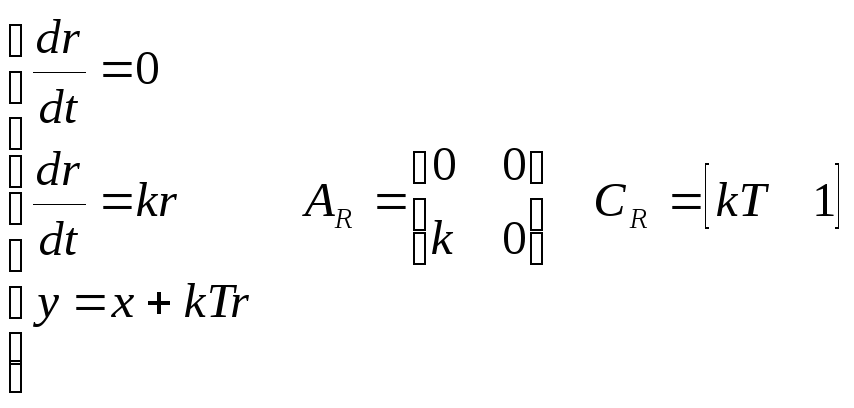
Допустим, что r(t) – единичная ступенчатая функция, тогда система уравнений будет иметь вид:
Для
y(t)
составим уравнение:
![]() .
.
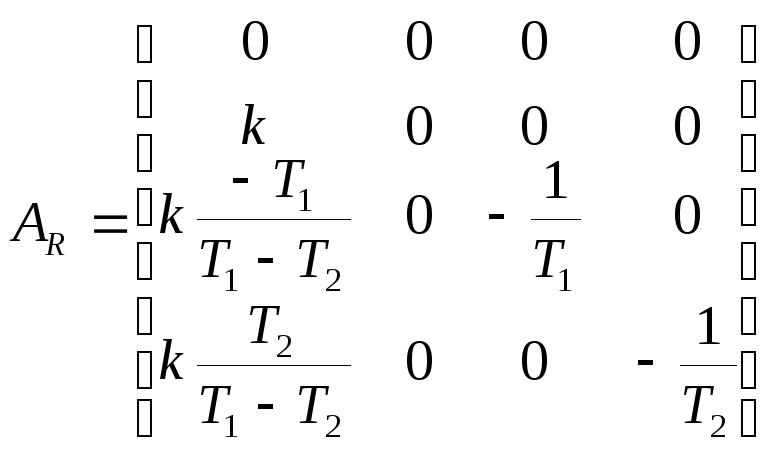
Определяем
матрицу коэффициентов:
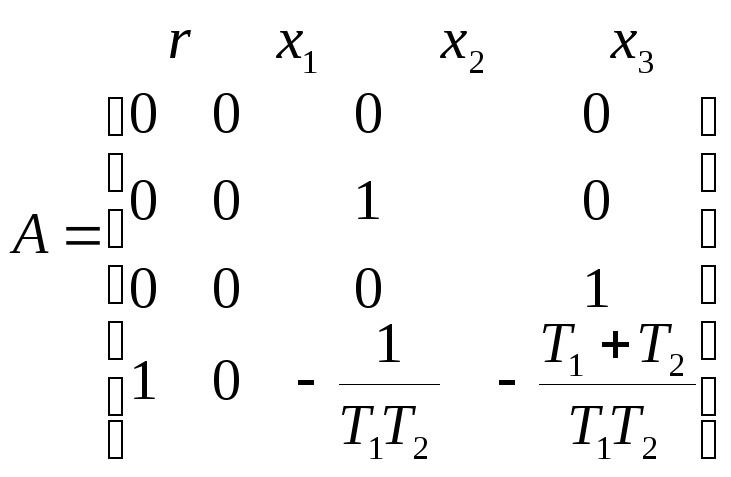 .
.
Матрица
выхода:
![]() .
.
Т.о., если записать в матричном виде, то получим уравнения:
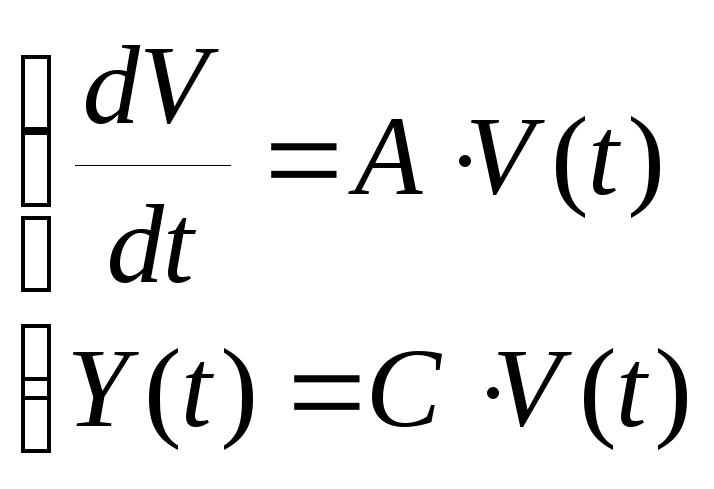 .
.
Методы последовательного и параллельного программирования
В этом случае исходная структурная схема представлена в виде соединений звеньев, либо передаточная функция представлена произведением (или суммой) передаточных функций простейших звеньев. В этом случае схема переменных состояния получается путем последовательного построения СПС для каждого из звеньев (базовым методом).
Пример:

Схема состояния будет выглядеть следующим образом:
С
Т.о. матрица коэффициентов А имеет следующий вид:
 ;
а матрица
;
а матрица
![]() .
.
Схемы переменных состояния типовых звеньев
Апериодическое звено:
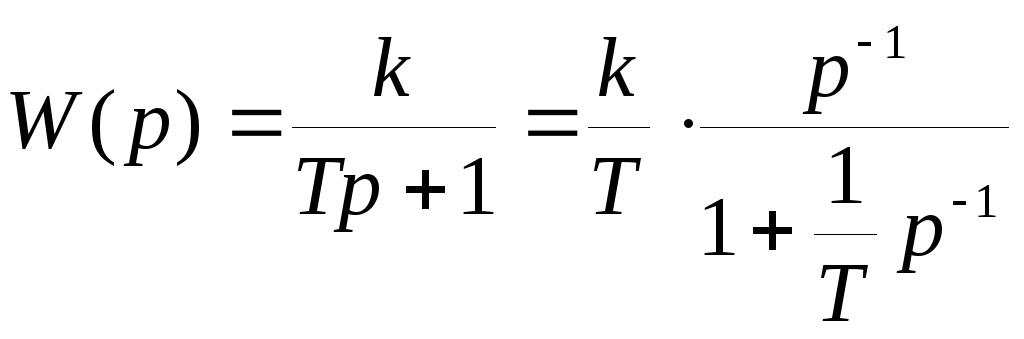
Схема состояния такого звена имеет вид:


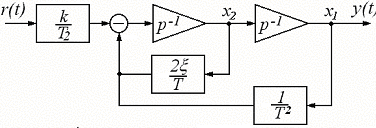
Колебательное звено:

Ему соответствует схема состояния следующего вида:
Идеальное интегрирующее звено:
![]()
Схема состояния:
![]()
Идеальное дифференцирующее звено:
![]()
Схема состояния идеального дифференцирующего звена не существует.
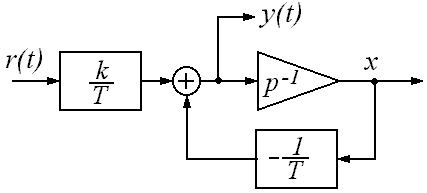
Реальное дифференцирующее звено:
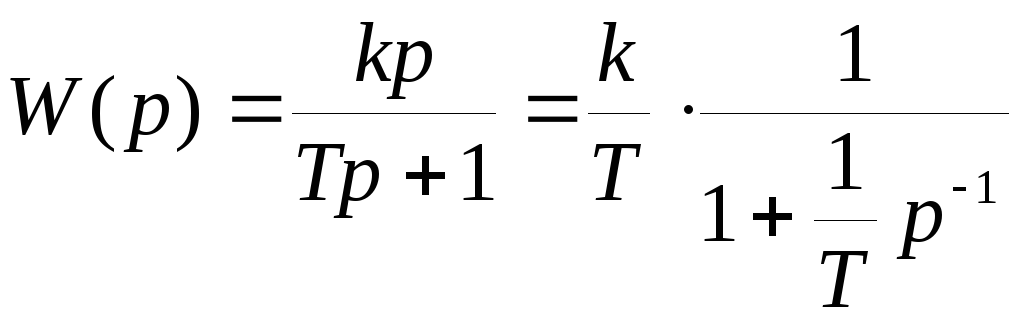
Схема состояния имеет вид:
Изодромное звено:
![]()
Схема состояния:
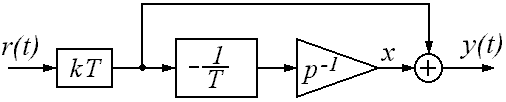
Построим схему из предыдущего примера методом последовательного программирования: