

2.2. По режимам функционирования.
В зависимости от характера изменения задающего воздействия во времени автоматические системы управления разделяются на следующие классы:
а )Стабилизирующая автоматическая
система управления (система
стабилизации) – это система, алгоритм
функционирования которой содержит
предписание поддерживать значение
управляемой величины постоянным:
)Стабилизирующая автоматическая
система управления (система
стабилизации) – это система, алгоритм
функционирования которой содержит
предписание поддерживать значение
управляемой величины постоянным:
![]()
б) Алгоритм функционирования программной автоматической системы содержит предписание изменять управляемую величину в соответствии с заранее заданной функцией времени f(t):
![]()
в) Следящая автоматическая системауправления предназначена для изменения управляемой величины в соответствии с изменениями другой величины, которая действует на входе системы и закон изменения которой заранее не известен:
![]() ,
,
Следящие системы используют обычно для дистанционного управления перемещением объектов в пространстве.
2.3. По свойствам системы в установившемся режиме.
а) Статические системы это такие системы, в которых управляемая величина в установившемся режиме зависит от величины возмущающего воздействия, в них при заданном воздействии, которое стремится к постоянному, отклонение управляемой величины также стремится к постоянной величине, отличной от нуля.
б) Астатические системы это такие системы, в которых управляемая величина в установившемся режиме не зависит от величины возмущающего воздействия, в них отклонение управляемой величины при любом постоянном задающем воздействии стремится к нулю.
3. Классификация сау по другим признакам
3.1. По усилению мощности сигнала.
а) САУ прямого действияэто такая САУ, в которой используется энергия управляемого объекта.
б) САУ непрямого действия это САУ, в которых управляющий сигнал создаётся дополнительным усилительным устройством.
3.2. По количеству контуров в системе.
а) одноконтурные САУ – системы, в которых существует только одна главная обратная связь.
б) многоконтурные САУ – системы, в которых помимо обратной главной связи существуют местные обратные связи.
3.3. По связности системы.
а) односвязные САУ это САУ, в которых присутствует либо один регулятор, либо несколько регуляторов, взаимодействие которых учитывается в законе управления.
б) многосвязные САУ это САУ, в которых присутствует несколько регуляторов независимых друг от друга.
3.4. По размерности системы.
а) одномерные САУ – системы, в которых существует один управляющий сигнал и одна управляемая величина.
б) многомерные САУ – системы, в которых количество управляемых величин и управляющих сигналов превышает единицу.
Примеры систем регулирования
Э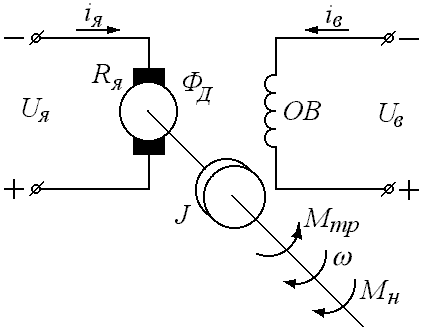 лектродвигатель
постоянного тока.
лектродвигатель
постоянного тока.
Фд магнитный поток двигателя;
iя ток якоря двигателя;
Uя напряжение якоря двигателя;
Rя сопротивление якоря двигателя;
iв ток обмотки возбуждения;
Uв напряжение обмотки возбуждения;
Мтр момент трения, возникающий на валу двигателя;
частота вращения вала двигателя;
J момент инерции механизма, приведенного к валу двигателя;
Мнагр момент нагрузки на валу двигателя.
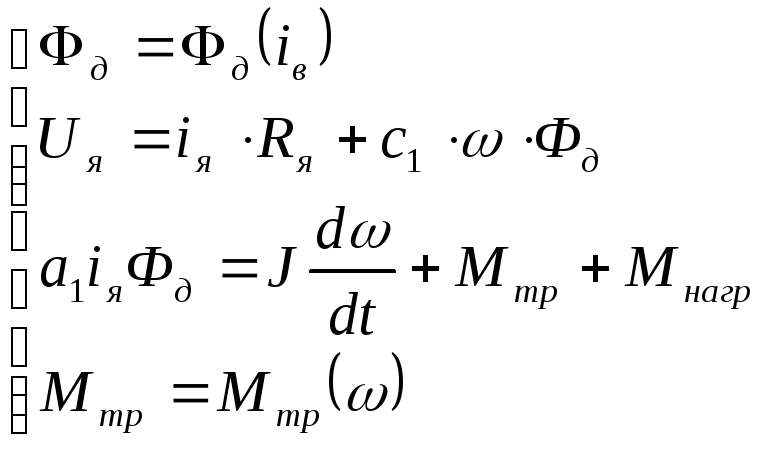
Запишем уравнения:
 -
динамические характеристики.
-
динамические характеристики.
При статической характеристике все производные зануляются.
a1 и c1 конструктивные параметры двигателя;
Фд - является нелинейной функцией от тока возбуждения;
Мтр является нелинейной функцией от частоты вращения вала двигателя;
Управляющим воздействием является Х = Uя(Uв), управляемой величиной – У = , нагрузка (внешнее воздействие) – Z = Uв(Uя), Мнагр, Мтр – помеха.