

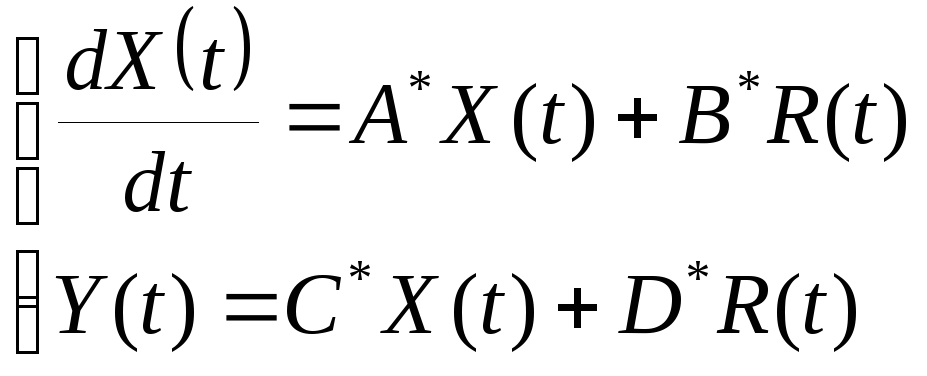
Связь между описанием “вход-выход” и мпс
Так
как
![]() при ННУ, то первое уравнение:
при ННУ, то первое уравнение:

Подставляем
в
![]() :
:
![]()
![]()
Из
этого уравнения видно, что определитель
матрицы
![]() - есть характеристическое уравнение
системы.
- есть характеристическое уравнение
системы.
(![]() )
)
Пример.
Получить передаточную функцию, если СПС имеет вид:
A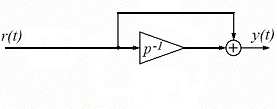 *=[0]
*=[0]
B*=[1]
C*=[1]
D*=[1]
![]()
Матрица перехода. Аналитический способ получения матрицы перехода
Дано описание САУ:
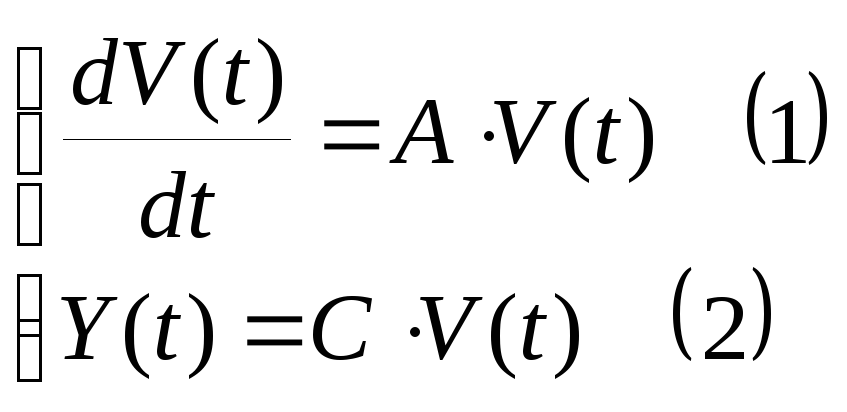
Надо найти решение этой системы уравнений.
Чтобы решить эту систему, применим к уравнению (1) прямое преобразование Лапласа, причём, учтём, что начальные условия могут быть ненулевыми ( при исследовании мы обычно считаем ННУ, а в действительности – любые):

Сгруппируем:
![]() ,
,
где
![]() - квадратная матрица;
- квадратная матрица;![]() - единичная матрица.
- единичная матрица.
Умножим уравнение (4) слева на обратную матрицу (pI-A):
![]()
![]()
![]() -
изображение матрицы перехода
-
изображение матрицы перехода
Применяя обратное преобразование Лапласа, получаем:
![]() ,
,
Таким образом, решение уравнения имеет вид:
![]()
здесь
![]() - матрица (расширенная) перехода,
- матрица (расширенная) перехода,
![]() .
.
Анализируя это уравнение, видим, что если нам известны начальные условия (а они обычно известны), то, чтобы знать всё о поведении системы, значения переменных в любое время t, нужно найти матрицу перехода.
Эта
матрица может быть получена тремя
способами, первый – аналитический –
рассмотрен нами только что, алгоритм
получения матрицы – в её определении
![]()
Пример:
Рассмотрим
апериодическое звено -
![]() .
.
Т=1,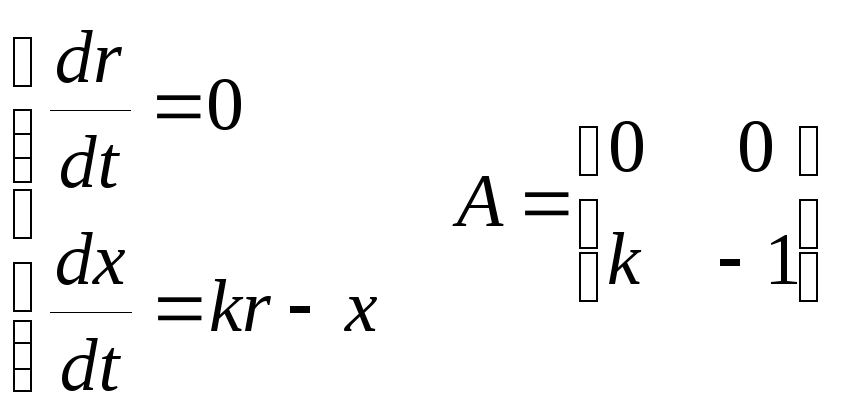
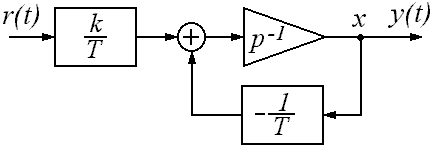
Найдем Ф(t):

![]()
Получение изображения матрицы перехода по схеме переменных состояния
Допустим, матрица перехода имеет вид:

Для i-той составляющей обобщенного вектора можно записать:
![]() .
.
Допустим,
что в этом уравнении
![]() ;
;
Если
начальное условие
![]() (это выход интегратора), то это означает,
что наj
–тый вход интегратора был подан единичный
импульс (интеграл дельта-функции есть
единичная функция) и тогда уравнение
для i-
той составляющей обобщенного вектора
принимает вид
(это выход интегратора), то это означает,
что наj
–тый вход интегратора был подан единичный
импульс (интеграл дельта-функции есть
единичная функция) и тогда уравнение
для i-
той составляющей обобщенного вектора
принимает вид
![]() ,
,
т.е.
соответствующий i-й
выход интегратора есть реакция на
единичный импульс и эта реакция есть
элемент
![]() ,
матрицы переходаФ(t).
,
матрицы переходаФ(t).
Элемент
![]() ,
матрицы переходаФ(t)
определяется по схеме переменных
состояния как реакция i-й
переменной на единичный импульс, поданный
на j-ю
переменную при прочих нулевых начальных
условиях. Реакция на единичный импульс
– это, по определению, функция веса -
,
матрицы переходаФ(t)
определяется по схеме переменных
состояния как реакция i-й
переменной на единичный импульс, поданный
на j-ю
переменную при прочих нулевых начальных
условиях. Реакция на единичный импульс
– это, по определению, функция веса -
![]() .
.
Учитывая
связь между функцией веса и передаточной
функцией, получаем, что элемент
![]() ,
изображения матрицы переходаФ(р)
представляет
из себя передаточную функцию между
входом j-того
интегратора
и выходом
i-того
интегратора.
,
изображения матрицы переходаФ(р)
представляет
из себя передаточную функцию между
входом j-того
интегратора
и выходом
i-того
интегратора.
Алгоритм получения матрицы Ф(р) по СПС.
1). Дорисовываем дополнительный (мнимый) интегратор на входе системы, учитывая тем самым, что на вход системы подаётся единичный ступенчатый сигнал.
2).
Задаемся порядком переменных в обобщенном
векторе
![]() ,
по СПС.
,
по СПС.
3). В соответствии с выбранным порядком нумеруем выходы интеграторов.
4). Получаем элементы матрицы Ф(р), используя формулу Мейсона.
5). При получении элементов матрицы учитываем детектирующее свойство системы, определяемого как способность передавать информацию по основному каналу только в направлении стрелок интеграторов, т.е. слева направо.
Получение матрицы перехода разложением в ряд
Решением дифференциального уравнения (1) является:
![]()
![]()
Вычислять
до тех пор, пока:
![]()
Такой метод получения матрицы перехода легко реализуем на компьютере и поэтому наиболее используем в настоящее время.