

Импульсные сау
Характеристики импульсного элемента:
высота импульса (амплитуда);
длительность импульса (ширина);
положение импульса в пределах интервала дискретности;
шаг квантования (шаг дискретности) – Т0.
В зависимости от того, какой из параметров модулируемой последовательности импульсов изменяется по закону изменения модулирующего сигнала x(t), различают следующие виды модуляции сигнала:
а
мплитудно-импульсная модуляция (АИМ) – ряд импульсов, одинаковых по ширине, начинающихся с одного момента nT0. При АИМ значениям модулирующего сигнала x(t) пропорциональны амплитуды (высоты) импульсов xи: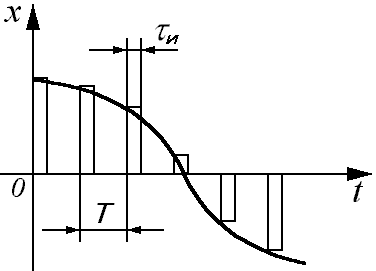
![]()
ш
иротно-импульсная модуляция (ШИМ) - выходные сигналы одинаковые по амплитуде и интервалу дискретности, но разные по ширине, т.е. значениям модулирующего сигналаx(t) пропорциональны длительности и импульсов: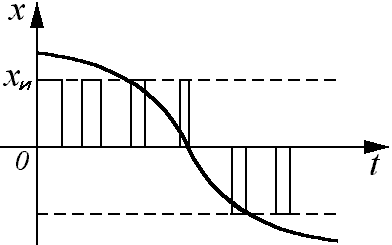
![]()
Чем выше уровень входного сигнала, тем импульс шире.
временная – импульсная модуляция (ВИМ) или частотно-импульсная (ЧИМ). При ВИМ значениям модулирующего сигнала x(t) пропорциональна частота д импульсов:
![]()

Выходной сигнал постоянен по амплитуде и ширине, меняется положение интервала дискретности.
Импульсный элемент формирует последовательность импульсов. Для определения выхода ключа хк1() в интервале 0Т0 между замыканиями, ставится фиксирующий элемент; назначение которого – зафиксировать каким-либо способом значение сигнала после ключа. Как правило, значение сигнала после ключа с помощью фиксирующего элемента апроксимируется произвольным полиномом:
![]() .
.
Порядок экстремума полинома определяет порядок экстраполятора.
Ф
иксатор - экстраполятор нулевого порядка: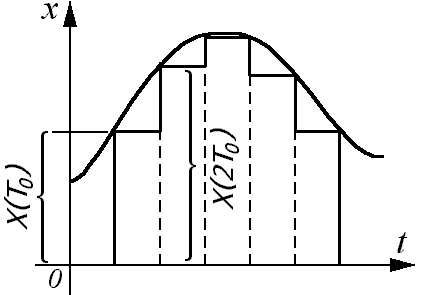
![]()
Ф
иксатор - экстраполятор первого порядка: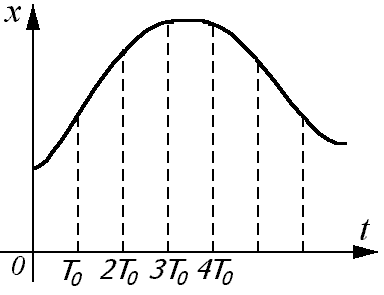
![]() ,
где
,
где

В ТАУ для описания фиксаторов используются экстраполяторы первого и нулевого порядка.
Ошибка е(t) появляется в момент времени kТ0, в виде кратковременного импульса. Фиксатор всегда стоит после импульсного элемента.
М атематическое описание дискретной системы
Математическое описание и анализ импульсной системы с амплитудной модуляцией существенно упрощаются, если все сигналы в системе рассматривать только в дискретные моменты времени t = 0T0; 1T0; 2T0;… ; kT0;…; ∞. При этом каждый непрерывный сигнал x(t) удобно представить в виде решетчатой функции времени x(kT0) значения которой определены только для дискретных моментов времени:
![]()
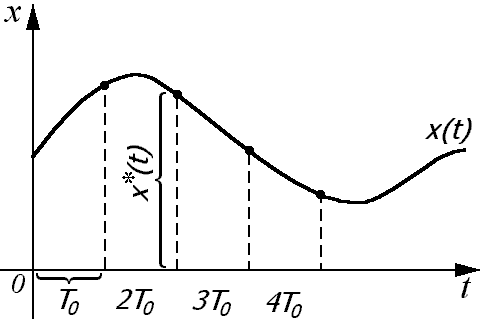
Между дискретными значениями аргумента tфункцияx(kT0)равна нулю.
Непрерывная функция x(t) является огибающей для решетчатой функции x(kT0), и каждому конкретному сигналу x(t) соответствует вполне определенный сигнал x(kT0).
Последовательность неединичных импульсов, образующих решетчатую функцию на интервале 0kT0, можно представить в виде бесконечного ряда
![]() ,
,
где k- номер интервала дискретности, x*(t) – решетчатая функция, x(t) – огибающая решетчатой функции, (t-kT0) – смещенная дельта-функция, существующая только в моменты времени t=kT0 и равная нулю при всех других значениях t.
Применим
к этой сумме преобразование Лапласа,
учитывая при этом, что изображение суммы
оригиналов равно сумме их изображений,
а также, что согласно теореме запаздывания
изображение смещенной дельта-функции
равно
![]() .
Тогда изображение решетчатой функции
по Лапласу
.
Тогда изображение решетчатой функции
по Лапласу
![]() .
.
Данное
выражение называется дискретным
преобразованием Лапласа.
Оно содержит трансцендентный сомножитель
![]() ,
из-за которого изображенияХ*(р)
и соответствующие передаточные функции
становятся иррациональными функциями
аргумента р,
что создает определенные трудности при
их использовании. Поэтому с целью
получения передаточных функций импульсных
систем в дробно-рациональной форме,
свойственной непрерывным системам,
целесообразна замена аргументов
,
из-за которого изображенияХ*(р)
и соответствующие передаточные функции
становятся иррациональными функциями
аргумента р,
что создает определенные трудности при
их использовании. Поэтому с целью
получения передаточных функций импульсных
систем в дробно-рациональной форме,
свойственной непрерывным системам,
целесообразна замена аргументов
![]() ,
,
и тогда получим преобразование, более удобное для практического использования
![]() ,
,
называемое z-преобразованием решетчатой функции x(kT0).